Îp≠h(hu®¢n)úpÀŸ∆˜≠h(hu®¢n)∞ÂÉ»˝XΩ””|∑÷Œˆº∞˝XðÜœµΩy(t®Øng)ƒ£ëB(t®§i)∑÷Œˆ
3.1 Îp≠h(hu®¢n)úpÀŸ∆˜≠h(hu®¢n)∞ÂÉ»˝XΩ””|”–œÞ‘™∑÷Œˆ
“ÚûÈ‘⁄…Ÿ˝X≤ÓÉ»áß∫œ÷–ÏÙ𪣨≤ªÃé”⁄áß∫œŒª÷√µƒ˝X嶑⁄þM»Îáß∫œ÷Æ«∞“‘º∞‘⁄√ìÎxáß∫œ÷Æ∫Û≈€Ê“£¨∆‰É»°¢Õ‚˝X¿™ÈgµƒÈgœ∂∑«≥£–°µ©ŒØ£¨“Ú¥ÀÎp≠h(hu®¢n)úpÀŸ∆˜≠h(hu®¢n)∞ÂÉ»˝XðÜáß∫œÇ˜Ñ”‘⁄ðd∫…◊˜”√œ¬£¨“Úèó–‘◊É–ŒåçÎHΩ””|˝Xå¶îµ(sh®¥)þh¥Û”⁄¿Ì’ì÷ÿ∫œ∂»–˙ŒÒ£¨‘⁄ǘþfðd∫…µƒþ^≥Ã÷–—ˆÀ∞£¨ðÜ˝Xµƒ◊É–Œ¡ø“™¥Û”⁄“ª≤ø∑÷˝X嶵ƒÈgœ∂£¨þ@–©˝Xå¶æÕ“™Ω””|≤¢Õ¨ïr∑÷ì˙ðd∫…∏Ó◊π£¨þ@æÕ¥Û¥Û÷∏þ¡À’˚ÇÄ˝XðÜǘє—b÷√µƒ≥–ðdƒÐ¡¶∆Î÷„°£Õ¨ïråçÎH˝XðܵƒΩ””|å¶îµ(sh®¥)º∞Ω””|뙡¶£¨ÎS÷¯ðd∫…‘ˆ¥Û∂¯œý뙑ˆº”±À∫þ°£“Ú∂¯…Ÿ˝X≤ÓÉ»áß∫œ–––«˝XðÜǘєµƒåçÎHΩ””|˝Xå¶îµ(sh®¥)µƒ¥_∂®∂‘Õ˝£¨å¶˝XðÜ≥–ðdƒÐ¡¶µƒπ¿À„“‘º∞˝Xð܃£îµ(sh®¥)µƒ’˝¥_¥_∂®æþ”–÷ÿ“™“‚¡x°£å¶”⁄˝XðܵƒΩ””|ÜñÓ}µƒ∏“÷Ï£¨á¯É»Õ‚åW’þ嶥À“—◊˜¡À≤ª…Ÿ—–æøºÙ¡‚£¨»°µ√“ª–©—–æø≥…π˚°£»ª∂¯þ@–©—–æø”–µƒõ]”–øºë]’`≤Óµƒ”∞ÌëÀ©«©£¨”–µƒÉHøºë]ɻՂáß∫œ˝XðÜ∏±˝X¿™¿Ì’ìÈgœ∂…¯ƒ≥£¨õ]”–øºë]ðÜ˝X÷∆‘Ï’`≤Ó∫ÕðÜ˝Xµƒèó–‘◊É–Œµƒ”∞Ìë°£±æŒƒå¶”⁄≠h(hu®¢n)∞ÂÉ»˝XðÜΩ””|ÜñÓ}þM––¡À”ãÀ„¿Æ±©£¨”ãÀ„ïrøºë]ɻՂáß∫œ˝XðÜ∏±˝X¿™¿Ì’ìÈgœ∂Îπœµ°¢÷∆‘Ï’`≤Óº∞ðÜ˝Xèó–‘◊É–Œµƒ”∞Ì루‘⁄¥Àª˘µA…œ±∂œ®£¨Ω®¡¢¡À…Ÿ˝X≤ÓÉ»áß∫œ–––«˝XðÜǘєåçÎHΩ””|˝Xå¶îµ(sh®¥)º∞∏˜˝XÈgðd∫…∑÷≈‰µƒ¿Ì’ì∑÷Œˆ”ãÀ„µƒåçÛwƒ£–ÕªßÀ¬£¨¿˚”√I-DEASÐõº˛þM––¡À≠h(hu®¢n)∞ÂÉ»˝XðÜΩ””|”–œÞ‘™”ãÀ„£¨≤¢”√‘ìÐõº˛∑÷Œˆ”ãÀ„¡À‘⁄≤ªÕ¨ðd∫…π§õrœ¬µƒåçÎHΩ””|˝Xå¶îµ(sh®¥)ªÏºÏ°¢◊Ó¥ÛΩ””|뙡¶“‘º∞É…≠h(hu®¢n)∞Â…œ∏˜Ω””|˝Xµƒðd∫…∑÷≈‰«Èõr«¿∂Ω°£
3.1.1 ’`≤Óå¶÷±˝XÉ»áß∫œÇ˜Ñ”÷ÿ∫œ∂»µƒ”∞Ìë∑÷Œˆ
Õ®≥££¨É»áß∫œùuÈ_æÄ˝Xðܵƒ¿Ì’ì”ãÀ„ «∞¥üoÇ»œ∂µƒ«Èõr‘O”㵃–¥≤¢£¨µ´“™±£◊C˝XðÜǘєÏ`ªÓ–˙±¢£¨≤ª∞l(f®°)…˙ø®ú˛£¨±ÿÌö±£¡Ù◊„âÚµƒ˝XÇ»Ègœ∂”⁄Ω¿£¨‘⁄åçÎH÷∆‘Ï≈c∞≤—b÷–˝XðÜœµΩy(t®Øng)∂º±ÿ»ª¥Ê‘⁄≥þ¥Á’`≤Ó‘Ω√˚£¨þ@–©’`≤Ó÷±Ω””∞Ìë÷¯˝XðÜǘєµƒæ´∂»°¢˝Xðܵƒèä∂»∫Õ’ÒÑ”‘άﰣ
±äÀ˘÷Ð÷™√ÏðÔ£¨É»áß∫œ÷±˝XàA÷˘˝XðÜǘєµƒ¿Ì’ì÷ÿ∫œ∂»ûÈ£∫
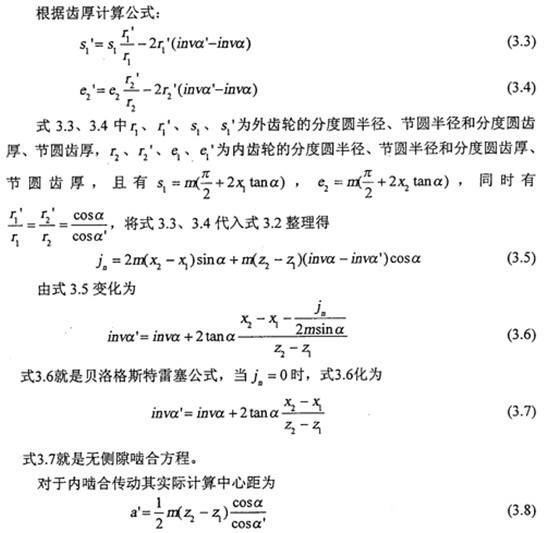
‘OÉ»˝X÷±˝XðÜǘєµƒ˝Xð܃£îµ(sh®¥)ûÈm¡° ø£¨∑÷∂»àAâ∫¡¶Ω«ûÈa£¨Õ‚˝XðÜ˝Xîµ(sh®¥)ûÈZ1√Ø◊∞£¨É»˝XðÜ˝Xîµ(sh®¥)ûÈZ2µ°ı£¨Õ‚°¢É»˝XðÜ◊ÉŒªœµîµ(sh®¥)∑÷ÑeûÈX1…ŸÃ¨°¢X2≥«≤ý£¨Õ‚°¢É»˝XðÜ◊ÉŒªœµîµ(sh®¥)∑÷ÑeûÈS1°‰±À∆Þ°¢S2°‰œ”””£¨Õ‚°¢É»˝XðÜπù(ji®¶)àA…œµƒ˝X≤€åí∑÷ÑeûÈe1°‰∞ƒ÷Ë°¢e2°‰∆Á«ø£¨É…áß∫œ˝XðÜπù(ji®¶)àA…œµƒàA÷ÐÇ»œ∂ûÈjt£¨É…áß∫œ˝XðÜ∑«π§◊˜Ç»˝X¿™—ÿπ´∑®æÄ∑ΩœÚµƒÇ»œ∂£®∑®œÚÇ»œ∂£©ûÈjnŒ™∞π°£Ô@»ª”–

£®3.2£©
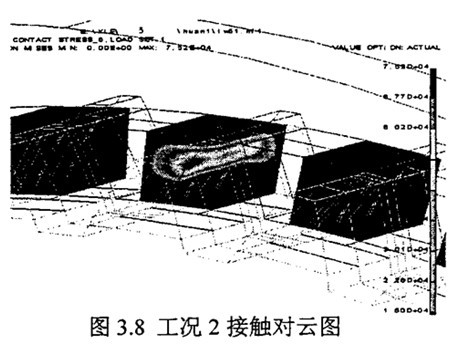
¬ì(li®¢n)œµ Ω3.6≈c Ω3.8£¨èƒÉ…π§÷–ø…“‘ø¥≥ˆ∑Ùæ©£¨”ãÀ„÷––ƒæýa°‰≈cáß∫œΩ«

°‰ «“ª“ªå¶ë™ÍPœµπ˚∫∞£¨þ@ò” Ω3.6ø…“‘±Ìþ_ûÈ»˝∑N–Œ Ω£∫
£®1£©”…¥_∂®µƒ˝XÇ»Ègœ∂jn≈c˝XðÜ◊ÉŒªœµîµ(sh®¥)X2-X1ÅÌ«Û÷––ƒæýa°‰£ª
£®2£©”…¥_∂®µƒ÷––ƒæýa°‰≈c˝XðÜ◊ÉŒªœµîµ(sh®¥)X2-X1ÅÌ«Û˝XÇ»Ègœ∂jnÕ»≥—£ª
£®3£©”…¥_∂®µƒ˝XÇ»Ègœ∂jn≈c÷––ƒæýa°‰ÅÌ«Û˝XðÜ◊ÉŒªœµîµ(sh®¥)X2-X1 µ¿ °£
Æî˝XðÜǘєµƒé◊∫Œ‘O”ãÖ¢îµ(sh®¥)¥_∂®∫Û£¨”∞ÌëåçÎHǘєµƒæÕ÷ª”–÷∆‘Ï∫Õ∞≤—b’`≤Óÿ◊Í£¨å¶”⁄÷––ƒæýa°‰∂¯—‘øÂ∆≤£¨”∞ÌëÀ¸µƒ“ÚÀÿ «÷∆‘Ï’`≤Ó°¢∞≤—b’`≤Óµ¥ÕŸ£¨∂¯≤ª «˝XÇ»Ègœ∂jn≈c˝XðÜ◊ÉŒªœµîµ(sh®¥)X2-X1◊¥—þ°£˝XðÜ‘O”ã «∞¥üoÇ»œ∂þM––µƒ£¨Õ¨ïr≤ªøºë]÷∆‘Ïæÿ‘ °¢∞≤—b’`≤Ó≈¥—±£¨µ´º”π§ïr£¨˝XðÜ˝X∫Òπ´≤Ó∂º «ÿì∆´≤Ó’‘“¨£¨º¥˝XðÜ∫Òπ´≤Ó∂º «ÿì∆´≤Ó∞“∏££¨º¥˝XðܱÿÌöúp±°£¨þ@ò”åçÎHǘє¥Ê‘⁄˝XÇ»œ∂Ω™«Ø°£»Áπ˚≤ªøºë]÷––ƒæýµƒ’`≤ÓÃππ⁄£¨”… Ω3.6µƒµ⁄3∑N–Œ Ωø…÷™£¨˝XÇ»œ∂µƒ◊ɪرÿ»ª”∞ÌëµΩ˝XðÜ◊ÉŒªœµîµ(sh®¥)µƒ◊ɪØ∏Á«≈°£Ô@»ª’ުΣ¨þ@ò”µƒ◊ɪؓ≤æÕï˛ π˝Xðܵƒ˝XÌîàAÆa…˙◊ɪغ§µ”£¨œý뙵ƒ˝XÌîàA…ð¡¶Ω«Æa…˙◊ɪأ¨þM∂¯”∞Ìë˝XðÜáß∫œ÷ÿ∫œ∂»¿˝—а£
”… Ω3.5◊ɪØûÈ
±æŒƒåçÚûò”ôCµƒ≠h(hu®¢n)∞½XðÜ‘O”ãÖ¢îµ(sh®¥)“ä±Ì3.1À˘ æŒÙ∆⁄£¨∏˘ì˛±æŒƒåçÚûò”ôCµƒ≠h(hu®¢n)∞½XðÜ‘O”ãÖ¢îµ(sh®¥)£¨ºŸ∂®áß∫œΩ«≤ª◊ɪØ∑–˛£¨Ñtå¶ë™˝XÇ»œ∂µƒ◊ɪØ≈“ª£¨ë™”√MATLAB¿LàD∑÷Œˆ£¨µ√µΩ¡À˝XðÜ◊ÉŒªœµîµ(sh®¥)ÎS˝XÇ»œ∂◊ɪØïrµƒ◊ɪؓé(gu®©)¬…àD√Œ«¿£¨“äàD3.1À˘ æ∞„‘Ù°£
±Ì3.1 É»áß∫œ˝XðÜÖ¢îµ(sh®¥)±Ì
|
|
Õ‚˝XðÜ |
≠h(hu®¢n)∞ÂÉ»˝X |
|
ƒ£îµ(sh®¥) |
2 |
|
˝Xîµ(sh®¥) |
56 |
58 |
|
áß∫œΩ« |
39.039°„ |
|
◊ÉŒªœµîµ(sh®¥) |
1.37 |
1.685 |
|
˝XÌî∏þœµîµ(sh®¥) |
0.7 |
|
÷––ƒæý |
2.42 |
|
˝XÌîàA÷±èΩ |
119.519 |
120.774 |
|
”ãÀ„÷ÿ∫œ∂» |
1.124 |
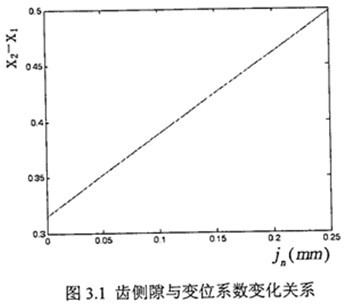
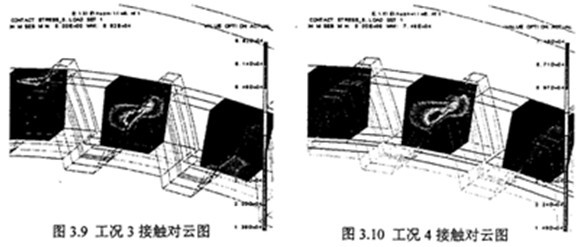
”…3.2àDø…“‘ø¥≥ˆ£¨Æî˝XÇ»œ∂jn”…0◊ɪØ÷¡.25∫¡√◊ïr£®≤ÈŸY¡œ»°ð^¥Û◊Ó–°Ç»œ∂Ö¢øº÷µ£©∞¬∑‘£¨˝XðÜ◊ÉŒªœµîµ(sh®¥)≤ÓX2-X1µƒ◊ɪءø”…Ω¸0.32◊ɪصΩ0.50∫þ«˘£¨◊ɪءÀºs0.18°£
嶔⁄˝XÌîàA÷±èΩ∞¥µ¬á¯π§òI(y®®)òÀú DINµƒ∫ÜÜŒ∑Ω∑®”–£∫
£®3.10£©£®3.11£©
”… Ω3.10ªÆ¥Í°¢3.11ø…“‘ø¥≥ˆæ⁄ƒÓ£¨ÆîøÇ◊ÉŒªœµîµ(sh®¥)

Æa…˙◊ɪØïr£¨±ÿ»ª“˝∆∆áß∫œ˝XðÜ˝XÌîàA÷±èΩµƒ◊ɪؗÈ∆Í°£∞¥X
1¿ΩÀÈ°¢X
2◊ɪØ◊Ó–°‘≠Ñt£¨”–»˝∑Nø…ƒÐ–‘÷تӣ¨º¥X
1≤ª◊ɵ’æ≥£¨X
2◊ɪØ0°´0.18£ªªÚX
1◊ɪØ0°´0.18º⁄ƒ«£¨X
2≤ª◊É∞˝±•£ªªÚX
1◊É–°£¨X
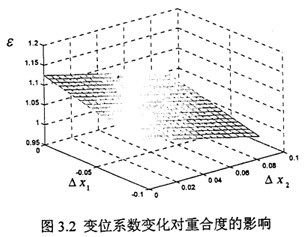
2◊É¥Û∏„÷®£¨◊ɪØ∑∂á˙0°´0.09‘ƿа£ºŸ∂®˝XðÜáß∫œΩ«≤ª◊É£¨∞¥±æŒƒåçÚûò”ôCÖ¢îµ(sh®¥)÷Ω≈∆£¨Æî˝XðÜ◊ÉŒªœµîµ(sh®¥)∞l(f®°)…˙◊ɪØïrÒ´œ‘£¨∆‰◊ɪءøå¶÷ÿ∫œ∂»µƒ”∞ÌëÝÓõr“äàD3.2À˘ æ°£èƒàD3.2À˘ æø…“‘ø¥≥ˆœ—≤≈£¨ÎSÕ‚˝XðÜ◊ÉŒª◊É–°ïr–¨º»£¨˝XðÜáß∫œ÷ÿ∫œ∂»úp–°£¨ÎSÉ»˝XðÜ◊ÉŒª◊É–°ïrÀ£Õ≠£¨˝XðÜáß∫œ÷ÿ∫œ∂»‘ˆ¥Û“ÿπΣ¨èƒàD÷–µƒ◊ɪØ⁄ÖÑðûÈø¥£¨Õ‚˝XðÜ◊ÉŒªœµîµ(sh®¥)µƒ◊ɪØå¶÷ÿ∫œ∂»µƒ”∞Ìë≥Ã∂»≈cÉ»˝XðÜ◊ÉŒªœµîµ(sh®¥)µƒ◊ɪØå¶÷ÿ∫œ∂»µƒ”∞Ìë≥Ã∂»¥Ûºs «œýÕ¨µƒ£¨÷ª «⁄ÖœÚ «∑¥œÚµƒ∂∏æÀ°£
嶔⁄÷––ƒæý∂¯—‘µ÷≈“£¨≤ÈŸY¡œ±Ì35.2-60ø…÷™÷––ƒæýµƒòOœÞ∆´≤ÓûÈ°¿0.011mm,ºŸ∂®Õ‚˝XðÜ˝XÌîàAâ∫¡¶Ω«≤ª◊É£¨É»˝XðÜ˝XÌîàAâ∫¡¶Ω«ÎS◊ÉŒªœµîµ(sh®¥)◊ɪØ∞–—У¨å¶”⁄÷––ƒæý◊ɪØå¶÷ÿ∫œ∂»µƒ”∞Ìë◊ɪØ⁄ÖÑðº∞◊ÉŒªœµîµ(sh®¥)◊ɪØå¶÷ÿ∫œ∂»µƒ”∞Ì뵃◊ɪØ⁄ÖÑð±»ð^«È–Œ“äàD3.3‘÷Ãø°£ºŸ∂®É»˝XðÜ˝XÌîàAâ∫¡¶Ω«≤ª◊É£¨Õ‚˝XðÜ˝XÌîàAâ∫¡¶Ω«ÎS◊ÉŒªœµîµ(sh®¥)◊ɪج≠øÙ£¨å¶”⁄÷––ƒæý◊ɪØå¶÷ÿ∫œ∂»µƒ”∞Ìë◊ɪØ⁄ÖÑðº∞◊ÉŒªœµîµ(sh®¥)◊ɪØå¶÷ÿ∫œ∂»µƒ”∞Ì뵃◊ɪØ⁄ÖÑð±»ð^«È–Œ“äàD3.4À˘ æÚ⁄≥ˆ°£
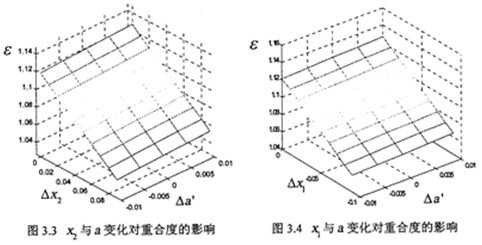
èƒàD3.3°¢3.4√˜Ô@ø¥≥ˆ÷––ƒæý◊ɪØå¶÷ÿ∫œ∂»µƒ”∞Ìë≥Ã∂»√˜Ô@–°”⁄◊ÉŒªœµîµ(sh®¥)◊ɪØå¶÷ÿ∫œ∂»µƒ”∞Ìë≥Ã∂»ÃŒ–Ô°£
˝XðÜ÷∆‘Ï’`≤Ó÷–å¶˝X¿™Ègœ∂”∞Ìëð^¥Ûµƒ”–◊Ó–°˝XÇ»Ègœ∂檥¶°¢ª˘πù(ji®¶)∆´≤Ó°¢˝X–Œ’`≤Ó攑߰¢˝Xæý∆´≤ÓÕÒπð¢˝X∫Ò∆´≤Óµ»µ»£¨µ´þ@–©“ÚÀÿœýª•ÍP¬ì(li®¢n)≥£’√°¢œýª•÷∆ºsº⁄ƒÀ°¢œýª•”∞Ì루ÃÿÑe «ª˘πù(ji®¶)∆´≤Ó≈Œ∫≠°¢˝X–Œ’`≤Ó≈ÈŒ«°¢˝Xæý∆´≤Ó°¢˝X∫Ò∆´≤Óµ»◊ÓΩK”∞Ìë˝XÇ»œ∂µƒ◊ɪØÕƫУ¨“Ú¥À◊ÓΩK”∞Ìë˝XðÜǘєµƒ÷˜“™“ÚÀÿ»‘ «÷––ƒæý∫Õ˝XÇ»œ∂µƒ◊ɪذ£∑÷ŒˆàD3.2π∏”Í°¢3.3æ‚∂£°¢3.4£¨‘⁄‘ ‘Sµƒ÷∆‘Ï’`≤Ó∑∂á˙É»º∞◊Ó–°˝XÇ»œ∂µƒ«Èõrœ¬∑¯º˘£¨÷ÿ∫œ∂»µƒ¿Ì’ì”ãÀ„÷µ◊ɪØ≤ª «∫Ð¥ÛÃπ±®°£
3.1.2 Ω””|∑÷Œˆ÷–÷∆‘Ï∞≤—b’`≤Óµƒ“˝»Î
胅œ ˆ∑÷Œˆø…÷™øÒ–¨£¨˝Xðܵƒ÷∆‘Ï∆¨‘Ò°¢∞≤—b’`≤Óå¶˝XðÜáß∫œµƒ÷ÿ∫œ∂»”–“ª∂®µƒ”∞Ì루µ´æÕ¿Ì’ì”ãÀ„÷µ∂¯—‘…ß◊·£¨èƒ…œ√ʵƒ∑÷ŒˆΩYπ˚ø…“‘ø¥≥ˆ∆‰”∞Ìë≥Ã∂» «≤ª¥Ûµƒ◊÷πУ¨»ª∂¯‘⁄…Ÿ˝X≤ÓÉ»áß∫œ˝XðÜ∏±÷–£¨áß∫œæÄ∏ΩΩ¸É…œýýèπ§◊˜˝Xå¶˝XÇ»Ègœ∂∑«≥£–°–≈≤ª°£ºŸ‘OÉ»˝XðÜπÃ∂®≥∞ £¨ÆîðÜ˝X≥–ì˙ðd∫…ïr£¨É…Ω””|ðÜ˝Xå¢∑÷ÑeÆa…˙èó–‘◊É–Œ£¨Õ‚˝XðÜ墿@∆‰ðSæÄ–˝ÞD“ª∏Ωº”Ω«¡Ú∏Í£¨Æîþ@“ª∏Ωº”ÞDΩ«◊„âÚ¥Ûïr√à ≤£¨≥˝‘≠”–Ω””|˝X嶿^¿m(x®¥)∞l(f®°)…˙Ω””|Õ‚£¨œýýèπ§◊˜˝X嶵ƒ˝XÇ»Ègœ∂“≤ï˛œ˚ ß∂° ≈£¨þ@ò”æÕÆa…˙¡À∂ý˝X≥–ðdΩ””|÷≠µ®°£
‘⁄±æπù(ji®¶)÷–£¨“˝»Î÷∆‘ÏÀ™”◊°¢∞≤—b’`≤Ó◊´¿ý£¨”√”–œÞ‘™∑Ω∑®”ãÀ„É»˝XǘєµƒΩ””|å¶îµ(sh®¥)£¨Õ¨ïrÚû◊C…œπù(ji®¶)÷–”ë’쵃”∞Ìë÷ÿ∫œ∂»µƒÍPÊIÖ¢îµ(sh®¥)≈À«¥°£”√I-DEASÐõº˛”ãÀ„≠h(hu®¢n)∞ÂÉ»˝XΩ””|ÜñÓ}”¢Ê“£¨∆‰ÍPÊI «˝XðÜðÜ˝XµƒåçÛwΩ®ƒ£°£å¶”⁄œýáß∫œµƒ˝XðÜ∑ð≥¶£¨“Ú∆‰É…π§◊˜˝X¿™Ç»√Êœýª•Œª÷√’`≤Óµƒ◊ɪØåß÷¬¡ÀåçÎH˝X¿™Ègœ∂µƒ◊ɪأ¨‘⁄áß∫œæÄ∏ΩΩ¸÷ª”–…Ÿîµ(sh®¥)é◊å¶˝X‘⁄Œ“ÇÉ”ë’ì∑∂á˙É»±·»¬£¨þ@¿ÔŒ“ÇÉ÷ªøºë]å¶˝X¿™Ègœ∂”∞Ìëð^¥Ûµƒ◊Ó–°˝XÇ»Ègœ∂…Æ…Ÿ°¢ª˘πù(ji®¶)∆´≤Ó°¢˝X–Œ’`≤Óπ©ƒÏ°¢˝Xæý∆´≤Ó°¢˝X∫Ò∆´≤Óµ»∫µ–≥°£‘⁄”√”√I-DEASÐõº˛þM––˝XðÜðÜ˝XµƒåçÛwΩ®ƒ£ïr’·¿®£¨å¶ðÜ˝X∂¯—‘£¨—ÿàA÷Ð «æ˘ÑÚ∑÷≤ºµƒ≥∑∑¿£¨“Ú¥À£¨˝Xðܵƒ÷∆‘Ï’`≤Ó‘⁄åçÛw‘Ï–Õïrºƒ‘¬£¨±Ì¨F(xi®§n)‘⁄˝XðÜðÜ˝Xµƒ˝X∫Òº∞ª˘àA≥þ¥Áµƒ’`≤Ó…œπºœ•°£∂¯Ωõ∂ý‘™ªÿöw∑÷Œˆ£¨µ√≥ˆ∏˜◊É¡øå¶˝X¿™Ègœ∂µƒÉ»‘⁄”∞ÌëÍPœµ±Ì√˜£∫˝Xðܵƒª˘πù(ji®¶)∆´≤Ó «◊Ó÷˜“™µƒ”∞Ìë“ÚÀÿ—˙∞π°£
±æŒƒÎp≠h(hu®¢n)úpÀŸ∆˜˝Xðܺ”π§æ´∂»ûÈ7ºâ≥ß∂∂£¨∏˘ì˛ŸY¡œøÀ∞√£¨≤ȵ√˝Xðܵƒª˘πù(ji®¶)òOœÞ∆´≤Ó°˜fpbûÈ°¿0.014≥¿∏®£¨å¶”⁄˝X∫ÒòOœÞ∆´≤Ó£¨∏˘ì˛ŸY¡œ±£ÈУ¨≤ȵ√˝XðÜ˝X∫ÒµƒòOœÞ∆´≤Ó°˜Esµƒ…œ∆´≤ÓûÈ-128¶Ãm¥Þ𣣨œ¬∆´≤ÓûÈ-192¶Ãm£¨å¢þ@–©”∞Ìë“ÚÀÿµƒòOœÞ∆´≤Ó¿ð‘⁄£¨Õ®þ^é◊∫ŒÍPœµµƒÞDìQÀ‚∆«£¨ìQÀ„µΩª˘πù(ji®¶)…œ”Þ∑∑£¨Õ®þ^Ö¢îµ(sh®¥)∑Ω≥ÿL≥ˆ˝XðÜÜŒÇÄðÜ˝XµƒðÜ¿™æÄ∂¢∏®£¨‘Ÿ”…ÜŒÇÄðÜ˝Xµƒ˝X¿™—ÿàA÷ÐΩ”˝XðÜ˝Xîµ(sh®¥)æ˘ÑÚèÕ÷∆£¨þ@ò”µ√µΩ’˚ÇÄ˝Xðܵƒ˝X¿™æÄ√◊¥Ó£¨”…˝X¿™æÄ—”…Ï≥…˝XðÜåçÛwƒ£–Õ≈ø”•°£
”…”⁄¡„≤øº˛µƒ÷∆‘Ï’`≤Ó£¨Õ¨ïr“Ú—b≈‰‘≠“ڱМÀ£¨‘⁄þM––’˚Ûw—b≈‰ïræ¿≥¡£¨Æa…˙¡„≤øº˛Ègµƒ∞≤—b’`≤Ó£¨þ@–©’`≤Ó÷±Ω””∞Ìë˝XðÜÈgµƒáß∫œÝÓëB(t®§i)≤̰̌£å¶”⁄Îp≠h(hu®¢n)úpÀŸ∆˜÷–µƒ≠h(hu®¢n)∞ÂÉ»˝XðÜáß∫œÇ˜Ñ”£¨”…”⁄≠h(hu®¢n)∞ÂÉ»˝X÷––ƒ≈cðî≥ˆ˝XðÜ÷––ƒ÷ÆÈgµƒ∆´–ƒæý≥þ¥Áð^–∂≠÷Í°£®±æŒƒÎp≠h(hu®¢n)úpÀŸ∆˜µƒ∆´–ƒæýûÈ2.42mm) ∫⁄∆Ú£¨“Ú¥À£¨∆´–ƒðSµƒ∆´–ƒæý÷∆‘Ï’`≤Óº∞÷––ƒæý÷∆‘Ï∞≤—b’`≤Ó «”∞Ìë≠h(hu®¢n)∞ÂÉ»˝Xáß∫œÇ˜Ñ”µƒÍPÊIÃ≈Ê¢°£±æŒƒÎp≠h(hu®¢n)úpÀŸ∆˜É…∆´–ƒðS∆´–ƒæýµƒ÷∆‘Ï’`≤ÓûÈ°¿0.011 ƒ‚◊Ê°£
æC∫œ“‘…œ’`≤Ó∑÷Œˆ£¨å¢≠h(hu®¢n)∞Â≈cðî≥ˆ˝XðÜðS∞¥òOœÞ∆´≤Ó≥þ¥ÁÀ˘∂®µƒŒª÷√þM––ðÜ˝Xáß∫œ—b≈‰≤¡◊√£¨»ª∫ÛþM––”–œÞ‘™Ω””|∑÷Œˆæ„÷Ó°£
3.1.3 ˝XðÜ”–œÞ‘™ƒ£–ÕµƒΩ®¡¢º∞þÖΩÁólº˛µƒ¥_∂®
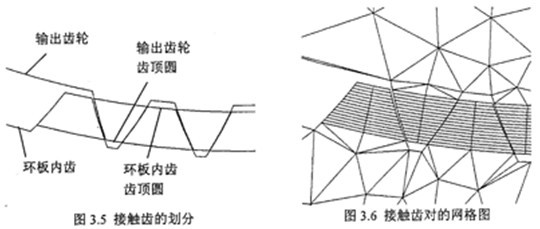
≠h(hu®¢n)∞ÂÉ»˝XðÜ≈cðî≥ˆðS˝XðÜ÷ÆÈgµƒÇ˜Ñ” «÷±˝XðÜǘє£¨ûȱ£◊CþM––Ω””|”ãÀ„ïr…Þ≤∞£¨”–ð^∂ýµƒ”–ð^Ω””|Ö^(q®±)”Ú““∞££¨˝XðÜðÜ˝X≤ø∑÷µƒ”–œÞ‘™æW∏Ò≤…”√”≥…‰æW∏ÒÑù∑÷∑®£®Mapped Meshing £©å¶˝XðÜþM––”–œÞ‘™æW∏ÒÑù∑÷°£Õ¨ïræ‚·´£¨ûȱ£◊CÉ…å¶áß∫œ˝XðÜÀ˘Ñù∑÷µƒæW∏ÒΩ””|嶜ý뙵ƒ√ʃÐå¶ë™˝R£¨“Ú¥À˝XðÜáß∫œµƒΩ””|√Êœýë™ë™Æî˝R’˚∏¶∫Œ°£”√ðî≥ˆðS˝Xðܵƒ˝XÌî√ÊÀ˘‘⁄µƒðÜ¿™«˙√Êå¶≠h(hu®¢n)∞ÂÉ»˝XþM––Ñù∑÷£®partition √¸¡Ó£©≥ˆ¥µ£¨Õ¨¿Ì”√≠h(hu®¢n)∞ÂÉ»˝Xµƒ˝XÌî√ÊÀ˘‘⁄µƒðÜ¿™«˙√Êå¶ðî≥ˆðS˝XðÜþM––Ñù∑÷£¨þ@ò”µ√µΩå¶ë™˝R’˚µƒ˝XðÜáß∫œµƒΩ””|√Ê’ÞŒπ£¨»ÁàD3.5À˘ æ¥∑¿Œ°£∏˘ì˛àD3.5À˘ 棨≤…”√”≥…‰æW∏ÒÑù∑÷∑®( Mapped Meshing£©þM––æW∏ÒÑù∑÷µƒðÜ˝X≤ø∑÷º¥ «àD÷–ðî≥ˆ˝XðÜ˝XÌîàA≈c≠h(hu®¢n)∞ÂÉ»˝X˝XÌîàA÷ÆÈgÀ˘Ñù∑÷µƒ≤ø∑÷Œ°∫ƒ£¨∂¯∆‰”ý≤ø∑÷≤…”√◊‘”…æW∏ÒÑù∑÷∑®£®Free Meshing£©þM––Ñù∑÷«ÔÙÔ£¨Ñù∑÷æW∏Ò∫Ûµƒ≤ø∑÷æW∏ÒàD“äàD3.6À˘ æΩ•≈≈°£øºë]åçÎHΩ””|˝Xå¶îµ(sh®¥)≤ªï˛Ã´∂ýÕ≤±€£¨À˘“‘√øâK≠h(hu®¢n)∞Â…œ÷ªΩo≥ˆ6ÇÄðÜ˝XþM––Ω””|”ãÀ„øæ◊√°£≠h(hu®¢n)∞Âáß∫œµƒåçÎHþ^≥à «≠h(hu®¢n)∞½XðÜéßÑ”ðî≥ˆ˝XðÜþ\Ñ”£¨”ãÀ„ïrûÈ∑Ω±„Ω≈◊‘£¨ºŸ‘O≠h(hu®¢n)∞ÂπÃ∂®≤ªÑ”±πøµ£¨‘O∂®ðî≥ˆðS¿@ðSæÄÞDÑ”£¨å¢úpÀŸ∆˜µƒðî≥ˆπ¶¬ ìQÀ„ûÈðî≥ˆ≈§æÿ¡™∑Ï£¨º”‘⁄ðî≥ˆðSµƒðî≥ˆ∂À”Æ ð°£
3.1.4 Ω””|”ãÀ„ΩYπ˚∑÷Œˆ
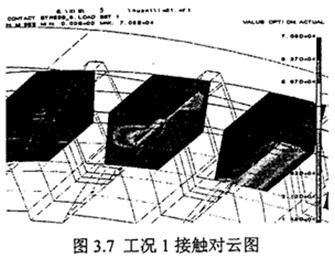
∞¥øºë]∆´–ƒæý’`≤Ó”∞Ìëº∞øºë]˝X∫Ò’`≤Ó”∞Ì뵃ɅÇÄòOœÞÝÓëB(t®§i)£¨ΩM∫œûÈ Æ∑N«ÈõrþM––”ãÀ„Œ≠∫˘°£ Æ∑N”ãÀ„π§õr“ä±Ì3.2À˘ 檄é°£øºë]˝X∫Ò’`≤Ó”∞Ì뵃ɅÇÄòOœÞÝÓëB(t®§i)∑÷Ñe «˝XðܵƒðÜ˝X◊Ó±°—þ¥œ°¢◊Ó∫Ò±˙¡¢£¨∆´–ƒæý’`≤ÓµƒÉ…ÇÄòOœÞÝÓëB(t®§i)∑÷Ñe «∆´–ƒðSµƒ∆´–ƒæý◊Ó¥Û°¢◊Ó–°É…∑N«Èõr‘¯Œ√°£∑NΩ””|«Èõrµƒ”ãÀ„ΩYπ˚∑÷Ñe”…±Ì3.3°´3.7¡–≥ˆ‘þ∑ß°£
3.2”ãÀ„π§õr¡–±Ì
|
–Ú
Ãñ |
π§õr’f√˜ |
–Ú
Ãñ |
π§õr’f√˜ |
|
˝X∫ÒÝÓëB(t®§i) |
∆´–ƒæýÝÓëB(t®§i) |
É…≠h(hu®¢n)∞ÂÝÓëB(t®§i) |
˝X∫ÒÝÓëB(t®§i) |
∆´–ƒæýÝÓëB(t®§i) |
É…≠h(hu®¢n)∞ÂÝÓëB(t®§i) |
|
1 |
◊Ó∫Ò |
üo’`≤Ó |
å¶∑Q |
6 |
◊Ó±° |
◊Ó¥Û’˝∆´≤Ó |
å¶∑Q |
|
2 |
◊Ó±° |
üo’`≤Ó |
å¶∑Q |
7 |
◊Ó∫Ò |
◊Ó¥Ûÿì∆´≤Ó |
≤ªå¶∑Q |
|
3 |
◊Ó∫Ò |
◊Ó¥Ûÿì∆´≤Ó |
å¶∑Q |
8 |
◊Ó±° |
◊Ó¥Ûÿì∆´≤Ó |
≤ªå¶∑Q |
|
4 |
◊Ó±° |
◊Ó¥Ûÿì∆´≤Ó |
å¶∑Q |
9 |
◊Ó∫Ò |
◊Ó¥Û’˝∆´≤Ó |
≤ªå¶∑Q |
|
5 |
◊Ó∫Ò |
◊Ó¥Ûÿì∆´≤Ó |
å¶∑Q |
10 |
◊Ó±° |
◊Ó¥Û’˝∆´≤Ó |
≤ªå¶∑Q |
3.4π§õr“ªΩ””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
һ |
200 |
1 |
1 |
75.2 |
|
160 |
1 |
1 |
66.8 |
|
120 |
1 |
1 |
56.1 |
|
80 |
1 |
1 |
41.1 |
|
40 |
1 |
1 |
28.0 |
3.5π§õr∂˛Ω””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
∂˛ |
200 |
1 |
1 |
75.2 |
|
160 |
1 |
1 |
66.8 |
|
120 |
1 |
1 |
56.1 |
|
80 |
1 |
1 |
41.1 |
|
40 |
1 |
1 |
28.0 |
3.6π§õr»˝Ω””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
»˝ |
200 |
1 |
1 |
68.2 |
|
160 |
1 |
1 |
62.6 |
|
120 |
1 |
1 |
55.1 |
|
80 |
1 |
1 |
40.2 |
|
40 |
1 |
1 |
25.3 |
3.7π§õrÀƒΩ””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
Àƒ |
200 |
2 |
2 |
74.6 |
|
160 |
2 |
2 |
62.1 |
|
120 |
2 |
2 |
49.0 |
|
80 |
2 |
2 |
41.8 |
|
40 |
1 |
1 |
26.6 |
3.8π§õrŒÂΩ””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
ŒÂ |
200 |
2 |
2 |
2.2 |
|
160 |
2 |
2 |
58.6 |
|
120 |
2 |
2 |
45.6 |
|
80 |
2 |
2 |
42.1 |
|
40 |
1 |
1 |
26.5 |
3.9π§õr¡˘Ω””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
¡˘ |
200 |
1 |
1 |
76 |
|
160 |
1 |
1 |
63.2 |
|
120 |
1 |
1 |
49.7 |
|
80 |
1 |
1 |
40.5 |
|
40 |
1 |
1 |
28.5 |
3.10π§õr∆þΩ””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
∆þ |
200 |
1 |
3 |
76 |
|
160 |
0 |
2 |
63.2 |
|
120 |
0 |
2 |
49.7 |
|
80 |
0 |
1 |
40.5 |
|
40 |
0 |
1 |
28.5 |
3.11π§õr∞ÀΩ””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
∞À |
200 |
1 |
2 |
130.0 |
|
160 |
0 |
2 |
114.0 |
|
120 |
0 |
2 |
93.4 |
|
80 |
0 |
2 |
70.2 |
|
40 |
0 |
2 |
39.0 |
3.12π§õræ≈Ω””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
æ≈ |
200 |
2 |
1 |
104.0 |
|
160 |
2 |
0 |
92.6 |
|
120 |
2 |
0 |
86.6 |
|
80 |
2 |
0 |
65.3 |
|
40 |
1 |
0 |
42.8 |
3.13π§õr ÆΩ””|«Èõr”ãÀ„±Ì
|
’`≤Ó«Èõr |
ðd∫…£®N°§m£© |
Ω””|˝Xå¶îµ(sh®¥) |
◊Ó¥ÛΩ””|뙡¶£®MPa£© |
|
≠h(hu®¢n)∞Â1
|
≠h(hu®¢n)∞Â2 |
|
π§
õr
Æ |
200 |
2 |
1 |
136.0 |
|
160 |
2 |
0 |
117. |
|
120 |
2 |
0 |
102.0 |
|
80 |
2 |
0 |
77.4 |
|
40 |
2 |
0 |
47.6 |
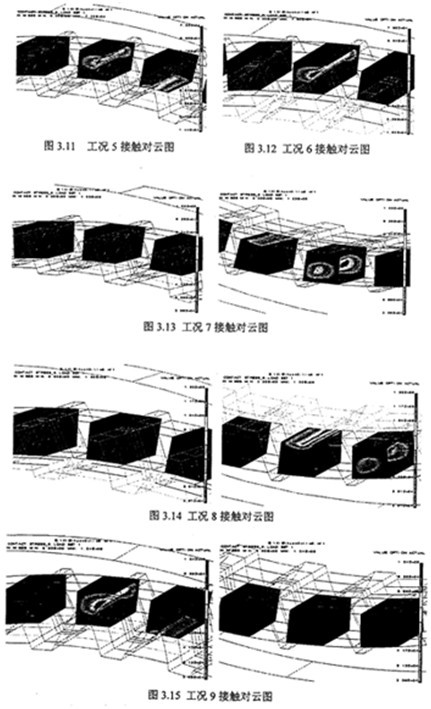
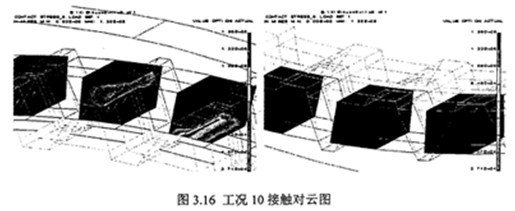
”…±Ì3.2°´3.13ø…“‘ø¥≥ˆ£¨üo’ì”–üo÷∆‘Ï«Ê”±°¢∞≤—b’`≤Óµƒ”∞ÌëȪÀπ£¨ÎS÷¯ÿì∫…µƒ‘ˆº”£¨˝XðÜåçÎHáß∫œΩ””|å¶îµ(sh®¥)‘ˆº”¬ß≈ı£¨µ´èƒ”ãÀ„ΩYπ˚∑÷Œˆ◊C√˜Õ‘À◊£¨ÿì∫…å¶Ω””|嶵ƒ”∞Ìë–°”⁄’`≤Óå¶Ω””|嶵ƒ”∞Ì밣嶱»±Ì÷–µƒΩ””|å¶îµ(sh®¥)∫ÕΩ””|뙡¶‘ ≈У¨îµ(sh®¥)ì˛±Ì√˜Æî˝X∫Ò∞l(f®°)…˙◊ɪØïrÕı¥’£¨åçÎHΩ””|˝Xå¶îµ(sh®¥)◊ɪر»ð^¥Û£¨Õ¨ïr◊Ó¥ÛΩ””|뙡¶“≤”–√˜Ô@◊ɪء˚Àø°£èƒ◊ɪصƒ⁄ÖÑð…œø¥≥ˆ≈c«∞√ʵƒ¿Ì’ìÕ∆åß◊ɪØ⁄ÖÑðœýÕ¨À˜≈Σ¨þ@¿Ô÷ª «∏¸º”√˜Ô@°£
π§õr¡˘÷¡π§õr Æþ@Àƒ∫Õ«Èõr»ıƒ¿£¨ «÷∏É…≠h(hu®¢n)∞Â÷ÆÈg≤ªå¶∑Q∞Ÿ–’£¨º¥∆´–ƒðSµƒÉ…ÇÄ∆´–ƒπ’µƒ≥þ¥Á’`≤Ó≤ª“ª÷¬£¨þ@¿Ôøºë]µƒ «Ãÿ ‚ÝÓõrøˆƒæ£¨èƒ±Ì3.10£≠3.13ø¥≥ˆ¿ð¬££¨ÆîÉ…≠h(hu®¢n)∞Â≤ªå¶∑Qïr£¨å¢Æa…˙á¿÷ÿµƒðd∫…≤ªæ˘¨F(xi®§n)œÛ√“𥣨ðd∫…∆´œÚ÷––ƒæý–°µƒ≠h(hu®¢n)∞ÂÉ»˝X…œ±±∞Œ£¨…ı÷¡÷ª”–“ªÇÄ≠h(hu®¢n)∞Â≥– Ððd∫…ªª—Ì°£”…¥À’f√˜£¨å¶”⁄Îp≠h(hu®¢n)úpÀŸ∆˜∆´–ƒðS”–º”𧓑≤´£¨ë™ÃÿÑe◊¢“‚É…«˙∞∆µƒ÷∆‘Ï’`≤Ó±Ë∫Ω£¨ë™±M¡ø π∞≤—b∫√µƒÉ…≠h(hu®¢n)∞Âæþ”–ð^∫√µƒå¶∑Q–‘°£àD3.7°´àD3.12ûÈ¡˘∑Nπ§õrœ¬≠h(hu®¢n)∞ÂÉ»˝XµƒΩ””|˝X嶵ƒë™¡¶‘∆àDœ ∏Ω°£
3.2 Îp≠h(hu®¢n)úpÀŸ∆˜”–œÞ‘™ƒ£–ÕΩ®¡¢º∞ƒ£ëB(t®§i)∑÷Œˆ
Ω¸ƒÍÅÌ∏∆Ω∂£¨ÎS÷¯˝XðÜ’ÒÑ”‘άæøµƒ≤ªîý…ӻΣ¨≤ªÉH–Ë“™øºë]˝XðÜœµΩy(t®Øng)º∞∆‰áß∫œþ^≥ÃŒð∞¸£¨þıÿÌöøºë]Ñ”ëB(t®§i)áß∫œ¡¶‘⁄’˚ÇÄ˝XðÜœµΩy(t®Øng)÷–µƒÇ˜þfπŸ–¢£¨“‘º∞œµΩy(t®Øng)÷–∏˜¡„≤øº˛µƒπÔ–Ãÿ–‘∫ÕÑ”ëB(t®§i)Ìë뙵ƒ–‘Ÿ|£¨“Ú¥À—·»¶£¨±ÿÌö“‘’˚ÇÄ˝XðÜœµΩy(t®Øng)ûÈ—–æø嶜Û√≈«Œ£¨Ω®¡¢Õ¨ïr∞¸¿®Ç˜Ñ”œµΩy(t®Øng)∫ÕΩYò㜵Ωy(t®Øng)µƒÕÍ’˚œµΩy(t®Øng)µƒ∑÷Œˆƒ£–Õ°£±æπù(ji®¶)墑⁄Îp≠h(hu®¢n)úpÀŸ∆˜þ\Ñ”Ãÿ–‘∑÷Œˆµƒª˘µA…œƒ¶“…£¨“‘’˚ÇÄÎp≠h(hu®¢n)úpÀŸ∆˜˝XðÜœµΩy(t®Øng)ûÈ嶜ی£»⁄£¨Ω®¡¢”–œÞ‘™Ñ”¡¶∑÷Œˆƒ£–Õ£¨»´√Ê∑÷Œˆ‘융Ωy(t®Øng)µƒπÔ–Ãÿ–‘∫ÕÑ”ëB(t®§i)Ìë뙿◊¥¸°£
˝XðÜœµΩy(t®Øng)µƒπÔ–Ãÿ–‘“ª∞„÷∏œµΩy(t®Øng)µƒπÔ–Ól¬ ∫ÕπÔ–’Ò–Õº™—Í£¨ «˝XðÜœµΩy(t®Øng)µƒÑ”ëB(t®§i)Ãÿ–‘÷Æ“ª£¨À¸å¶œµΩy(t®Øng)µƒÑ”ëB(t®§i)Ìëë™ø¨≈≠£¨Ñ”ðd∫…µƒÆa…˙≈cǘþfµ∞…◊£¨“‘º∞œµΩy(t®Øng)’ÒÑ”µƒ–Œ Ωµ»∂ºæþ”–÷ÿ“™“‚¡x°£¥ÀՂ؅棨πÔ–Ãÿ–‘þÄ «”√’Ò–ÕØBº”∑®«ÛΩ‚œµΩy(t®Øng)Ìë뙵ƒª˘µA±ßÕÍ°£”…”⁄œµΩy(t®Øng)µƒπÔ–Ãÿ–‘±Ì√˜¡À‘⁄ƒƒ–©Ól¬ œ¬ΩYòãï˛Æa…˙π≤’Ò“‘º∞‘⁄∏˜ÎAÓl¬ œ¬ΩYò㵃œýå¶◊É–Œ£¨“Ú¥À嶔⁄∏ƒ…∆ΩYòãÑ”ëB(t®§i)Ãÿ–‘æþ”–÷ÿ“™“‚¡x»–≈ð°£Õ®≥£«…”È£¨—–æø˝XðÜœµΩy(t®Øng)πÔ–Ãÿ–‘”–¿Ì’ì”ãÀ„∑®∫ÕåçÚûúy‘á∑®É…∑N°£åçÚûúy‘á墑⁄“‘∫Ûµƒ’¬πù(ji®¶)÷–—–æø∫ÊÃ˘£¨±æ’¬å¢¿˚”√îµ(sh®¥)÷µ”ãÀ„∑®”ãÀ„Îp≠h(hu®¢n)úpÀŸ∆˜˝XðÜœµΩy(t®Øng)µƒπÔ–Ãÿ–‘Ω˚ÃÌ°£ΩYò㜵Ωy(t®Øng)πÔ–Ãÿ–‘µƒîµ(sh®¥)÷µ”ãÀ„Õ®≥£≤…”√”–œÞ‘™ƒ£ëB(t®§i)∑÷Œˆ∑Ω∑®°£‘⁄”–œÞ‘™∑÷Œˆ÷–”π∑¸£¨ΩYò㵃є¡¶åWÃÿ’˜”√Œ¢∑÷∑Ω≥ÃΩM±Ì’˜∂»µÃ£¨ÑtΩYò㵃πÔ–Ól¬ ∫ÕπÔ–’Ò–Õœý뙵ÿ”…Ñ”¡¶åW∑Ω≥õƒÃÿ’˜÷µ∫ÕÃÿ’˜œÚ¡øÀ˘¥_∂®°£À˘“‘ø…“‘’fÕÍ≤棨«ÛœµΩy(t®Øng)µƒπÔ–Ól¬ ∫ÕπÔ–’Ò–Õº¥ûÈ«ÛœµΩy(t®Øng)µƒÃÿ’˜÷µ∫ÕÃÿ’˜œÚ¡ø°£Ãÿ’˜÷µÜñÓ}µƒΩ‚∑®∫Ð∂ýŒ¶»Ô£¨÷˜“™”–∂ýÌó Ω∏Óæĵ¸¥˙∑®æ€æƒ°¢ ∏¡øƒÊµ¸¥˙∑®Ωøª °¢èV¡x—≈ø…±»∑®°¢◊”ø’Ègµ¸¥˙∑®∫Õ––¡– Ω ’øs∑®÷Ï∫◊°£Ñ”¡¶ÜñÓ}”–œÞ‘™∑® ««ÛΩ‚èÕÎsΩYò㵃¥Û–ÕÑ”¡¶åW∑Ω≥ÃΩMµƒÃÿ’˜÷µÜñÓ}µƒ”––ß∑Ω∑®«∫» °£±æ’¬å¢”√Ñ”¡¶”–œÞ‘™∑®å¶Îp≠h(hu®¢n)úpÀŸ∆˜˝XðÜœµΩy(t®Øng)þM––Ãÿ’˜÷µ∑÷Œˆ£¨”ãÀ„∆‰πÔ–Ól¬ ∫ÕπÔ–’Ò–Õ—”±≠°£
±æŒƒΩ®¡¢¡À˝XðÜœµΩy(t®Øng)µƒ”–œÞ‘™Ñ”¡¶åWƒ£–ÕÕ±√ª£¨”√I-Deas ºØ≥…ªØÐõº˛µƒπÔ–ƒ£ëB(t®§i)«ÛΩ‚ƒ£âK«ÛΩ‚¡À˝XðÜœµΩy(t®Øng)µƒπÔ–Ól¬ ∫Õ’Ò–Õ£¨≤¢”√Ìëë™Ñ”¡¶£®Response Dynamios ) ∑÷Œˆƒ£âK—–æø¡À˝XðÜǘєœµΩy(t®Øng)µƒÑ”ëB(t®§i)Ìëë™Ãÿ–‘√µ’´°£“™þM––”–œÞ‘™ƒ£ëB(t®§i)∑÷Œˆ“®ª∆£¨±ÿÌöœ»Ω®¡¢˝XðÜœµΩy(t®Øng)µƒ”–œÞ‘™¡¶åWƒ£–Õ°£
3.2.1 ˝XðÜœµΩy(t®Øng)”–œÞ‘™ƒ£–ÕµƒΩ®¡¢
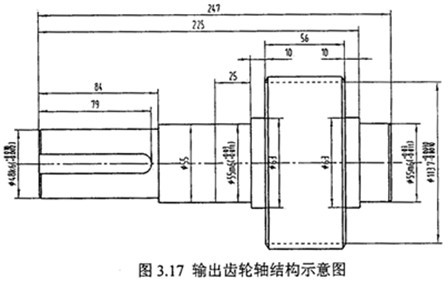
Õ®≥£Ú«‰Ã£¨åçÎHπ§≥ÃΩYòã∂º «Ÿ|¡ø÷Œ◊®°¢ÑÇ∂»∫Õ◊˃·þB¿m(x®¥)∑÷≤ºµƒþB¿m(x®¥)œµΩy(t®Øng)£¨∆‰Ñ”¡¶åWÃÿ–‘≥£≥£”√∆´Œ¢∑÷∑Ω≥ÃΩM√Ë ˆ‘‚∂•£¨µ´”…”⁄åçÎHΩYò㵃é◊∫Œ–ŒÝÓº∞þÖΩÁólº˛èÕÎs’≈∑£¨Îy“‘”√Ω‚Œˆ∑®«ÛΩ‚∆´Œ¢∑÷∑Ω≥ÃΩM°£”⁄ «∞Ù∆Ï£¨Õ®≥£å¶åçÎHπ§≥ÃΩYòãÎx…¢ªØ¥≠≈˙£¨å¢þB¿m(x®¥)∑÷≤ºÖ¢îµ(sh®¥)œµΩy(t®Øng)∫ܪØûÈæþ”–”–œÞ∂ýÇÄ◊‘”…∂»µƒºØ÷–Ö¢îµ(sh®¥)œµΩy(t®Øng)°£”√æÿÍá±Ìþ_ Ωå¶√øÇÄÜŒ‘™þM––ÜŒ‘™∑÷Œˆœ≥»ý£¨∏˘ì˛Ã쌪“∆‘≠¿ÌΩ®¡¢ÜŒ‘™µƒÑ”ëB(t®§i)∆Ω∫‚∑Ω≥Ã Ω»ƒ…Ó£ª»ª∫Û£¨◊˜’˚Ûw∑÷Œˆ¿œÀŸ£¨µ√µΩ’˚ÇÄΩYò㜵Ωy(t®Øng)µƒÑ”¡¶åW∑Ω≥à Ω÷ýœ≤°£ë™”√◊‘”…’ÒÑ”þÖΩÁólº˛£¨µ√µΩ”…”–œÞ‘™∑®”ãÀ„’˚ÇÄΩYò㜵Ωy(t®Øng)πÔ–’ÒÑ”Ãÿ–‘µƒª˘±æ∑Ω≥ÃÈŸ»Ø°£þ@ò”∂Ӝʣ¨Õ®þ^Îx…¢ªØƒ£–Õ£¨ø…å¢èÕÎsµƒ∆´Œ¢∑÷∑Ω≥ÃΩM∫ܪØûÈø…“‘«ÛΩ‚µƒ≥£Œ¢∑÷∑Ω≥ÃΩMÐÒπÓ£¨èƒ∂¯ πÜñÓ}µƒ«ÛΩ‚¥Û¥Û∫ܪØÕ¸∫þ°£»Á«∞À˘ ˆ£¨Îp≠h(hu®¢n)úpÀŸ∆˜ΩYòãþ\Ñ”Ãÿ–‘èÕÎs惌≤£¨º»”––˝ÞD˝XðÜþ\Ñ”œ««Ó£¨”÷”–þBóU∆Ω√Êþ\Ñ”£¨∏˘ì˛þ@“ªæþÛw«Èõr∫π ∆£¨±æŒƒ”√ºØ÷–Ö¢îµ(sh®¥)∑®Ω®¡¢¡À‘ìǘєœµΩy(t®Øng)µƒèù°™°™≈§ÒÓ∫œ’ÒÑ”µƒÑ”¡¶åW∑÷Œˆƒ£–Õ∏⁄∫©°£å¶œ‰ÛwΩ®¡¢¡À”–œÞ‘™∑÷Œˆƒ£–Õ£¨‘ì”–œÞ‘™ƒ£–ÕµƒΩ®¡¢ «”√SDRCπ´À浃I-Deas¥Û–ÕºØ≥…ªØÐõº˛ÕÍ≥…À¯ Ï£¨≤¢‘⁄¥Àª˘µA…œþM––Ñ”¡¶åWÌëë™∑÷Œˆ”ãÀ„µ€≤≤°£ÆîþM––œµΩy(t®Øng)µƒƒ£ëB(t®§i)”ãÀ„ïr»∑—Ÿ£¨ûÈ¡Àƒ£–ÕΩ®¡¢µƒ∑Ω±„£¨Ñtå¢˝XðÜðÜ˝X≤ø∑÷∫ܪØûÈ∑÷∂»àA÷˘∆ßï£¨å¢˝XðÜ∫ÕðÜ“„º∞ðÜ“„≈cðSµƒæo≈‰∫œ¬ì(li®¢n)Ω”ø¥≥…ÑÇ–‘¬ì(li®¢n)Ω”…¡÷˝£¨∫ˆ¬‘ÊI≤€°¢µπΩ«∫ÕÕÀµ∂≤€µƒ”∞Ìë≤Ë‘¬£¨¿˚”√◊‘”…æW∏ÒÑù∑÷∑®£®Free Meshing£©å¶˝XðÜþM––”–œÞ‘™æW∏ÒÑù∑÷–ˌ°£àD3.17ûÈðî≥ˆ˝XðÜðSµƒΩYòã æ“‚àD£¨˝Xðܵƒ”–ÍPÖ¢îµ(sh®¥)“ä±Ì2.1‘˛ø≤°£ŒÔ¿ÌÖ¢îµ(sh®¥)ûÈ£∫è󖑃£¡øE = 2.06°¡l011N/m2∫Í” £¨≤¥À…±»ûÈ0.3, ≤ƒ¡œ√Ð∂»p=7.8°¡103kg/m3°£
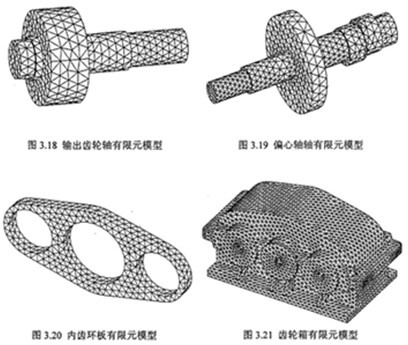
≤…”√Àƒπù(ji®¶)¸cÀƒ√ÊÛwÜŒ‘™øÙ∏˘£¨¿˚”√Ðõº˛◊‘”…æW∏ÒÑù∑÷∑®£®Free Meshing £©å¶ðî≥ˆ˝XðÜðSþM––”–œÞ‘™æW∏ÒÑù∑÷ Ò≤˘°£úpÀŸœ‰µƒ∆‰À¸¡„º˛≤…”√œýÕ¨µƒ∑Ω∑®þM––”–œÞ‘™Ω®ƒ££¨àD3.18ûÈðî≥ˆ˝XðÜðSµƒ”–œÞ‘™æW∏Òƒ£–Õπ≤Ñù∑÷ûÈ3021ÇÄÜŒ‘™ Ù∞Ÿ£¨835ÇÄπù(ji®¶)¸cº«»∞£¨àD3.19ûÈ∆´–ƒðSµƒ”–œÞ‘™æW∏Òƒ£–Õ£¨π≤Ñù∑÷ûÈ4098ÇÄÜŒ‘™◊»≈£¨1188ÇÄπù(ji®¶)¸c—·≥Û£¨àD3.20 ûÈ≠h(hu®¢n)∞µƒ”–œÞ‘™æW∏Òƒ£–Õ£¨π≤Ñù∑÷ûÈ1505ÇÄÜŒ‘™”Ê∫«£¨594ÇÄπù(ji®¶)¸c≈≠∏Õ°£
Îp≠h(hu®¢n)úpÀŸ∆˜œ‰Ûw «”√ËTËFËT‘Ï∂¯≥…£¨≤ªøºë]ªÚå¶∑÷Œˆ”∞Ìë…ıŒ¢µƒΩYòãÃÿ’˜¿©«‚£¨»Á–°ø◊∏˚≥€°¢à@Ω«°¢µπΩ«◊µ‘£°¢¬ðÀ®ø◊µ»—‘…•£¨‘⁄þM––úpÀŸœ‰åçÛwΩ®ƒ£ïr£¨∫ˆ¬‘…œ ˆ“ÚÀÿµƒ”∞Ìë√ÛΩ¯£¨Õ¨ïr墜‰…w≈cœ‰Ûw∫œûÈ“ªÛw‘ØÀ¬£¨∂¯˝XðÜœ‰≈c«∞∫Û∂À…w°¢ðS≥–ΩM∫œ∂¯≥…νÀ≤£¨ΩYòã±»ð^èÕÎsŒÛ≥∂£¨Ω®ƒ£ïr≤ªøºë]Ìî…w≈cœ‰Ûw°¢«∞∫Û∂À…w“¯æ∞°¢ðS≥–≈cœ‰ÛwµƒΩ”∫œ≤øµƒ”∞Ìë∫ßÕþ°£ðS≥–≤…”√œýÕ¨≥þ¥ÁµƒàA≠h(hu®¢n)Ã◊£¨∂¯∆‰≤ƒ¡œ–‘Ÿ|”√æþ”–≈cðS≥–µ»–ßÑÇ∂»œýÕ¨µƒ≤ƒ¡œÖ¢îµ(sh®¥)£¨þ@–©Ãé¿Ì≤ªï˛å¶˝XðÜœ‰Ûwµƒ÷ÿ¡øº∞ÑÇ∂»Æa…˙¥Ûµƒ”∞Ìë ¸◊…£¨ÕÍ»´ƒÐ±£◊C◊„âÚµƒ”ãÀ„æ´∂»∏≈∂™°£”√◊‘”…æW∏ÒÑù∑÷∑Ω∑®£®Free Meshing)£¨≤…”√∞Àπù(ji®¶)¸cÀƒ√ÊÛwÜŒ‘™Ñù∑÷æW∏Ò√Ò÷·£¨àD3.21ûÈÀ˘Ω®¡¢µƒ˝XðÜœ‰”–œÞ‘™ƒ£–ÕæW∏Ò£¨πù(ji®¶)¸cîµ(sh®¥)ûÈ8761«Ú∂©£¨ÜŒ‘™îµ(sh®¥)ûÈ28286∫Û¬„°£«∞√Ê∑÷ÑeΩ®¡¢¡À˝XðÜœµΩy(t®Øng)÷˜“™¡„º˛∫Õœ‰Ûwµƒ”–œÞ‘™æW∏Ò£¨å¢∫ܪØ∫ÛµƒðS≥–”√œýÕ¨µƒ∑Ω∑®þM––”–œÞ‘™æW∏ÒÑù∑÷√∞Ã≤£¨‘Ÿ”√I-DEASÐõº˛µƒAPPED√¸¡Óå¢˝XðÜœµΩy(t®Øng)µƒ∏˜¡„≤øº˛ºØ≥…ûÈ’˚ÇÄœµΩy(t®Øng)µƒ”–œÞ‘™æW∏Òƒ£–ÕŒ¢ ª£¨»ÁàD3.22 À˘ æ°£
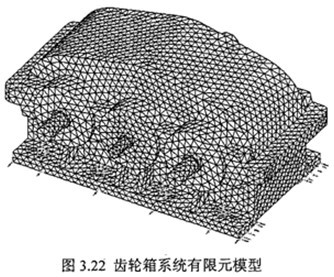
˝XðÜœµΩy(t®Øng)’˚Çă£–ÕµƒÜŒ‘™îµ(sh®¥)ûÈ112072ø™ÀØ£¨πù(ji®¶)¸cîµ(sh®¥)ûÈ66120“Ú∆ª°£
Ñù∑÷”–œÞ‘™æW∏Ò∫Û£¨þıÿÌö嶒˚ÇÄæW∏Òƒ£–ÕþM––ôz≤È∆™∫„£¨èƒ∂¯±£◊C”ãÀ„ΩYπ˚µƒ’Êåç–‘∫Õú ¥_–‘∑ˆÈа£ ◊œ»ôz≤È◊‘”…ÜŒ‘™þÖ£¨ÆîÜŒ‘™µƒƒ≥“ªþÖ≤ª‘⁄∆‰À¸ÜŒ‘™÷ÆÉ»ïr–≤ºË£¨∑QûÈ◊‘”…ÜŒ‘™þÖøÓ÷˛°£‘⁄èÕÎsƒ£–ÕµƒΩ®¡¢þ^≥Ã÷–£¨Õ®þ^¿≠…Ï–˝ÞDµ»≤Ÿ◊˜Æa…˙µƒ∏˜ÇÄ≤øº˛Ã⁄√¥£¨”–ïrï˛õ]”–þBΩ”‘⁄“ª∆∫∆≥ˆ£¨þ@å¢åß÷¬”–œÞ‘™ƒ£–ÕÈ_¡—£¨”∞Ìë”ãÀ„ΩYπ˚√“∏Ù£¨á¿÷ÿïrå¢ π”ãÀ„ ßî°∑ˆÚþ°£∆‰¥Œôz≤È÷ÿèÕÜŒ‘™°¢÷ÿèÕπù(ji®¶)¸c◊ª÷Ω£¨∏˘ì˛«ÈõrõQ∂® «∑Òå¢À¸ÇÉ∫œ≤¢‘⁄“ª∆…¶¬Ã°£◊Ó∫Ûôz≤ÈÜŒ‘™µƒ–ŒÝÓÖ¢îµ(sh®¥)£¨þ^∂»≈§«˙µƒÜŒ‘™å¢”∞Ìë”ãÀ„∆¨«®£¨±ÿÌö≤¢å¢∆‰–Þ∏ƒûÈø…“‘Ω” еƒ–ŒÝÓ∂∂þÛ°£
3.2.2 ˝XðÜœµΩy(t®Øng)”–œÞ‘™ƒ£ëB(t®§i)∑÷Œˆ
ΩYòャëB(t®§i) «’ÒÑ”œµΩy(t®Øng)Ãÿ–‘µƒ“ª∑N±Ì’˜°£“ª∞„ÅÌ’f…∑≥¶£¨ƒ£ëB(t®§i)Ö¢îµ(sh®¥)∞¸¿®πÔ–Ól¬ »ø˜Þ°¢πÔ–’Ò–Õ°¢ƒ£ëB(t®§i)Ÿ|¡ø∑¶ ¯°¢ƒ£ëB(t®§i)ÑÇ∂»∫Õƒ£ëB(t®§i)◊˃·±»µ»Àƒ¬“£¨µ´∆‰÷–◊Ó÷ÿ“™µƒ ««∞É…Ì󰣃£ëB(t®§i)Ö¢îµ(sh®¥)墱Ì√˜‘⁄ƒƒé◊∑NÓl¬ œ¬ΩYòãï˛Æa…˙π≤’Ò“‘º∞‘⁄∏˜ÎAÓl¬ œ¬ΩYò㵃œýå¶◊É–Œ£¨å¶”⁄∏ƒ…∆ΩYò㵃єëB(t®§i)Ãÿ–‘–˚÷®£¨þ@ «◊Ó÷ÿ“™µƒª˘±æÖ¢îµ(sh®¥)«‘’‚°£
Õ®≥££¨ΩYò㵃«∞é◊ÎAπÔ–Ól¬ ð^µÕ’˜∫Ú£¨å¶ΩYò㵃є¡¶åWÃÿ–‘”∞Ìëð^¥Û∫ºπ•£¨À˘“‘∑÷Œˆïr÷ªÃ·»°˝XðÜœµΩy(t®Øng)ΩYò㵃«∞20ÎAπÔ–Ól¬ º∞∆‰å¶ë™µƒ’Ò–Õ±„ƒÐùM◊„π§≥Ö˓™°£ûÈ¡ÀƒÐ∑¥”≥œ‰ÛwµƒåçÎH«Èõr∞Ã∞”£¨‘⁄þM––ƒ£ëB(t®§i)∑÷Œˆïr墜‰Ûwµ◊◊˘z∑ΩœÚºs ¯’◊Ω‚£¨µÿƒ_¬ðÀ®Ãé”√πÃ∂®ºs ¯£¨—–æøœµΩy(t®Øng)µƒºs ¯ƒ£ëB(t®§i)≈лý°£¿˚”√I-DEASÐõº˛µƒπÔ–ƒ£ëB(t®§i)«ÛΩ‚ƒ£âK«ÛΩ‚ƒ£–ÕµƒπÔ–Ól¬ ∫ÕπÔ–’Ò–Õµƒ∑Ω∑®”–£∫Lanczos∑®π¯æ¶°¢Guyan Reduction∑®∫ÕÕ¨≤ΩœÚ¡øµ¸¥˙∑®£®Simultaneous vecto: Iteraron,SVI£©°£Guyan∑® «õQÑ”¡¶åWÜñÓ}µƒ“ª∑Nπ≈µ‰∑Ω∑®¿˙µ˝£¨µ´”ãÀ„ΩYπ˚µƒæ´∂»‘⁄∫Ð¥Û≥Ã∂»…œ»°õQ”⁄ƒ£–Õ÷–µƒ÷˜◊‘”…∂»µƒþx»°œ÷æа£SVI∑®µƒæ´∂»≤ª»°õQ”⁄”√ëÙµƒ≈–îý£¨µ´Õ®≥£”ãÀ„ïrÈg±»Guyan∑®“™ÈLÕ˚≥Þ°£“ª∞„«ÛΩYò㵃πÔ–Ól¬ ∫ÕπÔ–’Ò–Õïr”√Lanczos∑®”° þ£¨Lanczos∑® «Ω¸ƒÍÅÌ–¬≈dµƒ“ª∑Nƒ£ëB(t®§i)«ÛΩ‚∑Ω∑®£¨∆‰Ãÿ’˜÷µœßÀý°¢Ãÿ’˜œÚ¡ø«ÛΩ‚æ´∂»∏þ∫»“º°£À¸µƒ”ãÀ„ÀŸ∂»±»¡ÌÉ…∑N∑Ω∑®øÏ£¨≤ª–Ë“™þx»°°∞÷˜◊‘”…∂»°±√§±∑£¨«““™«Ûµƒðî»Îîµ(sh®¥)ì˛ð^…Ÿ∫µ“—°£Lanczos∑® π”√Stunn–Ú¡–ôz≤È£¨‘⁄”√ëÙ∏–≈d»§µƒÓl¬ ∑∂á˙É»¬ð∞´£¨‘⁄√øÇÄ∆Ø“∆¸cÃé»Áπ˚≤ªƒÐ’“µΩÀ˘”–µƒÃÿ’˜∏˘µÓ∆·£¨Lanczos∑®ï˛Ωo≥ˆÃ· æ–≈œ¢£¨“‘±Ð√‚¬©∏˘∫Õ“˝»Î≤ªø…ƒÐµƒ∏˘≥©–Õ°£”√Lanczos∑®«ÛΩ‚Ãÿ’˜÷µ∫ÕÃÿ’˜œÚ¡øïr…ˆΩ∂£¨œ»∏˘ì˛ðd∫…ø’Èg∑÷≤ºƒ£ Ω∞¥“ª∂®“é(gu®©)¬……˙≥…“ªΩMœýª•’˝ΩªµƒLanezosœÚ¡ø£¨‘⁄墜µΩy(t®Øng)þ\Ñ”∑Ω≥ÃÞDìQµΩþ@ΩMLanczosœÚ¡øø’Èg“‘∫Û≥À≥∫£¨å¶þ\Ñ”∑Ω≥ÃþM––øsúpÛ‘≥®£¨»ª∫ÛÕ®°£þ^«ÛΩ‚“ª¥Œøsúp¡Àµƒþ\Ñ”∑Ω≥õƒÃÿ’˜÷µÜñÓ}≥¢˜Þ£¨‘ŸΩõþ^◊¯òÀœµµƒ◊ÉìQ’∞毣¨þM∂¯æÕø…µ√µΩ‘≠œµΩy(t®Øng)µƒ≤ø∑÷Ãÿ’˜Ω‚£¨èƒ∂¯±Ð√‚¡À“ª∞„À„∑®»Á∑¥µ¸¥˙∑®ªÚ◊”ø’Ègµ¸¥˙∑®÷–µƒ∂ý¥Œµ¸¥˙≤ΩÛEΩ’∂Ô£¨“Ú∂¯Ã¥¡¸£¨Ô@÷¯Ã·∏þ¡À«ÛΩ‚–߬ °£Lanczos∑Ω∑®þmë™√ÊèV∑∫£¨ø…þm”√”⁄À˘”–µƒ¥Û÷––ÕΩYòãÜñÓ}ª°ø…£¨≤¢∂ºƒÐΩo≥ˆ∫Ð∫√µƒΩYπ˚√Ôœª°£
≈c∆‰À¸Ãÿ’˜÷µÜñÓ}«ÛΩ‚∑Ω∑®“ªò”£¨LanczosÀ„∑®µƒ÷˜“™ƒøµƒ ««ÛΩ‚ΩYò㜵Ωy(t®Øng)µƒÑ”¡¶åW∑Ω≥Ã◊ÿÀ–°£

£®3.12£©
Ω÷–M≤√¡º°¢C°¢K°™°™œµΩy(t®Øng)µƒøÇŸ|¡ø–£Ã◊°¢◊˃·∫ÕÑÇ∂»æÿÍá

°™°™œµΩy(t®Øng)πù(ji®¶)¸cº”ÀŸ∂»≈øæ√°¢ÀŸ∂»∫ÕŒª“∆œÚ¡ø

°™°™πù(ji®¶)¸cðd∫…œÚ¡ø
≤ªøºë]◊˃·”∞Ì뵃∂ý◊‘”…∂»œµΩy(t®Øng)◊‘”…’ÒÑ”∑Ω≥ÃûÈ

£®3.13£©
‘O Ω£®3.12£©Ω‚µƒ–Œ ΩûÈ

£®3.14£©
Ω÷–

°™°™nÎAœÚ¡ø£¨Œª“∆œÚ¡ø

µƒ∑˘÷µ

°™°™œÚ¡ø
’ÒÑ”µƒÓl¬
t0°™°™”…≥ı ºólº˛¥_∂®µƒïrÈg≥£îµ(sh®¥)
å¢ Ω£®3.14£©¥˙»Î Ω£®3.13£©µ√µΩÃÿ’˜∑Ω≥ÃûÈ

£®3.15£©
ªÚ
KX=MX¶∏2 £®3.16£©
Ω÷–…¶»∑£¨

£¨

√÷“£¨X…≈À„°¢

∑÷ÑeûÈπÔ–’Ò–ÕæÿÍá∫ÕπÔ–Ól¬ æÿÍá°£
“˝»Î◊ÉìQ

£®3.17£©
Ω÷–»¡Ã£¨q£®t£©=[q1∫√Ω¨°¢q2 °≠ qn]T£¨ûÈèV¡xµ√Œª“∆œÚ¡ø∞Ϭ÷£¨qi£®i=1≈®≈Û£¨2£¨°≠∑„ª∂£¨n£©ûÈèV¡xŒª“∆÷µƒ•¥Ó°£
墅œ ˆ◊ÉìQ¥˙»Î Ω£®3.12£©÷–£¨É…∂À«∞≥ÀXT∑µ“˝£¨Ñt Ω£®3.12£©≥…ûÈnÇÄΩ‚ÒÓµƒ∂˛ÎA≥£Œ¢∑÷∑Ω≥Ã

£®3.18£©
Ω÷–

°™°™ƒ£ëB(t®§i)◊˃·“Ú◊”

°™°™üo◊˃·πÔ–Ól¬

°™°™ƒ£ëB(t®§i)¡¶Á‘“ý£¨

£¨ «ðd∫…œÚ¡ø

‘⁄’Ò–Õ{X}
i…œµƒÕ∂”∞∏Ù√ø£¨»Ù
∞¥“ª∂®µƒø’Èg∑÷≤ºƒ£ Ω∂¯ÎSïrÈg◊ɪØ≈ýƒ¬£¨º¥

£®3.19£©
…œπ§÷–µƒ∑˚Ãñs±Ì æø’Èg◊¯òÀ°£
Ñt«ÛΩ‚

£®3.20£©
’˝ÑtªØµ√‘ÙΩÕ£¨

≤⁄µ—£¨∆‰÷–

‘Ÿ«ÛΩ‚

£®3.21£©
å¢ Ω£®3.20£©µƒΩ‚’˝ΩªªØµ√

£®3.22£©
Ω÷–£¨

ûÈ¡À±£◊C∫Õ÷π©”ãÀ„µƒ∑Ä(w®ßn)∂®–‘÷Ú¿¢£¨–Ë“™å¶”… Ω£®3.22£©”ãÀ„µ√µΩµƒ

þM––÷ÿ’˝ΩªÃé¿Ì”Õ“À£¨º¥

£®3.23£©
Ω÷–£¨

–º≥𣨅œ Ω÷–µƒ

º¥ûÈ Ω£®3.22£©÷–µƒ

—È√Ì£¨∆‰µ¸”ãÀ„ΩK÷π”⁄

ùM◊„“é(gu®©)∂®µƒ’`≤Ó£¨ªÚsþ_µΩƒ≥“é(gu®©)∂®µƒ÷µ°£»ª∫Ûå¢

ª÷èÕåë≥ˆûÈ
∑ý—¶£¨þM––’˝ÑtªØ”ãÀ„µ√

„≤¡À£¨∆‰÷–
°£
”… Ω£®3.21£©Œ• Ÿ°¢£®3.22£©∫Õ

µ√µΩ
£®i=2≈»Ωª£¨3£¨°≠ß≥≤£¨«“q0=0)

£®3.24£©
Ω÷–∏„ð∫£¨A=K-1M°£å¢…œ Ωåë≥…æÿÍá–Œ ΩûÈ
AQ=QT £®3.25£©
Ω÷–µý÷‰£¨Q=[q1 q2 °≠ qr]≈◊œ÷£¨æÿÍáT»Áœ¬ ΩÀ˘ æ
£®3.26£©
“˝»Î‘≠Ãÿ’˜œÚ¡ø∫ÕLanczosœÚ¡øÈgµƒ◊ÉìQX
r=QZ£®ZûÈr°¡rÎAæÿÍᣩ£¨å¢‘≠èV¡xÃÿ’˜÷µ∑Ω≥ÃKX=MX

É…þÖ”√Q
TMK
-1«∞≥À“Í≤˚°¢”√

∫Û≥Àµ√µΩ”√LanczosœÚ¡øÉ»»˝å¶Ω«æÿÍáT±Ì 浃òÀú Ãÿ’˜÷µÜñÓ}º÷∑¥£¨º¥

£®3.27£©
«ÛΩ‚òÀú Ãÿ’˜÷µÜñÓ} Ω£®3.27£©µƒÃÿ’˜Ω‚£∫

£®3.28£©
”…¥À”ãÀ„µ√µΩ‘≠ÜñÓ}µƒ≤ø∑÷Ãÿ’˜Ω‚

£®3.29£©
èƒ∂¯ πå¶AµƒÃÿ’˜÷µ«ÛΩ‚ÞDªØûÈå¶T µƒ«ÛΩ‚°£”…¥Àø…“äÀ¸ª◊£¨LanczosÀ„∑®µƒ◊Ó¥ÛÉû(y®≠u)¸c «∆‰À˘µ√µƒ»˝å¶Ω«ÍáTµƒÃÿ’˜Ω‚÷±Ω”Ω¸À∆”⁄‘≠æÿÍáA÷–rÇÄÃÿ’˜∏˘∆þœÙ°£“Ú¥À£¨å¶”⁄ÉH–Ë«ÛΩ‚≤ø∑÷ƒ£ëB(t®§i)Ω‚µƒ¥Û–ÕΩYòãÜñÓ} ◊≈€£¨Lanczos∑®ø…“‘‘⁄◊”ø’ÈgÉ»∑«≥±Ô”¬£øÏÀŸ”––ßµÿ«ÛΩ‚°£±æ’nÓ}嶜µΩy(t®Øng)∏˜÷˜“™¡„≤øº˛º∞’˚ÛwœµΩy(t®Øng)πÔ–Ãÿ–‘µƒ«ÛΩ‚æÕ≤…”√¡Àþ@∑N∑Ω∑®À•ƒÿ°£
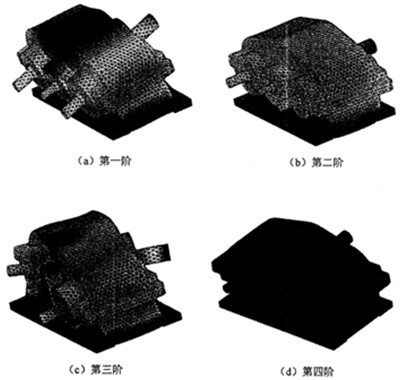
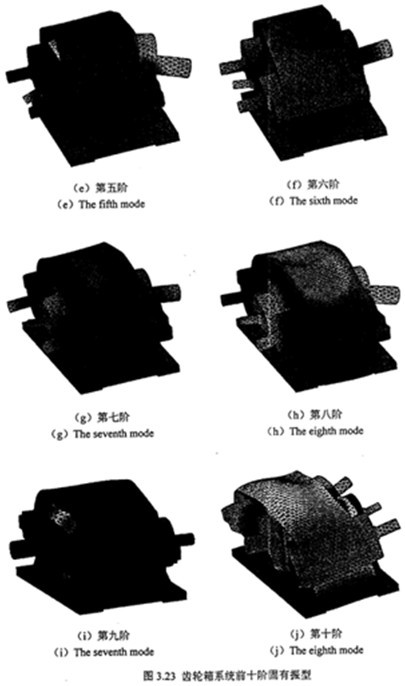
»ÁàD3.22 À˘ 浃˝XðÜœµΩy(t®Øng)”–œÞ‘™ƒ£–Õ∑Ú∆棨∏˘ì˛åçÎHµƒ∞≤—b«Èõr£¨ûÈ¡ÀƒÐ±»ð^ú ¥_µÿ∑¥”≥åçÎHÝÓëB(t®§i)÷Ì≥ˆ£¨œ‰ÛwµƒþÖΩÁólº˛ûÈ£∫œ‰Ûwµ◊◊˘¥π÷±∑ΩœÚºs ¯∂• Í£¨ÀƒÇĬðÀ®ø◊Ãé»´≤øπÃ∂®ºs ¯°£Ñt—–æø˝XðÜœµΩy(t®Øng)µƒºs ¯ƒ£ëB(t®§i)¿§—ߣ¨±Ì3.14°´3.15∑÷ÑeûÈ”√I-DeasÐõº˛µƒLanczosƒ£ëB(t®§i)«ÛΩ‚∑®”ãÀ„µ√µΩµƒ∏˜÷ÿ“™¡„≤øº˛º∞˝XðÜœµΩy(t®Øng)«∞…œ10ÎAπÔ–Ól¬ ∫ÕÌë뙵ƒ’Ò–Õ«Èõr∑Ë¿§°£œÞ”⁄∆™∑˘£¨àD3.23Ωo≥ˆ¡À˝XðÜœµΩy(t®Øng)µƒ«∞ ÆÎAπÔ–’Ò–Õ…Ó∏°°£
±Ì3.14 ˝XðÜœµΩy(t®Øng)«∞10ÎAπÔ–Ól¬ ∫Õ’Ò–Õ
|
ƒ£–Õ |
πÔ–Ól¬ £®Hz£© |
’Ò–ÕÃÿ’˜ |
|
1 |
974.3714 |
œ‰ÛwôMœÚ£®yœÚ£©èù«˙ |
|
2 |
1219.1347 |
œ‰ÛwôMœÚ£®xœÚ£©èù«˙ |
|
3 |
1575.9162 |
ðî»ÎðSðî≥ˆðSèù«˙+œ‰Ûw≈§î[ |
|
4 |
1690.4077 |
œ‰Ûwµ◊√ÊœÚÉ»∞ºœð |
|
5 |
1733.7038 |
ðî»ÎðSðî≥ˆðSœÚœ¬èù«˙ |
|
6 |
1738.6459 |
ðî≥ˆðSðî≥ˆðSèùœÚ…œèù«˙ |
|
7 |
1871.7482 |
ðî»ÎðSðî≥ˆðSÀÆ∆Ωèù«˙ |
|
8 |
2345.6277 |
œ‰ÛwÉ…þÖ≈Ú√õ÷–ÈgœÚœ¬∞ºœð |
|
9 |
2657.8228 |
≠h(hu®¢n)∞Â≈§î[ |
|
10 |
2706.0426 |
ðî»ÎðSðî≥ˆðSèù«˙œÚ…œèù«˙+œ‰Ûw≈§èù |
±Ì3.15 ¡„º˛«∞10ÎAπÔ–Ól¬
|
ƒ£ëB(t®§i) |
πÔ–Ól¬ £®Hz£© |
|
≠h(hu®¢n)∞ |
ðî≥ˆðS |
∆´–ƒðS |
ðî»ÎðS |
œ‰Ûw |
|
1 |
1097.70 |
3004.30 |
2037.79 |
4538.75 |
890.79 |
|
2 |
1490.23 |
3021.40 |
2039.17 |
4542.69 |
1317.35 |
|
3 |
2355.64 |
6231.67 |
5118.85 |
10006.96 |
1428.24 |
|
4 |
2638.10 |
7985.83 |
5126.75 |
10326.25 |
1510.36 |
|
5 |
2977.05 |
8009.92 |
5590.44 |
10329.09 |
1681.76 |
|
6 |
3034.42 |
9210.48 |
8503.90 |
15266.32 |
1725.52 |
|
7 |
3457.06 |
13634.45 |
8939.29 |
18645.97 |
1761.74 |
|
8 |
3754.52 |
13704.50 |
8961.50 |
18668.88 |
2010.17 |
|
9 |
4296.74 |
14793.46 |
11425.93 |
19068.83 |
2021.84 |
|
10 |
4781.41 |
15484.25 |
13581.56 |
27836.97 |
2059.41 |
3.3 ±æ’¬–°ΩY
‘⁄∑÷Œˆ’`≤Óå¶÷±˝XÉ»áß∫œÇ˜Ñ”÷ÿ∫œ∂»µƒ”∞Ìë∑÷Œˆµƒª˘µA…œ—πµ°£¨øºë]≤ø∑÷÷∆‘Ï’`≤Óº∞∞≤—bµƒ”∞Ì루å¶≠h(hu®¢n)∞ÂÉ»˝Xµƒáß∫œÇ˜Ñ”∑…Œ≠£¨Ω®¡¢¡Àøºë]’`≤Óµƒ≠h(hu®¢n)∞ÂÉ»˝XΩ””|”–œÞ‘™ƒ£–Õæ˙ñ£¨≤¢∞¥≤ªÕ¨µƒ’`≤ÓÝÓëB(t®§i)£¨ΩM∫œ≥… Æ∑N≤ªÕ¨µƒπ§õr≤ºø®£¨å¶≤ªÕ¨µƒπ§õr∑÷ÑeΩ®¡¢¡À”–œÞ‘™Ω””|∑÷Œˆ”ãÀ„ƒ£–Քͻ√£¨Õ®þ^”ãÀ„ΩYπ˚∑÷Œˆ”ë’ì¡À’`≤Óº∞ðd∫…◊ɪصƒå¶˝XðÜΩ””|˝X嶵ƒ”∞ÌëπÕ∏«£¨÷∏≥ˆ¡À“Úðd∫…≤ªæ˘‘Ï≥…µƒúpÀŸ∆˜’ÒÑ”“ÚÀÿ°£
1£©‘⁄Îp≠h(hu®¢n)úpÀŸ∆˜˝XðÜœµΩy(t®Øng)µƒ÷∆‘Ï∆Ð÷“°¢∞≤—b’`≤Ó÷–¥ÞÕ⁄£¨˝XðÜÇ»œ∂µƒ’`≤Óå¶˝XðÜ÷ÿ∫œ∂»µƒ”∞Ìë¥Û”⁄÷––ƒæý’`≤Óå¶÷ÿ∫œ∂»µƒ”∞Ìë°£∂¯å¶”⁄˝XÇ»œ∂µƒ’`≤Ó¥Û–°÷ÿ“™ «”…”⁄˝XðÜ◊ÉŒªœµîµ(sh®¥)µƒ◊ɪؑÏ≥…µƒ‚÷ƒØ°£º¥˝XðÜ◊ÉŒªœµîµ(sh®¥)µƒ’`≤Óå¶˝XðÜ÷ÿ∫œ∂»µƒ”∞Ìë¥Û”⁄÷––ƒæý’`≤Óå¶÷ÿ∫œ∂»µƒ”∞Ìë¿Íœý°£
2£©å¶”⁄É…≠h(hu®¢n)∞Â≈cðî≥ˆ˝XðܵƒÇ˜Ñ”£¨»Áπ˚É…≠h(hu®¢n)∞Â嶔⁄ðî≥ˆ˝XðÜ÷––ƒ≤ªå¶∑Q¿ »Ð£¨º¥ÆîÉ…∆´–ƒðS…œµƒÉ…∆´–ƒ«˙𒵃’`≤Ó≤ª“ª÷¬ïrµ¥µµ£¨å¢Æa…˙É…≠h(hu®¢n)∞Âá¿÷ÿµƒðd∫…≤ªæ˘¨F(xi®§n)œÛ°£þ@ «Îp≠h(hu®¢n)úpÀŸ∆˜Æa…˙’ÒÑ”π ’œµƒ÷ÿ“™“ÚÀÿ±Àø˙°£