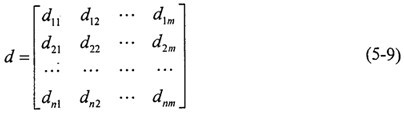
���ڻ�ɫϵ�y(t��ng)��Փ�Ķ�Ŀ��(bi��o)��(d��ng)�B(t��i)��(y��u)���O(sh��)Ӌ(j��)
5.1����
�S�����a(ch��n)�ͿƌW(xu��)���g(sh��)�ĸ��ٰl(f��)չ�������C(j��)е�a(ch��n)Ʒ�c�O(sh��)����u����ٻ�ᡢ��Чĵ�ǡ����ܷ��ϡ��p�������Ԅ�(d��ng)������l(f��)չ�������a(ch��n)Ʒ�Y(ji��)��(g��u)����څ��(f��)�s˲�������乤�����ܵ�Ҫ��Խ��Խ���ĻΡ��ڬF(xi��n)���C(j��)е�O(sh��)Ӌ(j��)�У����O(sh��)Ӌ(j��)�������ܵęC(j��)е�a(ch��n)Ʒ���ǣ��茦�C(j��)е�ĽY(ji��)��(g��u)�ڻ����ɿ��Լ���(d��ng)�B(t��i)���Եȶ�������M(j��n)�оC���u�r(ji��)ѩ�顣�����y(t��ng)�Ć�һ�o�B(t��i)�O(sh��)Ӌ(j��)����(j��ng)���ܝM�����a(ch��n)���C(j��)е�a(ch��n)Ʒ��(d��ng)�B(t��i)���ܵ�Ҫ�������������ʹ�C(j��)е�Y(ji��)��(g��u)ϵ�y(t��ng)ͬ�r(sh��)�������õ��o����(d��ng)�B(t��i)���Գ�ִ����회����M(j��n)�ж�Ŀ��(bi��o)��(d��ng)�B(t��i)��(y��u)���O(sh��)Ӌ(j��)��塣
���ڏ�(f��)�s�C(j��)е�a(ch��n)Ʒ��(d��ng)�B(t��i)��(y��u)���O(sh��)Ӌ(j��)���˂�������Ô�(sh��)�W(xu��)Ҏ(gu��)�����ܶ�������Ӌ(j��)��C(j��)�Ԅ�(d��ng)��ɽY(ji��)��(g��u)ϵ�y(t��ng)�����ă�(y��u)���^�̱������Ա����O(sh��)Ӌ(j��)�A�μ��ɫ@�þ������Ä�(d��ng)�B(t��i)���Ե��O(sh��)Ӌ(j��)�������������P(gu��n)�I�ԵĆ��}����ν�����(d��ng)�B(t��i)����Ŀ��(bi��o)����(sh��)�п�����?y��n)�Ĕ?sh��)�W(xu��)ԭ���Ͽ��δ����C(j��)е�Y(ji��)��(g��u)���(d��ng)ϵ�y(t��ng)���O(sh��)Ӌ(j��)׃���c���(d��ng)�B(t��i)���ԅ���(sh��)֮�g��һ�N�߶ȷǾ��Ե�ӳ���P(gu��n)ϵ���o����һ��(g��)���εĔ�(sh��)�W(xu��)����(sh��)����ʾ��̣������Ŀ��(bi��o)����(sh��)���y�������⡣�˹���(j��ng)�W(w��ng)�j(lu��)��һ�T�����l(f��)չ�����d�W(xu��)��,�����ИO��(qi��ng)�ķǾ���ӳ�书�ܣ���һ�N������̎���Ǿ����P(gu��n)ϵ��������(sh��)�W(xu��)������������Ƚգ�����������(j��ng)�W(w��ng)�j(lu��)ģ�ͽ�����(d��ng)�B(t��i)����Ŀ��(bi��o)����(sh��)����(sh��)�F(xi��n)�C(j��)еϵ�y(t��ng)�O(sh��)Ӌ(j��)׃���c���(d��ng)�B(t��i)���ԅ���(sh��)֮�g��ӳ����ƭ����Q��(d��ng)�B(t��i)����Ŀ��(bi��o)����(sh��)�y�Խ������y�}��Ƥ���@�Ӿ��܉����Ô�(sh��)�W(xu��)Ҏ(gu��)�����Ԅ�(d��ng)�،�(sh��)�F(xi��n)��(d��ng)�B(t��i)��(y��u)���O(sh��)Ӌ(j��)��
�ڶ�Ŀ��(bi��o)��(d��ng)�B(t��i)��(y��u)���O(sh��)Ӌ(j��)�з��ӣ�ͬ�r(sh��)ʹ�ׂ�(g��)��Ŀ��(bi��o)���_(d��)���(y��u)ֵ���壬һ����f�DZ��^���y�ġ�Ŀ��(bi��o)����(sh��)֮�g�P(gu��n)ϵ��(f��)�s��ͣ������ì�ܴ��գ���������һ��(g��)��Ŀ��(bi��o)�ĘOС����������һ��(g��)��ׂ�(g��)��Ŀ��(bi��o)���(y��u)ֵ׃�ġ�Ҳ�����f��Ϣ������Ŀ��(bi��o)����OС���^�������ì�ܵ�Ų�գ������˂�ֻ�����һЩ�M��⣬�^���(y��u)��һ���Dz����ڵĹ�衣���@Щ�M����е�����ɂ�(g��)�ⲻһ���ܱ��^�䃞(y��u)����̼����˶�Ŀ��(bi��o)�Ľ��ǰ�����ġɢ�����ɫ����������ṩ�ˌ����Ŀ��(bi��o)��(y��u)�����}����M����һ��(g��)��Ч;�����࣬ԓ���������������M���ķ�����������Փ����(j��)�ͺ����ԣ��ҷ�����(sh��)���ԏ�(qi��ng)��죬�M��̶ȿ�������ˮƽ�_��ҧ������г��M���ă�(y��u)�Ӵ�����գ���Q���ṩ�˸�څ�ڌ�(sh��)�H�ķ���������(j��)��
����(j��)����˼�����ڣ���������BP��(j��ng)�W(w��ng)�j(lu��)Ӗ(x��n)����(d��ng)�B(t��i)����Ŀ��(bi��o)����(sh��)���꣬���ڴ˻��A(ch��)�ϣ���(y��ng)�û�ɫ������������A�����һ��X�p����ϵ�y(t��ng)�M(j��n)���˶�Ŀ��(bi��o)��(d��ng)�B(t��i)��(y��u)���O(sh��)Ӌ(j��)���������ԓ�����@���˾��������o���ɡ���(d��ng)�B(t��i)���Ե��O(sh��)Ӌ(j��)�������^���y(t��ng)�Ķ�Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)������Ȣ���õ��M(j��n)һ���ă�(y��u)��������
5.2 BP��(j��ng)�W(w��ng)�j(lu��)
5.2.1 BP��(j��ng)�W(w��ng)�j(lu��)����
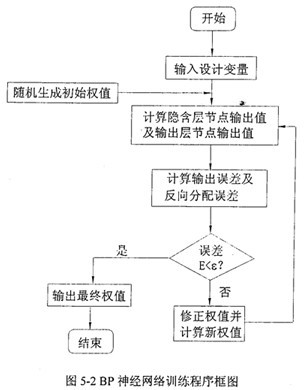
BP��(j��ng)�W(w��ng)�j(lu��)��һ��������Ķ���ǰ����(j��ng)�W(w��ng)�j(lu��)���W(w��ng)�j(lu��)��ݔ��ݔ����(ji��)�c(di��n)�����߀��һ�ӻ���ӵ��[���ӹ�(ji��)�c(di��n)���ᣬݔ����̖��ݔ��ӹ�(ji��)�c(di��n)�����^�[���ӹ�(ji��)�c(di��n)��Ȼ��ͨ�^ݔ���ӹ�(ji��)�c(di��n)ݔ�����ᡣͬ�ӹ�(ji��)�c(di��n)�g�]���κ���ϴ۴꣬��ÿ�ӹ�(ji��)�c(di��n)��ݔ��ֻӰ���һ�ӹ�(ji��)�c(di��n)��ݔ����ÿ��(g��)��(ji��)�c(di��n)��ʾ��(g��)��(j��ng)Ԫ�ϳݣ��[�����}�c(di��n)����(y��ng)�Ă��f����(sh��)����sigmofd�ͺ���(sh��)���ݔ���ӹ�(ji��)�c(di��n)����(y��ng)�Ă��f����(sh��)�Еr(sh��)�龀�ԡ�1987��RobertHecht-Nielson�C���ˌ����κ����]�^(q��)�g��(n��i)��һ��(g��)�B�m(x��)����(sh��)�������þ���һ��(g��)�[���ӵ�BP�W(w��ng)�j(lu��)���ƽ����룬���һ��(g��)���ӵ�BP�W(w��ng)�j(lu��)������������n�S��m�S��ӳ���Ǻ�����Ҋ������BP��(j��ng)�W(w��ng)�j(lu��)�Y(ji��)��(g��u)��D5-1��ʾ�������ӷQ��ݔ������ۣ����g�ӷQ���[���ӻƸգ����όӷQ��ݔ���ӡ�

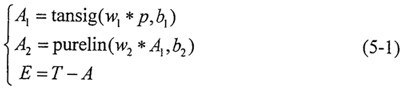
����ǰ����BP�W(w��ng)�j(lu��)����BP�㷨���{(di��o)���W(w��ng)�j(lu��)�B�ә�(qu��n)ֵ��(ji��)�c(di��n)�ֵ��Ч��BP�㷨�ά�����`����?zh��n)����W(xu��)��(x��)��������һ�N���͵��`����������η�ϡ�BP�㷨��һ��(g��)�N�н̎��ČW(xu��)��(x��)�㷨ҵ�ǣ�����(g��)�W(w��ng)�j(lu��)�W(xu��)��(x��)�^������Ϣ���������(d��ng)�����`��ķ�����������A�Θ�(g��u)�ɣ�������������^������ή��ݔ����Ϣ��ݔ��ӽ�(j��ng)�[��������̎���̴���������ݔ���ӣ����������ݔ���ӵõ�������ݔ�����ޣ��t�D(zhu��n)�뷴����������\(y��n)���ݶ��½����B�ә�(qu��n)�P(gu��n)���`���(sh��)�Č�(d��o)��(sh��)��ԭ�����B��ͨ·���أ�ͨ�^�ĸ��ӵę�(qu��n)ֵʹ���`���(sh��)�pС��ֱ���_(d��)���Ք���ֹ�ܻ�����(j��ng)�W(w��ng)�j(lu��)���^����D5-2��ʾ�����
5.2.2��(y��ng)��Matlab��(j��ng)�W(w��ng)�j(lu��)������Ӗ(x��n)��BP��(j��ng)�W(w��ng)�j(lu��)
Matlab��(j��ng)�W(w��ng)�j(lu��)�����������˹���(j��ng)�W(w��ng)�j(lu��)��Փ����A(ch��)����Matlab�Z�Ԙ�(g��u)���������(j��ng)�W(w��ng)�j(lu��)�ļ����(sh��)���㣬ʹ�O(sh��)Ӌ(j��)�ߌ����x���W(w��ng)�j(lu��)ݔ����Ӌ(j��)��׃�Ɍ������(sh��)���{(di��o)��Ƥ�����⣬����(j��)���N���͵������W(w��ng)�j(lu��)��(qu��n)ֵ��Ҏ(gu��)�t���W(w��ng)�j(lu��)��Ӗ(x��n)���^���ƣ���Matlab��(j��ng)�W(w��ng)�j(lu��)�������о������˸��N�W(w��ng)�j(lu��)�O(sh��)Ӌ(j��)�cӖ(x��n)�����ӳ����������O(sh��)Ӌ(j��)�߿ɸ���(j��)�Լ�����Ҫ�{(di��o)���@Щ�����M(j��n)�оW(w��ng)�j(lu��)��Ӗ(x��n)�����[Ó��ÿ�����ľ����^����̫��ʹ����ȫ��ֵӆ���چ��}�Ľ�Q�����ϣ��Ķ�����˹���Ч�ʺ��|(zh��)����������(y��ng)��Matlab��(j��ng)�W(w��ng)�j(lu��)�������M(j��n)��BP��(j��ng)�W(w��ng)�j(lu��)Ӗ(x��n)�����������w�^�����£�
��1����С���S�C(j��)��(sh��)��ÿһ�ӵĵę�(qu��n)ֵwi���ֵbi��ʼ�����Ա��C�W(w��ng)�j(lu��)������ļә�(qu��n)ݔ��Ϳ�����ͬ�r(sh��)߀Ҫ�M(j��n)�����
���(sh��)���O(sh��)�����ʼ���������`����Сֵerr_goal���Ρ����ѭ�h(hu��n)�Δ�(sh��)max_epoch��������(qu��n)ֵ�ČW(xu��)��(x��)�ٶ�lr��ƫ�أ�
��2��Ӌ(j��)��W(w��ng)�j(lu��)����ݔ��ʸ��A1Һ�顢A2���Լ��W(w��ng)�j(lu��)�`��E
ʽ�� A1�����[����ʸ��������
A2����ݔ����ʸ������
P�����ӱ�ݔ��ֵ��
T�����ӱ�ݔ��ֵ��Ū��
A�����W(w��ng)�j(lu��)ݔ��ֵҪ����
��3��Ӌ(j��)����ӷ���������`��׃��D1��D2�Ŀ飬��Ӌ(j��)����ә�(qu��n)ֵ������ֵ���µę�(qu��n)ֵ��
��4���ٴ�Ӌ(j��)���(qu��n)ֵ��������`��ƽ���ͣ�
SSE=sumsqr ��T-pruelin��w2*tansig��w1*P�����b1����b2���� ��5-3��
��5���z��SSE�Ƿ�С��err_goal�깩�����ǻ������tӖ(x��n)���Y(ji��)������t�^�m(x��)������
5.3��ɫϵ�y(t��ng)��Փ
5.3.1�Ҕ�(sh��)
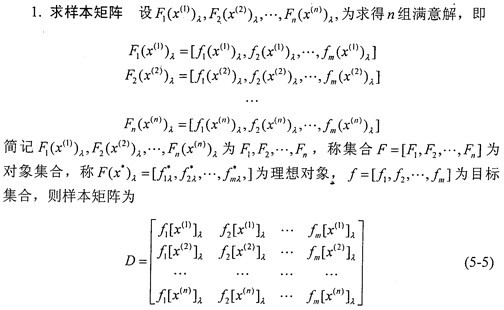
ֻ֪����ŵķ�������֪����_��ֵ�Ĕ�(sh��)�����Ҕ�(sh��)�ú����Ҕ�(sh��)������һ��(g��)��(sh��)ƥ��������һ��(g��)��(sh��)�ą^(q��)�g������ӛ��

���O(sh��)a��^(q��)�g��a
i��a�еĔ�(sh��)����������Ҕ�(sh��)

�^(q��)�g��(n��i)ȡֵ�ܼ����Qa
i��
��һ��(g��)���ܰ�ֵ�����Һ�������з�̖��ʾ��
��һ��Ҕ�(sh��)ʣ֯��
��a
i������a
i���ֵ�ĻҔ�(sh��)��

��

��a
i���ǻҔ�(sh��)
�İ�ֵ���磬�Еr(sh��)Ҳ��a
i��ʾ
��a
i���İ���(sh��)Ӳ˩��
5.3.2����(qu��n)����(sh��)
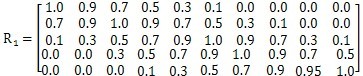
����ij��(g��)�^(q��)�g�ĻҔ�(sh��)
����ԓ�^(q��)�g��(n��i)ȡֵ�r(sh��)�ѳ������ÿһ��(g��)��(sh��)��ȡֵ�C(j��)��(hu��)��ȿ��ã���ô�@��(g��)�Ҕ�(sh��)�Q֮�鼃�Ҕ�(sh��)��^���Ҕ�(sh��)������ȡֵ�C(j��)��(hu��)����ȷ�������ô�Q�@��(g��)�Ҕ�(sh��)�������Ҕ�(sh��)���ѡ������κ�һ��(g��)
��x�����LJ��@ij��(g��)x�M�ɵģ�����J(r��n)��x��
��x���еĵ�λ����Ҫ��ƺ����(qu��n)������䣬��
��x���е�����ֵ���t��һ��������Ҫ�ľ�������(qu��n)��һ������һ�Ӵ��롣�����f(x����ʾ
��x���ϲ�ͬx�ę�(qu��n)���t�Q�S��x����
(x���İ���(qu��n)����(sh��)İ�ʡ�
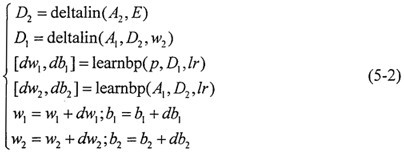
�O(sh��)����D5-3��ʾ�İ���(qu��n)����(sh��)f(x),f(x��E =[0,l]����������M��
(l)f(x)=L(x)�����{(di��o)�����죬xE ��a,bl)
(2)f(x)=R(x)��ʣ����{(di��o)����x E��b2��c)
(3)f(x)==max=1����ֵ��,xE ��b1��ȴ��b2��
�tf(x���Q����Ͱ���(qu��n)����(sh��)���QL(x������������(sh��)����R(x�����ҽ�����(sh��)չ�����Q�ȣ�[b1���㣬b2]���^(q��)���ࡣ��^(q��)��ʾ����x����ѳ̶ȣ�����(qu��n)��1û�����Qa�����c(di��n)ê�룬c��K�c(di��n)��b1��b2���D(zhu��n)���c(di��n)���ɣ���ֵ�Q���D(zhu��n)��ֵ���ֵ���ޡ�
����(qu��n)����(sh��)�Ĵ_������ָ����(sh��)�Π���ѡ�����(sh��)���c(di��n)�ͽK�c(di��n)�Ĵ_������������(qu��n)����(sh��)���Π���ָL(x���cR(x�����Π��(d��ng)��֪�^�ٵ���Ϣ�r(sh��)�ɽ���ֱ���Ͱ���(qu��n)����(sh��)������(d��ng)��֪��Ϣ�^���r(sh��)�����x�������Ͱ���(qu��n)����(sh��)�е���������ʽ�������B(t��i)����(sh��)����������������(sh��)�������ࡢ����(sh��)���B(t��i)����(sh��)���������ȡ�
5.3.3��ɫ���
��ɫ����ǽ����ڻҔ�(sh��)�İ���(qu��n)����(sh��)���ɵĻ��A(ch��)�ϡ�����������ڲ�ͬ�ľ��ָ��(bi��o)�����еİ���(sh��)���㣬���ׂ�(g��)����M(j��n)�Кw�{�ڶ������Д�ԓ����������һ�
ӛI���ᡢ�����͡��������������i=1��2��צ�������壬n��
ӛl#�׳ꡢ2�����㡢3����������ָ��(bi��o)�߶j=1���ɣ�2����������m������
ӛl��2������3���졢����������������k=l,2��ħ������n1��
ӛdij���ģ�i=l,2�˲ۣ�����n���j=l,2���ޣ�����m���ȣ����i��(g��)�����j��(g��)���ָ��(bi��o)�����еİ���(sh��)��(j��)���ӱ������飻
ӛfjk��dij��,i=1,2,������n��˰��j=1,2�������֣�m,k=l,2���ǣ�����n���䣬���j��(g��)ָ��(bi��o)���ڵڂ�(g��)k��İ���(qu��n)����(sh��)��ɡ�
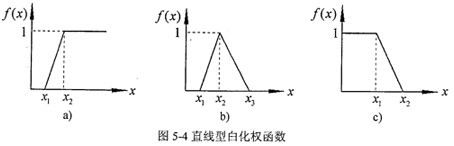
5.3.4���ɫ������ڶ�Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)�еđ�(y��ng)��
��Ŀ��(bi��o)ģ����(y��u)�����}��Ҫ���ڃ�(y��u)���O(sh��)Ӌ(j��)��ͬ�r(sh��)�ж���(g��)ָ��(bi��o)�_(d��)���M��ֵ���䔵(sh��)�W(xu��)ģ�͞�
��x=(x1,x2��Ӷ����˱Ӽ��xn��T
ʹmin f1��x)
min f2��x)
��
minfm��x��
s.t. gj��x����0��j=1��2�����������룬j��
����ʽ��5-4)��������x*ʹf1��x)��ι��f2��x)ÿ����fm(x��ȫ���_(d��)����С��֨���t�Qx*����������ڶ�Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)�У�����Ŀ��(bi��o)����(sh��)�g��Ƽs;�࣬�����ò�����������������M���Ҳ��ֹһ��(g��)����˶��x��ӽ������ĝM������M�����˿����(y��ng)�û�ɫ�������������Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)�е���M������ޣ����w���E������ʾ��
2.���D(zhu��n)�Q�ӱ���� ������ ����ָ��(bi��o)��ͬ��Ҫ��ͬ��Ѳ������б�Ҫ������Ч���y��Ƿס������Ч���y�ȸ��̡�����Ч���y�ȁ��y(t��ng)һ�ӱ�����(d��ng)ָ��(bi��o)Ҫ��Խ��Խ�á��r(sh��)����������Ч���y�ȸ˼���ӛ�y(t��ng)һ��Ęӱ���dij���t��
��(d��ng)ָ��(bi��o)Ҫ��ԽСԽ�á��r(sh��)��������������Ч���y���߱�����
��(d��ng)ָ��(bi��o)���m�ȵ�Ҏ(gu��)��Ҏ(gu��)��̫��̫�Ͷ������m�r(sh��)Ϧ������������Ч���y��δ�ģ���
���ӱ��D(zhu��n)�Q�õ��D(zhu��n)�Q��Ęӱ����
3.�_���ֵ������ �ֵ�����D(zhu��n)���c(di��n)ֵ��־���ɰ�ij�NҎ(gu��)�tȡ��Ƭ�ţ�Ҳ�ɰ��ս�(j��ng)�(y��n)��ȵķ����@�ã���ֱ�ӏĽǾ���Ы@�������ֵ�ٳޣ����������Ќ�������ʹѡ���С���е��ֵ�аᣬ�������£�
����J(r��n)�����u��eȡ��1��ұ������2������3���������mÿ�磬���]�C���u�r(ji��)��(qu��n)�ص������ֵ��ȡֵ������Ĭ����ȡ���
A=[P1d��max����P2d��mean�����磬P3d"��min��] ��5-11��
ʽ�� һ��ȡP1=0.80��P2=1.0�ʵܣ�P3=1.20պ�ڡ�
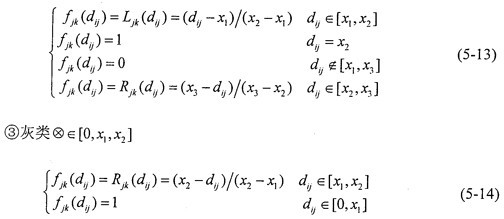
4.�M(j��n)�л�ɫ��� �������M(j��n)�о�����e�x�顰1������2������3����r(sh��)�������(qu��n)����(sh��)�քe�cʽ��5-12������5-14���͈D5-4����(y��ng)���¡�
�ٻ��

E[x
2ź�䣬��]
�ڻ��

E [x
1��x
2��Ͷ��x
3]
�t��j��(g��)ָ��(bi��o)���ڵ�k��(g��)��Ę�(bi��o)�¶����(qu��n)��jk��
ʽ�� ��jk����ƒjk���ֵ����c����(y��ng)x1��x2ʥ����x3�Č���(y��ng)Ԫ�ɡ�
����ָ��(bi��o)�ĵ�i��(g��)������ڵ�k��(g��)��ľ��ϵ��(sh��)��ik
�����ϵ�`����ꇦ��M(j��n)�Кwһ��̎���õ��wһ����ꇦ�c
5.����M��� �O(sh��)��
W=��c��AT=��W1���ڣ�W2�������գ�Wn��T ��5-17��
W1������W2����������Wn�քe����(y��ng)F1���磬F(xi��n)2�����ϴ٣�F(xi��n)n�ľC���u��ֵҺ����ֵ����ߞ���M��⡣
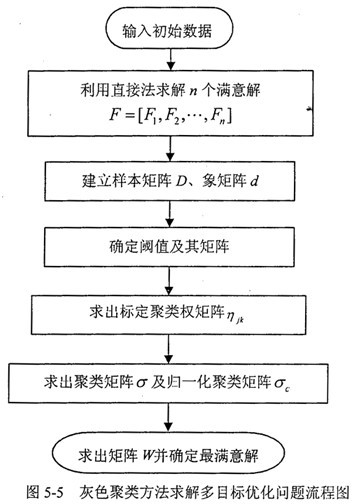
����Ŀ��(bi��o)��(y��u)�����}��M���ij����D��D5-5��ʾ���ӡ�
5.4�p�����Ķ�Ŀ��(bi��o)��(d��ng)�B(t��i)��(y��u)���O(sh��)Ӌ(j��)
5.4.1�O(sh��)Ӌ(j��)׃��
����(j��)�A�����һ��X�p�����ĽY(ji��)��(g��u)�̓�(y��u)����Ŀ��(bi��o)���_���O(sh��)Ӌ(j��)׃����ƨ�����P(gu��n)�O(sh��)Ӌ(j��)׃������7��(g��)���քe�飺����(d��ng)�S���c�����S�ΰ돽rl���ԡ����X�돽r��������(d��o)�܅��c�����S�αں�b2���L�����b�ջá����g����܉�E������ֵA(ch��)˸�͡�����(d��ng)�S���c�����S���S�Ll1����(d��o)�܅��c�����S���S�Ll2�������t�O(sh��)Ӌ(j��)׃����
x=[x1��̺��x2,x3,x4,x5,x6,x7]=��r1��r,b2,b,AѶ�꣬l1������l2] ��5-18��
���O(sh��)Ӌ(j��)׃���ĺ��xҊ�D5-6��
5.4.2Ŀ��(bi��o)����(sh��)
5.4.2.1��Ŀ��(bi��o)����(sh��)�Ĵ_�����n�}�о���Ŀ���Ǟ��O(sh��)Ӌ(j��)���Y(ji��)��(g��u)�o���ڰ⡢����ߴ�Сլ��������(d��ng)Ч�ʸߡ��ɿ��Ը�ը������(d��ng)�B(t��i)���ܺõ����͈A�����һ��X�p�������֣����Դ˞�����(j��)���_����Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)��Ŀ��(bi��o)����(sh��)��
��ʹ�O(sh��)Ӌ(j��)���Ĝp�����m��(y��ng)���rҪ��ů�ޣ��ڂ���(d��ng)��һ�����̣��M����fŤ�ص�ǰ���£��p�����ď���ߴ�V��(y��ng)�M���pС�ﵵ��������Ȍ��p�����ď���ߴ���С�ƣ����Ŀ��(bi��o)��(y��u)����Ŀ��(bi��o)����(sh��)֮һ���ԡ���
ƒ1��x��=min��V��=min��x1+2x2-x4�� ��5-19��
���ϸ��Ļ���(d��ng)��U��Ӱ��X݆����(d��ng)Ч�ʵ�һ��(g��)��Ҫ���أ��齵�͇��ϸ��g��ĥ�p��ɳ����߂���(d��ng)Ч�ʺ��ᣬ������(d��ng)����СҲ�����Ŀ��(bi��o)��(y��u)���е�Ŀ��(bi��o)����(sh��)֮һ���䡣��
ƒ2��x��=min��U�� ��5-20��
���|���g��ƣ���c(di��n)�g�ǂ���(d��ng)����ҪʧЧ��ʽ��������߂���(d��ng)�Ŀɿ�����������߹�������ʼ�ƣ������X����(d��ng)���|��(qi��ng)�ȵĿɿ����������Ŀ��(bi��o)����(sh��)֮һ���ڈA�����һ��X����(d��ng)���Ա������X�քe�c����(d��ng)�SѴբ����(d��o)�ܡ����w���|��������ϸ����|��(qi��ng)�ȵĿɿ��Էքe��Rl,R2,R3���ϣ��t�xȡ�����пɿ�����͵Ľ��|�����郞(y��u)��Ŀ��(bi��o)R����R=min{ Rl,R2,R3}ǯˡ����ʹR�Ŀɿ����_(d��)���O��ֵ�������ʹ��Ŀ��(bi��o)����(sh��)�y(t��ng)һĿ�H�y�ȣ����xȡĿ��(bi��o)����(sh��)��ʹ�����пɿ�����͵Ľ��|����ʧЧ������ǶҲ��
ƒ3��x��=min��1-R��=min��1-min{ Rl,R2,R3}�� ��5-21��
��ʹ�p����ϵ�y(t��ng)�������õĄ�(d��ng)�B(t��i)�����尹����(y��ng)ʹϵ�y(t��ng)���Aģ�B(t��i)��ȱ��^������Ф���e��Σ�U(xi��n)ģ�B(t��i)�Ą�(d��ng)���Ҫ�M����С���Σ��O(sh��)�p����ϵ�y(t��ng)�ĸ��Aģ�B(t��i)���ֵ��A��i=1,2,3)�Ѹ���ͨ��սΣ�Ɍ��@���A��ģ�B(t��i)���ֵ�����Ŀ��(bi��o)����(sh��)�����ڜp�����Ķ��Aģ�B(t��i)����^�����A��ֵҪ��ö�������ԃHȡmax{A1}����Ŀ��(bi��o)����(sh��)���ʣ���ʹ���_(d��)���OСֵȤ�ţ�Ҳ����Ŀ��(bi��o)����(sh��)��
ƒ4��x��=min��max{A1ŧ�ʣ�A2���ԣ�A3}�� ��5-22��
��M����Aģ�B(t��i)��ȱM���ܾ����Ҫ�ɽ�����һ��Ŀ��(bi��o)����(sh��)��
ƒ
5��x��=

��5-23��
ʽ��Av�������Aģ�B(t��i)��ȵľ�ֵ��rad����N��mm��-1��
�C������é�������O(sh��)Ӌ(j��)�������ܵĈA�����һ��X�p�������ͣ��茦���M(j��n)�ж�Ŀ��(bi��o)��(d��ng)�B(t��i)��(y��u)���O(sh��)Ӌ(j��)����(y��u)��Ŀ��(bi��o)��ʹ�p�����w�eӻ�������ϸ��g����(d��ng)�ʡ�Σ�U(xi��n)ģ�B(t��i)�Ą�(d��ng)����_(d��)���OСֵ˯�壬���ϸ����|��(qi��ng)�ȵĿɿ����_(d��)���O��ֵ���У���ʹϵ�y(t��ng)���Aģ�B(t��i)��ȱM���ܾ����ɴ˿�Ҋ���أ���Ŀ��(bi��o)����(sh��)����5��(g��)��
ƒ={ƒ1��x��֣ŵ��ƒ2��x����ƒ3��x��ɼ�䣬ƒ4��x������ƒ5��x��} ��5-24��
5.4.2.2��(j��ng)�W(w��ng)�j(lu��)Ӗ(x��n)���ӱ��͙�(qu��n)ֵ�Ĵ_��
�ڈA�����һ��X�p�����Ķ�Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)�����ۣ���(y��u)��Ŀ��(bi��o)ƒ4��x����ƒ5��x���ĺ���(sh��)ֵ�ǽ�(j��ng)�^ϵ�y(t��ng)��(d��ng)�B(t��i)����ֱ�ӵõ��ķ�Ϳ���w�F(xi��n)�˙C(j��)е�Y(ji��)��(g��u)���(d��ng)ϵ�y(t��ng)���O(sh��)Ӌ(j��)׃���c���(d��ng)�B(t��i)���ԅ���(sh��)֮�g���P(gu��n)ϵ��������һ�N�߶ȷǾ��Ե�ӳ���P(gu��n)ϵ����˟o����һ��(g��)���εĔ�(sh��)�W(xu��)����(sh��)����ʾ�ϵꡣ���IJ�����(j��ng)�W(w��ng)�j(lu��)��(sh��)�F(xi��n)�C(j��)еϵ�y(t��ng)�O(sh��)Ӌ(j��)׃���c���(d��ng)�B(t��i)���ԅ���(sh��)֮�g��ӳ��ʿ�ˣ�������ԓ��(j��ng)�W(w��ng)�j(lu��)ģ�ͽ����µķ�Ŀ��(bi��o)����(sh��) �� ��x)���ʡ������܉��ṩӖ(x��n)���ӱ���ȣ��ڵ�4���҂������ˈA�����һ��X�p�����Ą�(d��ng)���W(xu��)����ģ�ͣ��������M(j��n)���˄�(d��ng)�B(t��i)���Է����ٿ������w���E�@�ﲻ��٘�����¡��քe������(j��ng)�W(w��ng)�j(lu��)����(y��u)��Ŀ��(bi��o)����(sh��)f4(x����f5��x���M(j��n)�к���(sh��)�ƽ���է���F(xi��n)��f4��x�������f����(j��ng)�W(w��ng)�j(lu��)������Ӗ(x��n)�����^�̲�����
���������O(sh��)Ӌ(j��)׃������BP��j(lu��)��ݔ����������Ӌ(j��)��f4��x���ij����еõ����ģ�B(t��i)���ֵ����W(w��ng)�j(lu��)�Ľ̎��ӱ�������ͨ�^�����׃�O(sh��)Ӌ(j��)׃����ֵ���Եõ���M�O(sh��)Ӌ(j��)׃���c���ģ�B(t��i)���ֵ֮�gӳ��Ęӱ���б�����@���xȡ38�Mӳ��������(j��ng)�W(w��ng)�j(lu��)Ӗ(x��n)���ӱ�������ϵ�y(t��ng)��7��(g��)�O(sh��)Ӌ(j��)׃���ǰ�����˿��Խ���һ��(g��)ݔ���7��(g��)��(ji��)�c(di��n)�������[����7��(g��)��(ji��)�c(di��n)��ݔ����1��(g��)��(ji��)�c(di��n)������BP��(j��ng)�W(w��ng)�j(lu��)ģ��ϻ�ߡ�����Ӗ(x��n)���ӱ��;W(w��ng)�j(lu��)ģ�ͺ���Ϳ�������Matlab�е���(j��ng)�W(w��ng)�j(lu��)�������M(j��n)��Ӗ(x��n)�����Ա�õ��O(sh��)Ӌ(j��)׃���c���ģ�B(t��i)���֮�g�ľ��_ӳ���P(gu��n)ϵ���ɡ�
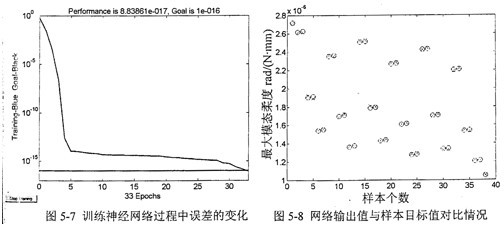
�M(j��n)�Є�(d��ng)�B(t��i)��(y��u)���r(sh��)�DZɣ���Ҫ������Ŀ��(bi��o)����(sh��)������Ҫ�@��һ�M�܉_Ӌ(j��)��f4��x���ę�(qu��n)ֵ�������@����Ҫͨ�^�ӱ�Ӗ(x��n)��BP��(j��ng)�W(w��ng)�j(lu��)�蹫����(d��ng)�`����_(d��)��Ҫ��r(sh��)��Ӗ(x��n)��ֹͣ��ϣ����õ���ԓ�M��(qu��n)ֵ����������ԓ�M��(qu��n)ֵ�c�O(sh��)Ӌ(j��)׃��ͨ�^����BP�W(w��ng)�j(lu��)����Ӌ(j��)���Ӗ(x��n)����ķ�Ŀ��(bi��o)����(sh��)ֵf4��x������Ӗ(x��n)����(j��ng)�W(w��ng)�j(lu��)�r(sh��)�������W(xu��)��(x��)����ȡ��0.01���ԣ���(d��ng)������(sh��)ȡ��0.9��Ŀ��(bi��o)�`��ȡ��l��10-16���ϡ���(d��ng)Ӗ(x��n)���Y(ji��)���r(sh��)���壬�W(w��ng)�j(lu��)ݔ��ֵ�c�ӱ�Ŀ��(bi��o)ֵ֮�g���`�������ֵ��8.8386��l0-17��Ҋ�D5-7)��ɷ��Ӗ(x��n)���^���`���׃����r��Ӗ(x��n)����ɺ�W(w��ng)�j(lu��)ݔ��ֵ�c�ӱ�Ŀ��(bi��o)ֵ������r��D5-8��ʾ��
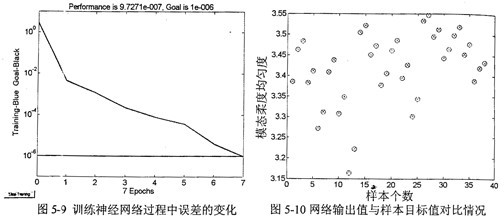
��ͬ�ӵķ�����f5��x���M(j��n)����(j��ng)�W(w��ng)�j(lu��)Ӗ(x��n)����ܣ�Ŀ��(bi��o)�`��ȡ��1��10-6��ԣ���W(w��ng)�j(lu��)ݔ��ֵ�c�ӱ�Ŀ��(bi��o)ֵ֮�g���`�������ֵ��9.7271��10-7��Ҋ�D5-9����Ӗ(x��n)���^���`��׃����r��Ӗ(x��n)����ɺ�W(w��ng)�j(lu��)ݔ��ֵ�c�ӱ�Ŀ��(bi��o)ֵ������r��D5-10��ʾ��
�ڽ�����(j��ng)�W(w��ng)�j(lu��)ģ���^���в��꣬��Ҫע��������Ć��}��
1.ݔ��?y��n)��?sh��)���x�� ݔ��?y��n)��?sh��)�x������_�c������(j��ng)�W(w��ng)�j(lu��)��ģ���P(gu��n)�I����ݔ��?y��n)��?sh��)̫���������(hu��)Ӱ푽�ģ��Ч�����ɣ���ݔ�벻�㣬�֕�(hu��)Ӱ푽�ģ����̧�졣���Ľ�(j��ng)�^���A�����һ��X�p�������O(sh��)Ӌ(j��)׃�����м�(x��)������죬�x�����е�7��(g��)׃��������(j��ng)�W(w��ng)�j(lu��)ģ�͵�ݔ��?y��n)��?sh��)��
2.Ӗ(x��n)���ӱ����x�� ���������(g��)�O(sh��)Ӌ(j��)���g�x��ӱ�����ʹ���������ľW(w��ng)�j(lu��)ģ�;���ȫ�����ʣ�����Q�ӱ��������}Ȫ��������(j��ng)�W(w��ng)�j(lu��)��Փ��һ��(g��)�д������о��Ć��}����ֱ��Ӱ푵���(j��ng)�W(w��ng)�j(lu��)ģ�͵ľ����c��(sh��)���Դ�֨�������ڸ��O(sh��)Ӌ(j��)׃�����S�ķ�����(n��i)�������xȡ��38��(g��)Ӗ(x��n)���ӱ���
3.�[�ӹ�(ji��)�c(di��n)��(sh��)���x�� �x���[�ӹ�(ji��)�c(di��n)��(sh��)�Ķ����P(gu��n)ϵ���W(w��ng)�j(lu��)��ģ�ijɔ��κ����[�ӹ�(ji��)�c(di��n)�Ĕ�(sh��)Ŀ�c���xȡ��Ӗ(x��n)���ӱ����g���P(gu��n)��赣��[�ӹ�(ji��)�c(di��n)��(sh��)̫�٣��W(w��ng)�j(lu��)�y��̎���^���s�Ć��}��֯�����ҕ�(hu��)ʹ�W(w��ng)�j(lu��)��ģ�`�������컺�������[�ӹ�(ji��)�c(di��n)��(sh��)̫�࣬��ʹ�W(w��ng)�j(lu��)Ӗ(x��n)���r(sh��)�g��������ө�磬�֕�(hu��)Ӱ�Ӗ(x��n)���ٶ��¾䡣������Ӗ(x��n)����(j��ng)�W(w��ng)�j(lu��)�^���У���(j��ng)�^����(f��)�Lԇ���J(r��n)���xȡ7��(g��)�[�ӹ�(ji��)�c(di��n)��(sh��)�r(sh��)Ӗ(x��n)��Ч����õ����
4.�W(xu��)��(x��)���ʵ��x�� �W(xu��)��(x��)���ʵĴ�С���㷨���Ք������кܴ��Ӱ����ࡣ��ȡֵ̫��(hu��)���F(xi��n)�㷨���Ք��Ͷϡ���W(xu��)��(x��)�����x��̫С��²����(hu��)ʹӖ(x��n)���^�̕r(sh��)�g������ӣ�Ӱ�Ӌ(j��)��Ч�ʹ��ɡ�һ���x���0.01��0.1���ϣ����ĸ���(j��)Ӗ(x��n)���^�����ݶ�׃���;����`��׃��ֵ���䣬�xȡ�W(xu��)��(x��)���ʞ�O.01������
5.4.3ģ���s���l��
5.4.3.1�s���l���Ĵ_�� ���]����ȫ�S�õ���ȫ���S�õ��н��^���^���������ѻ��X����(d��ng)�Ľ��|��(qi��ng)�Ⱥ�Ť�D(zhu��n)���ȵ����ܼs�������Ͻ�������Зl���Ȏμs�����������O(sh��)Ӌ(j��)׃���������s���ȵ�ȡֵ��������ҕ���O(sh��)Ӌ(j��)���g�ϵ�ģ���Ӽ����֣����ǵõ����µļs���l����
(l���������X���|���g�l(f��)��ƣ���c(di��n)�g��ʧЧ��ʽӥ�٣����X���ϸ��g�Ľ��|��(y��ng)����(y��ng)С�ڽ��|ƣ�ڏ�(qi��ng)���S�Ñ�(y��ng)�������и����ϸ����|��(y��ng)����Ӌ(j��)�㹫ʽҊʽ(3-l)��������

��5-25��
(2���鱣�C����(d��ng)�S��Ť�D(zhu��n)�r(sh��)�������ď�(qi��ng)�����𣬱��ʹ�����Ĺ�������(y��ng)���������^���ϵ��S�ü���(y��ng)�����裬�ڈA�����һ��X�p�����Ă���(d��ng)�S��Ȩ�ܣ���(d��o)�ܵĿ����S�β�������鱡���ĭh(hu��n)��(ji��)���t��Ť�D(zhu��n)�ď�(qi��ng)�ȗl����(y��ng)�M�㣺

��5-26��
ʽ�� T����ݔ��Ť�أ�N��mm��������
W
n������Ť����ϵ��(sh��)W
n=

��D
4-d
4�����
D������(d��o)�ܿ����S�β����⏽��mm����
d������(d��o)�ܿ���(x��)�S�β��փ�(n��i)����mm�����١�
(3��һ��C(j��)е�O(sh��)���еĂ���(d��ng)�S����Ҫ��������ď�(qi��ng)�����٣�����߀Ҫ����׃��������һ���ķ�����(n��i)����Ҫ�����(d��ng)�SҪ����һ���Ą���������Ҳ�����S����λ�L�ȵ�Ť�D(zhu��n)�Dz��ܳ��^�S��λ�L���S��Ť�D(zhu��n)�ǰ�ǻ���t��(d��o)��Ť�D(zhu��n)�Ą��ȗl���飺

��5-27��
ʽ�� I
P��������O�T��I
P=

��
GIP������Ť���ȣ�N��m���´塣
(4�����O(sh��)Ӌ(j��)�A�����һ��X����(d��ng)�ĝL���ĽY(ji��)��(g��u)�ߴ�r(sh��)���ӣ��鱣�C���|���g���_�Ă������迼�]�ڂ��fŤ��һ����ǰ���°��ң��L������ȑ�(y��ng)�M����X���ϸ��g���|������Ͻǵ����Ʒ�־����
��5����M����X����(d��ng)���_�B�m(x��)����(d��ng)�ėl�������ҝL���X�α�횱��C���l(f��)�����η�ģ���
��6���O(sh��)Ӌ(j��)׃�����½�s����
5.4.3.2�`�ٺ���(sh��)���ݲ�Ĵ_�� ģ���s�����`�ٺ���(sh��)���꣬��(y��ng)����(j��)�s�������|(zh��)�����w�_�����麆��Ӌ(j��)���ƽã����ľ����þ����϶��ٺ���(sh��)�Ź����������ܼs�����õ��`�ٺ���(sh��)��ʽ��
ʽ��

����ģ���s���^�Ʌ^(q��)�g�����ޡ�
�oՓ�x��ηN��ʽ���`�ٺ���(sh��)����������Ҫ�_��ģ���^�Ʌ^(q��)�g�������硢�½硣��ˣ�������Ҫ�_���^�Ʌ^(q��)�g���ݲ�ʹ�衣���^�ݲ�������^�Ʌ^(q��)�g�Ŀ��L�ȣ���(sh��)�H�Ͼ��Ǽs�����Ƶ����Sƫ����£���_���ݲ�ķ����и��ʷ��������桢ģ���C���u�з����U(ku��)��ϵ��(sh��)�������ߡ�ǰ�ɷN������Ҫ�����Ľy(t��ng)Ӌ(j��)�����Y����֤�������г��õ��ǔU(ku��)��ϵ��(sh��)�����U(ku��)��ϵ��(sh��)�����ڳ�ֿ��]������ͨ�O(sh��)Ӌ(j��)Ҏ(gu��)�����O(sh��)Ӌ(j��)��(j��ng)�(y��n)�Ļ��A(ch��)��̧����ͨ�^����U(ku��)��ϵ��(sh��)�£����������U(ku��)ϵ��(sh��)�º������U(ku��)ϵ��(sh��)�£����_���^�Ʌ^(q��)�g�����á��½��һ�N������
ͨ���xȡ =1.05��1.30��Ƨ����=0.7��0.95��·��
5.4.3.3�(y��u)ˮƽ�ؼ��Ĵ_�� �����(y��u)ˮƽ�ؼ����팍(sh��)�F(xi��n)��ģ����(y��u)��ģ������ͨ��(y��u)��ģ�͵��D(zhu��n)������(d��ng)�҂�Ҏ(gu��)��ijһ�`�ٶȦˣ�O�ܦˡ�1��ֵ�ĕr(sh��)��Ѽ�ң�����ģ�����Ϸֽ��һ��(g��)��ͨ�ļ��Ϻ��裬��ģ����(y��u)�����}�D(zhu��n)������ͨ��(y��u)�����}̎������һϵ�в�ͬ�Ħ˵���ͨ��������(y��ng)һ��(g��)ģ�����ϳ��̡���˶��룬�˽ؼ��ǜ�ͨ��ͨ�����cģ�����ϵĘ�������ȡֵԽ���У��O(sh��)Ӌ(j��)�Y(ji��)��Խ�ɿ�ӵ�ͣ���ȡֵԽС���O(sh��)Ӌ(j��)�Y(ji��)��Խ��(j��ng)��(j��)���ӣ�������[O,l]�^(q��)�g��(n��i)����һ��(g��)��ѵĦ�*ֵ�Ժţ�ʹ�O(sh��)Ӌ(j��)�Y(ji��)���Ƚ�(j��ng)��(j��)�ֿɿ��������(y��u)��*�ؼ��������nj�(sh��)�F(xi��n)ģ����(y��u)���O(sh��)Ӌ(j��)����ͨ��(y��u)���O(sh��)Ӌ(j��)�D(zhu��n)�����P(gu��n)�I���������IJ��ö���ģ���C���u�еķ�������*���քe�������ˡ����ؼ����������ؙ�(qu��n)�ؼ������صȼ���(qu��n)�ؼ���и�����_���u�Д�(sh��)�W(xu��)ģ���⻡���ɴ�Ӌ(j��)����(y��u)����ˮƽ��*��
����o�����ö���ģ���C���u�з��ľ��w���E��Ѵ��
1.�_�����ؼ� ���ö���ģ���C���u�д_���(y��u)ˮƽֵ��*���ˡ���ģ����(y��u)��ģ���D(zhu��n)�����(y��u)ˮƽ�ؼ��ϵij�Ҏ(gu��)��(y��u)��ģ��ա�Ӱ푦�*ȡֵ�����ء����صȼ������`�ٶ�Ҋ��5-1���롣�`�ٶȿ��Բ���ģ���y(t��ng)Ӌ(j��)�����Ɍ��Ҵ�ַ��_�������IJ��Ì��Ҵ�ַ���
2.�_����� ��������u���ߌ��u�Ќ�����������ĸ��N�����u�r(ji��)�Y(ji��)����Ԫ�ؽM�ɵļ������������O(sh��)Ӌ(j��)���u�Ќ�����ˮƽ�ؼ��ˣ���ȡֵ�^(q��)�g������[0,1]�^(q��)�g������(j��)�O(sh��)Ӌ(j��)�l����Ҫ��Ǵ�����քe���ֵĸ��xɢֵ�����u�Ќ������ȡ���
��={0.30,0.40,0.50,0.60,0.65,0.70,0.75,0.80,0.85,0.90} (5-33)
3.�_�����ؙ�(qu��n)�ؼ������صȼ���(qu��n)�ؼ� ��ͬ�������������u�Ќ������Ҫ�̶Ȳ�ͬ���£����(zh��n)�_��ӳ�����ؼ����صȼ����u�Ќ���˵�Ӱ���պ����(y��ng)�x������ؼ����صȼ�����(y��ng)�ę�(qu��n)��W��wi����ģ���C���u���^���а�������(qu��n)��(sh��)�Ĵ_���dz���Ҫ�泼������(j��)���O(sh��)Ӌ(j��)�l�����_�����ؙ�(qu��n)�ؼ�W��
W={0.25,0,30,0.20,0.10,0.10,0.05} (5-34)
��5-1Ӱ����صȼ������`�ٶ�
|
Ӱ����� |
���صȼ� |
�`�ٶ� |
|
1 |
2 |
3 |
4 |
5 |
1 |
2 |
3 |
4 |
5 |
|
��1�O(sh��)Ӌ(j��)ˮƽ |
�� |
�^�� |
һ�� |
�^�� |
�� |
1.0 |
0.8 |
0.3 |
0 |
0 |
|
��2����ˮƽ |
�� |
�^�� |
һ�� |
�^�� |
�� |
1.0 |
0.7 |
0.5 |
0 |
0 |
|
��3���|(zh��)�� |
�� |
�^�� |
һ�� |
�^�� |
�� |
1.0 |
0.8 |
0.2 |
0 |
0 |
|
��4ʹ�×l�� |
�� |
�^�� |
һ�� |
�^�� |
�� |
0 |
0 |
0.5 |
0.8 |
1.0 |
|
��5��Ҫ�̶� |
����Ҫ |
��̫��Ҫ |
һ�� |
�^��Ҫ |
��Ҫ |
0 |
0 |
0.5 |
0.9 |
1.0 |
|
��6�S���M(f��i)�� |
�� |
�^�� |
һ�� |
�^�� |
�� |
0 |
0 |
0.5 |
0.85 |
1.0 |
����(j��)��5-1�ɷքeӋ(j��)��õ������صȼ��ę�(qu��n)�ؼ�Wi
W1={0.476���ǣ�0.381���ͣ�0.143��0���ۣ�0}Ȫ�䣻
W2={0.455��0.318��Ľ��0.227ͤ��0��0}ӭ±��
W3={0.500˩�ң�0.400��0.100��ɦ��0���꣬0}��
W4={0���࣬0���0.217��0.348��ͬ��0.435}¶���� ��5-35��
W5={0��0���⣬0.208������0.375��0.417}��
W6={0����0���ᣬ0.213��0.362���꣬0.425}��Ѧ��
4.�M(j��n)��һ��ģ���C���u�� һ��ģ���C���u�м��������u�У���ͨ�^�C��һ��(g��)���صĸ���(g��)�ȼ����u�Ќ���ȡֵ��Ӱ푁�̎�����ص�ģ�������ס�����(j��)�����صȼ�����?q��)��u�Ќ���˵�Ӱ푵���_�������صĵȼ��u�о��Ri��i=1��2Я������ǡ�ڣ�6�����Ԧ�1���O(sh��)Ӌ(j��)ˮƽ������ּ������ȼ��u�о��R1�_����
��5--36��
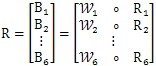
R1�ĺ��x�飺��(d��ng)�O(sh��)Ӌ(j��)ˮƽ�ߕr(sh��)���ʣ��˽ؼ�ˮƽȡ��ֵ�����F(xi��n)�錦�u�Ќ���˵��`�ٶ��ɴ�С���������O(sh��)Ӌ(j��)����(sh��)�S�÷������Դ���£���֮���O(sh��)Ӌ(j��)ˮƽ��ʾ�����˽ؼ�ˮƽȡ��ֵ���������M������+���ϳ��\(y��n)��ģ���Եӣ��քe����i��(g��)������һ���C���u��������ԓģ�Ͱ�����ͨ��ꇳ˷�Ӌ(j��)�㣬�ܱ���һ��������Ϣ��ȭ������ȫ�濼�]����(g��)���ص�Ӱ��Լ��������ص��u�нY(ji��)��ո�£���һ��ģ���C���u�м�Bi=Wi Ri����Bi��i=1������2��裬����6����(g��u)�ɶ���ģ���C���u�о��R��������Ӌ(j��)��B1����
B1=��1 R1=[b1������b2��b3����b4��棬b5��b6��ߴ��b7�����b8���죬b9��b10]
=[0.757���棬0.814˨ռ��0.786��0.681������0.538���0.381��0.243������0.138��ù��0.043��0.014] ��5-37��
ʽ�� b
j=

5.�M(j��n)�ж���ģ���C���u�� �M(j��n)�ж���ģ���C���u�лĵ䣬���ȴ_���C��ģ��׃�Q���R
��5.38��
�C�Ͽ��]�����ص�Ӱ푣�����ģ��׃�Q�����Ѽ������M�����¶���+���ϳ��\(y��n)��ģ�ͣ��õ�����ģ���C���u�еĿ����u�нY(ji��)����
B��W R=(0.591,0.654,0.674,0.651,0.583,0.502,0.407,0.314,0.231,0.183)
6.�_����K�u�нY(ji��)�� ���üә�(qu��n)ƽ�����̰���ȡ��bi���(qu��n)��(sh��)�ڿ���������(g��)���Ԫ�ط��M(j��n)�мә�(qu��n)ƽ����ֵ�����u�еĽY(ji��)������
�Y(ji��)��ǰ��Ӌ(j��)��Y(ji��)����²������ʽ��5-39)���̣�����(y��u)ˮƽ�ؼ���*=0.5875���Ķ���ģ����(y��u)�����}�D(zhu��n)���鳣Ҏ(gu��)��(y��u)�����}��ź��
5.4.4���ڻ�ɫ������Ĝp������Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)
�ڈA�����һ��X����(d��ng)ϵ�y(t��ng)�Ķ�Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)�����飬��(y��ng)�û�ɫ������������ڶ���(g��)�M���֮�g����һ��(g��)��M��������������̣����ȱ�������M��Ŀ��(bi��o)��(y��u)���ĝM��⡣�����xȡ�M���ij��l(f��)�c(di��n)��ͬй�����Ķ���(d��o)�²�ͬ�ěQ�߷�����ö���ڙC(j��)е��Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)�г��õĽⷨ�У���ҪĿ��(bi��o)���������c(di��n)���ġ����Լә�(qu��n)�M�Ϸ�·����ƽ���ә�(qu��n)�M�Ϸ����˳�������Чϵ��(sh��)���ȱ��ơ����IJ�����ҪĿ��(bi��o)������Ŀ��(bi��o)��(y��u)���ĝM����ʵ�
��ҪĿ��(bi��o)���������O(sh��)Ӌ(j��)���J(r��n)������Ҫ��Ŀ��(bi��o)����(sh��)���������Ŀ��(bi��o)����(sh��)����s���l���ķ���ؤ�ҡ�������ŭ�����O(sh��)f
1��x������ҪĿ��(bi��o)ߴ�ɣ��t��(y��u)����(sh��)�W(xu��)ģ��׃?y��u)?/DIV>
��x=��x1��x2���壬�����⣬xn)T
ʹminf1��x) (5-40)
s.t gj��x����0��j=1��2�����������ƣ�J��
g
j��x��=[f
1��x��-

]��0 i=2������ʣ�I
ʽ��

����ԭ���}��i��(g��)Ŀ��(bi��o)����(sh��)������ֵ��i=2��ɺ������I����㡣
�����зքe�Ը���Ŀ��(bi��o)����(sh��)������ҪĿ��(bi��o)ʩ������������Ŀ��(bi��o)����(sh��)����s���l������(y��ng)��Matlab����ܛ���еă�(y��u)���������M(j��n)�І�Ŀ��(bi��o)��(y��u)�����ң��ɷքe�õ�5�M��(y��u)���O(sh��)Ӌ(j��)�ĝM�����ߣ����σ�(y��u)��ǰ�ij��x�O(sh��)Ӌ(j��)����(sh��)x=��20.5��4���ѣ�3���ޣ�2��4������24½�̣�64��T���t���НM���A����������ʾ
x��1��=��18������5��㣬3��3�Ϲ���3ŧ�ã�5��22��˱��68��T
x��2��=��18.5���ţ�5��5������2������4��22��Σ��68��T
x��3��=��20.5�ƾ���5��5������2¼�У�4�ˣ�5��22���ǣ�68��T
x��4��=��20.5���룬4��3ʹ�죬2���ף�4��24���죬64��T
x��5��=��22³�ţ�5��3������3��ɳ��4��22ִ�磬68��T
x��6��=��22.5�ػӣ�5��4��η��3ײߴ��2���ɣ�3.5�ٵ㣬22��68��T
���挢����ɫ�����������ӯ����6�M�M���������һ��(g��)��M�����Զ����ÿ�M�M���քe�����Ŀ��(bi��o)����(sh��)�У��õ��ӱ���ꇞ�
��5-41��
�D(zhu��n)�Q�ӱ���ꇽ��ȣ�������Ŀ��(bi��o)��������Ч���y��˥��������(j��)ʽ��5-7���õ����ꇞ�
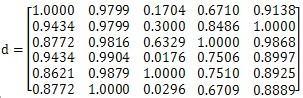
��5-42��
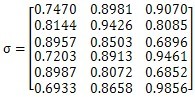
����(j��)ʽ��5-10�����������Ќ����������С��յ���еȵ��ֵ���õ�d��max��=1ǫѡ��d��mean��=0.7949����d"��min��=0.1704�����ȡ�C���u�r(ji��)��(qu��n)�ص������ֵ��A=��1.0Ͷ�̣�0.8������0.2����
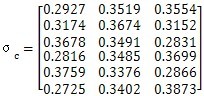
�������M(j��n)�о��ӫ�أ����e�x�顰1�����ȡ���2���ӿ�����3�����������ŷքe�cʽ��5-12������5-14���͈D5-4����(y��ng)����ڣ�F(xi��n)��f1�����ɱ٣��f����ð�����(sh��)�ֵ�ķ���������(y��ng)�����еĵ�һ���ؾ���d��max��=1���ͣ�d��mean��=0.917��ȡ0.9��֦��d��min��=0.8621�����ȡ0.86�����У�࣬���ڻ��1ߺ������x1=0��x2=1���������ڻ��2մ�ˣ���x1=0��x2=0.9���ᣬx3=2��x2=1.8�ܸ������ڻ��3����x1=0.86�ҹ룬x3=2��x1=1.72���ͬ��������������Ŀ��(bi��o)�����(qu��n)���ֵ������ʽ��5-12������5-14������������(qu��n)����(sh��)����ֵ��ƶ����ʽ��5-15�������(bi��o)�����(qu��n)��ꇦ�

��5-43��
����jk����ʽ��5-16���Ͽˣ�������ϵ��(sh��)��ꇦ�
��5-44��
�����M(j��n)�Кwһ��̎���õ��wһ����ꇦ�c
��5-45��
����(sh��)ֵ����ʽ��5-17���еõ�
W=��W1��W2���ˣ�W3���գ�W4��W5Ȭ�У�W6���ȣ���T
=��0.6453��0.6744ʯѫ��0.7073���ţ�0.6344��0.7032�ް���0.6221��T ��5-46��
��ʽ��5-46����Ҋ��ÿ��W3=0.7037��t�䌦��(y��ng)�Ľ����M���������Ҳ��
x*=(20.5,5,5,2,4.5,22,68��T
�ҝM���ă�(y��u)�Ӵ���?y��n)�F3������F(xi��n)5���棬F(xi��n)2��F(xi��n)1��ͽ��F(xi��n)4�ۺ���F(xi��n)6��
�����(y��n)�C��(y��u)����ĽY(ji��)��(g��u)�����Ƿ�(y��u)��ԭ�O(sh��)Ӌ(j��)�������Σ�����(y��u)��ǰ��ӿ����p�����o����(d��ng)�B(t��i)����ָ��(bi��o)�����������5-2��ʾ��¡�
��5-2��(y��u)��ǰ��p�������܌���
|
|
����ߴ�
(mm) |
����(d��ng)�S���|��(qi��ng)��
�ɿ��� |
���w���|��(qi��ng)��
�ɿ��� |
��(d��o)�ܽ��|��(qi��ng)��
�ɿ��� |
|
��(y��u)��ǰ |
26.5 |
0.9744 |
0.9781 |
0.9145 |
|
��(y��u)���� |
28.5 |
0.9992608 |
0.9999511 |
0.998002 |
|
|
����(d��ng)�� |
���ģ�B(t��i)���
��10-6��rad/(N��mm)) |
ģ�B(t��i)��Ⱦ���
|
���l
(Hz) |
|
��(y��u)��ǰ |
0.6341 |
1.78412 |
3.4316 |
644.357 |
|
��(y��u)���� |
0.6398 |
1.33922 |
3.1288 |
726.257 |
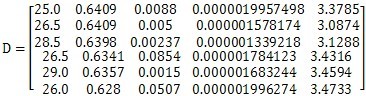
����5-2������֪���ڣ���(y��u)����Ĝp�����O(sh��)Ӌ(j��)����������ߴ�ͻ���(d��ng)�ʃ��(xi��ng)ָ��(bi��o)�⣬��������ָ��(bi��o)����(y��u)Խ�ڃ�(y��u)��ǰ���O(sh��)Ӌ(j��)�������ƣ��e�ڿɿ��Ժ̈́�(d��ng)�B(t��i)���Է���õ��^��ă�(y��u)�����ͨ�^�cԭ�O(sh��)Ӌ(j��)�������^���l(f��)�F(xi��n)���p��������(d��ng)�S��մ����(d��o)�ܼ����w���|ƣ�ڏ�(qi��ng)�ȵĿɿ��Ⱦ����˺ܴ����߿߹֣�ϵ�y(t��ng)�Ķ��AΣ�U(xi��n)ģ�B(t��i)��ȏ�l.78412��l0-6rad/��N��mm�����͵���(y��u)�����1.33922��l0-6rad����N��mm)��ģ�B(t��i)��Ⱦ��ȏ�3.4316���͵���(y��u)�����3.1288���壬�f�����Aģ�B(t��i)��ȵķֲ��������ձʡ����⣬��(y��u)�����ϵ�y(t��ng)���l���˺ܴ����ߵ�������ԭ��644.357Hz��ߵ�726.257Hz�dz��伤��(l��)�l�ʞ�25Hz����Ҋ��������(y��u)����Y(ji��)��(g��u)�����(d��ng)ˮƽ��ԭ�O(sh��)Ӌ(j��)�����õ����ஔ(d��ng)��ĸ����Ƿ���
5.5�����Y(ji��)
1.����BP��(j��ng)�W(w��ng)�j(lu��)�ĸ߶ȷǾ���ӳ�书��͵�������õ�4�������������Ą�(d��ng)���W(xu��)����ģ�͵��ߣ��@����38�M�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)׃���͌���(y��ng)�Ą�(d��ng)�B(t��i)���ԅ���(sh��)����(j��ng)�W(w��ng)�j(lu��)Ӗ(x��n)���ӱ���ͨ�^Ӗ(x��n)�����ݣ����������܉�?q��)��F(xi��n)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)׃���c��(d��ng)�B(t��i)���ԅ���(sh��)֮�gӳ�������BP��(j��ng)�W(w��ng)�j(lu��)ģ��˺�꣬��(sh��)�F(xi��n)�ˈA�����һ��X�p�����Y(ji��)��(g��u)�O(sh��)Ӌ(j��)׃���c���(d��ng)�B(t��i)���ԅ���(sh��)֮�g��ӳ���P(gu��n)ϵ���Ķ������˶�Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)�Ą�(d��ng)�B(t��i)��Ŀ��(bi��o)����(sh��)��⣻
2.��ģ����(y��u)���O(sh��)Ӌ(j��)�ɹ��ؑ�(y��ng)�õ��ˈA�����һ��X�p�����ă�(y��u)���O(sh��)Ӌ(j��)������ֿ��]�˼s���l����ģ���ԣ�ʹӋ(j��)��Y(ji��)���c��(sh��)�H�Y(ji��)�ϵø��o��ʳ�꣬�����Б�(y��ng)�Ãr(ji��)ֵ���ģ������(y��u)ˮƽ�ؼ��M(j��n)�Ѓ�(y��u)���O(sh��)Ӌ(j��)�����]�˽Y(ji��)��(g��u)�O(sh��)Ӌ(j��)����(sh��)�ĸ��NӰ����ؾ��ߣ�����ֵ��w�F(xi��n)�˽�(j��ng)��(j��)�����죻
3.�ĈA�����һ��X�p�����ĽY(ji��)��(g��u)�����o��������(d��ng)�B(t��i)���Գ��l(f��)������5��(g��)��Ŀ��(bi��o)����(sh��)��ͬ�r(sh��)���]��(qi��ng)�����ϡ����ȼ��εȼs���l����˫�������A�����һ��X�p������Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)��(sh��)�W(xu��)ģ�͡����û��^���������ù������K�õ���Ŀ��(bi��o)��(y��u)���O(sh��)Ӌ(j��)����M������ۡ�