���h(hu��n)�p������ģ���ӑB(t��i)��������Ԫ����Ӌ��
��3-1 ����
�����h(hu��n)�p�������ϵ�y(t��ng)�M������c���ķ����c�о���꣬���ȱ�횽����䔵(sh��)�Wģ����ա����(sh��)�Wģ������Փ��ģ��ԇģ���ԯ�������^����Փ��ģ��ָ�ɽY�����Cе���OӋ�D�����l(f��)���㣬������Ҫ�ļٶ��c��������������(j��)���Wԭ����ģ����ԇģ�nj����ϵ�y(t��ng)�M�м�����Ȭ��ͨ�^�]���@��ϵ�y(t��ng)��ݔ��̭̱��ݔ����(sh��)��(j��)����ٽ�(j��ng)�^�������ķ�����ɷ��̎����������ģ�͡��@��������������cſ�磬�ɷքe�m�����Լ����c����r��ʡ���ڴˣ��҂��HӑՓ�����h(hu��n)�p�������ϵ�y(t��ng)�M����Փ��ģ������SUN����վ����I-DEASܛ��������Ԫģ�K�����w��ģģ�K��SHQ40��ģ��Ӌ�����ѣ���ԇģ�҂����ڵ�������ӑՓ��
��3-2 �������ϵ�y(t��ng)�ķ���
���ϵ�y(t��ng)�д_���Ժ��S�Cϵ�y(t��ng)�ɴ���������@������҂���ҪӑՓ�_�������ϵ�y(t��ng)���_�������ϵ�y(t��ng)ͨ���֞�ֲ�����(sh��)���ϵ�y(t��ng)���xɢ��Ӄɴ�����룬��ͬ�����ϵ�y(t��ng)�����������������������硣
��3-2.1 �ֲ��ܔ�(sh��)���ϵ�y(t��ng)
���зֲ��|(zh��)�������Ժ������ϵ�y(t��ng)��ð���Q��ֲ�����(sh��)���B�m(x��)����(sh��)ϵ�y(t��ng)���ա�����D��ÿһ�c�����M�����µ��\���ַ���ߺ�ɡ�

��3.1��
ʽ�У�U��p��t�����������cp��λ�Ƽ佥�������M���߅��l���ǣ�
B����[u��p��t��]=0��������i=0���ڣ�1��2����������p���ΰꣻ
L��һ�����Ե�2P�A�R�Δ�(sh��)�����ӣ���������ϵ�y(t��ng)�Ą��ȷֲ����ԣ�
C��һ�����������L��2P�A�����R�Δ�(sh��)�����Ӻ��ܣ���������ϵ�y(t��ng)������ֲ���
M�������R�����������£���������ϵ�y(t��ng)���|(zh��)���ֲ��߳壻
f��p��t�������ֲ����������ţ�

A
1���ɣ�A
2������������x��y������z�ĺ���(sh��)��ɣ�
x��y���裬z����p�c�����˲�Į����p��x��y���⣬z���ǻ
B1���������R�������ӣ�
��ʽ��3.1����֪�������ֲ�����(sh��)ϵ�y(t��ng)���\������ƫ�ַ��́����������ɣ��@��\�ӷ������������ą���(sh��)��ͨ���ǿ��g׃�����B�m(x��)����(sh��)���ơ��ֲ�����(sh��)ϵ�y(t��ng)���Пo�������ɶ��ʱ�����ԣ��cһ���ֲ�����(sh��)ϵ�y(t��ng)�����������������ɿɔ�(sh��)��Ȼ���ǟo��������ֵ�����������M���졣
���˫@�ÿɿ������͡����_�ķֲ���ϵ�y(t��ng)�Ĕ�(sh��)�Wģ�ͣ����辫�_�ش_���\�ӷ����еĸ�������(sh��)�����������������������ԇģ����������Ӆ���(sh��)�R�e���g��һ����Ч�ķ�����ӽ��ͨ�����ֲ�����(sh��)���ϵ�y(t��ng)�ą���(sh��)�R�e�����У����������ֲ�����(sh��)ϵ�y(t��ng)�xɢ�����ܣ��@���xɢϵ�y(t��ng)��ģ��������Ȼ���R�e�xɢģ���еą���(sh��)���c�������������⣻������ֱ���ԏIJ�����(sh��)ϵ�y(t��ng)��푑��R�e�ֲ�����(sh��)ϵ�y(t��ng)�\���ַ����еĸ�����(sh��)�����������������R�e�c���H�ֲ�����(sh��)ϵ�y(t��ng)�������xɢģ�͵����������壬Ȼ�������R�e����������R�e�����еĸ�������(sh��)������
һ���ֲ�����(sh��)ϵ�y(t��ng)�Пo����������ֵ�c�������������������ǣ��˂��������R�e��ȫ�������������ͨ�����R�e�cԓϵ�y(t��ng)�����ĵ��A����ֵ�������������ࡣ���⣬Ŀǰ�ļ��gˮƽ߀���ܝM��ֲ�ʽ�y����Ҫ��������ե�٣����R�e����߀�ý������xɢʽ�y������ɡ�
��3-2.2 �xɢ���ϵ�y(t��ng)
�ֲ�����(sh��)ϵ�y(t��ng)��һ���dz����s��ϵ�y(t��ng)�ķ������o��ӷ�������Ӆ���(sh��)�R�e�����˺ܴ����y���棬��Ҫ���F(xi��n)�ڣ���1��ϵ�y(t��ng)�đT�ԡ�������ө�������佣�����������\�Ӷ���ه�ڿ��g���ˣ��������(sh��)�W���^�y̎����ƫ�ַ��̼����s��߅��l����½���������һ����r�£����������ĺ��νY�������������y�@�Ç���ķ��]��ʽ�Ľ�����2�������ܫ@�÷ֲ���푑��y�����o���������⡣��������H����ӷ�������Ӆ���(sh��)�R�e�r�ƾ���ͨ�����o�������ɶȵķֲ�����(sh��)ϵ�y(t��ng)�xɢ���������ɶȵ��xɢ���ϵ�y(t��ng)ͱҸ���ѷֲ�����(sh��)ϵ�y(t��ng)�xɢ��һ�������N������
һ�������|(zh��)����
�ѽY�����|(zh��)���քe�����������c���γ����ނ��|(zh��)�c�ļ��Ѕ���(sh��)ϵ�y(t��ng)��ʣ���|(zh��)��Ԫ����į������Ԫ��������Ԫ���քeֻ�БT�ԡ����Ժ��������ԣ�
�������V�x���˷�
�ѽY����׃�ηֽ��һϵ�о��й̶���ʽ�ĺ���(sh��)���ᣬ���ԏV�x���˱�ʾ�Y����׃�Ρ��@�N������˼���mȻ��Փ����Ҫ���]�o���Ӱ���������H��ֻҪ���]���ގ�헼��ɫ@�þ�����ȵ�Ӌ��Y��������������Ɲ����ɾ��ģ�B(t��i)���˷��Ⱦ��ᡣ
��������Ԫ��
���Թ����Dԭ�팧�����������շ����ճ飬�����xɢ���ϵ�y(t��ng)��һ���\���ַ���ʽ��
1.�oԴϵ�y(t��ng)�\���ַ��̣�
a.ճ������ϵ�y(t��ng)�\���ַ��̣�
M

+��C

+Kx=f��t�� ��3.3��
b.�Y������ϵ�y(t��ng)�\���ַ��̣�
M
+��K+jD��x=

��3.4��
c.����ϵ�y(t��ng)�\���ַ��̣�
M
+Kx=f��t�� ��3.5��
2.��Դϵ�y(t��ng)�\���ַ��̣�
M
+��G+C��
+��K+H��X=f��t�� ��3.6��
��ʽ�У�M�����|(zh��)����ꇴ�����������ꇣ�
C����ճ����������飬�����Q����ʽ��������������
D�����Y�������ꇣ������Q����ʽ�����������Խ���
K�������Ⱦ�ꇼ��ʣ������Q����ʽ��붨��ꇣ�
G=-GT�������ݾ���蹵�������Q����к��
H=-HT����ѭ�h(hu��n)��ꇣ������Q���������
f��t���������������Ţ�ţ�
X��
ϯ����
�����քe��λ������ʷ�ޡ��ٶ������ͼ��ٶ�������
���ڟoԴϵ�y(t��ng)���ţ���ϵ�y(t��ng)����һ�\�ӕr���ޣ�D���ٳ��F(xi��n)�������ϵ�y(t��ng)�д��ڂ��f���ʵ������������Sζ�ۡ������c�b�Õr�����γ�����Ч����ѭ�h(hu��n)�����࣬�@�rϵ�y(t��ng)�ͳɞ���Դϵ�y(t��ng)Ժ֩��
��3-2.3 �xɢ���ϵ�y(t��ng)��ģ�B(t��i)��������
�HӑՓ�o�����xɢ���ϵ�y(t��ng)���o�����������ϵ�y(t��ng)�\���ַ�����ʽ��3.5���_���飺
M
+Kx=0 ��3.7��
����ʽ��飺
x��t��= ��ejwt
���ǵã�
��-��2M+K����=10 ��3.8��
���������̞飺
det��-��2M+K����=10 ��3.10��
�����ʽ������ֵ���ߣ������xɢ���ϵ�y(t��ng)�Ĺ����l�ʦ��ɰ���Ȼ�ش���ʽ��3.8���Ϳ��ܽ���������;�ꇧ����£��t�ɦء���͘��������ϵ�y(t��ng)����ģ�B(t��i)����(sh��)š�������ڸ��A�������ͧ��ç�����мә��������|(zh��)�������Ǿ��Ԫ����İ�̼����ô�Ϳ��ɹ������ͧ昋��һ��n�S���g����������������������һ��������ϵ���Q֮�����ģ�B(t��i)����ϵ���㡣���nj�����ԭ��������ϵ����һ����x��t���ܼ壬��n�S���g�У��ɱ�ʾn�A�������͵ľ��ԽM�ϳ��ϣ�����
x��t��=

��3.10��
ʽ��q����ģ�B(t��i)λ������������
��ʽ��3.10������ʽ��3.5��������

ǰ�˿ɵã�
diag��mi��

+diag��ki��q=

f��t�� ��3.11��
����ʽ��֪���ڌ�ģ�B(t��i)����ϵ���ң�����������ϵ�������\���ַ�����ξ��׃��n������������ϵĄ��\�ַ��̡���ʽ��3.11���ɴ_��qϵǹ������ʽ(3.10���ɴ_����������ϵ�µ�푑�X(t)ȸ�ڡ�ʽ��3.10������������ϵ����ģ�B(t��i)����ģ�B(t��i)����ϵ֮�g��D�Q����Ҫ�Pϵʽ��
��3-3 ���h(hu��n)�p�������ϵ�y(t��ng)�Ĕ�(sh��)�Wģ��
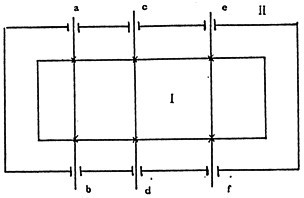
����(j��)���h(hu��n)�p�����ĽY��ԭ��˽ү����D2-3��a����b���͈D2-4��a����b����ʾ���ס��҂��������ϵ�y(t��ng)��(sh��)�Wģ�ͽ�����D3-0��ʾ��
�D3-0 ���h(hu��n)�p�������ϵ�y(t��ng)�̌Wģ��
ԓģ���ɢ����𡢢�ɂ���ģ�ͽM��Ȼ�ǣ����Т���ģ�͞����朼��丽�����֣�����ģ�͞����w����ǡӡ����������ģ���gͨ�^�S�c�S����a��bưȦ��c�̴���d��eɺ����f̎�o��(li��n)�Ӷ��������h(hu��n)�p�������ϵ�y(t��ng)��(sh��)�Wģ��������
����ģ�����ϵ�y(t��ng)�����ɷֲ�����(sh��)���ϵ�y(t��ng)��δ���������H�Ĕ�(sh��)�Wģ�͑���ʽ��3.1�����������أ����ڌ��H����ӷ�������Ӆ���(sh��)�R�e�r�������҂�����ɂ���ģ�Ͷ������xɢ���ϵ�y(t��ng)�����]������ʽ��3.2������3.6�����_���������Ĕ�(sh��)�Wģ�ͼ�����
һϴ§������ģ�����ϵ�y(t��ng)��(sh��)�Wģ��
�ɈD2-2���D2-3��a����b�����D3-0����֪��Ū������ģ����Ҫ�����朼��丽����Ĵ�����ڂ��fϵ�y(t��ng)���\�Ӻ̈́�������������ӽY����ԭ���������(j��)ʽ��3.2���ɵâ���ģ�͵Ĕ�(sh��)�Wģ�͞飺

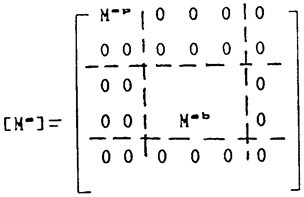
��3.12��
ʽ�У�J

�����T�Ծر��ѣ�
C

����ճ�������أ�

�����S��ˢ���h(hu��n)�受�Ծؼ�ӿ��

������(li��n)��̎���Ծأ�

����݆�X���Ծؿ�dz��
Mgg�������X���R�e��������������
Mgf�������X��Ħ������������أ�
Mrf������(li��n)��̎��Ħ�����ط�����
Mb�����S�зǾ��Ԅ�������ď��Ծؾ�ҽ��
MD������������S����������
Mx�����p�����C���~��_�������ٳ���
M������缤�����ؽ�����
ʽ��Mx�ij����䌦����ģ��ɵ�Ӱ��ڵڶ���������Փ����
���и�������ģ�����ϵ�y(t��ng)��(sh��)�Wģ��
�ɈD2-2���ɡ��D2-3��a����b������D3-0����֪������ģ�͞����w�Y�����ޣ��@Ȼ����ģ�͞�oԴ���ϵ�y(t��ng)���֣��ʿɸ���(j��)ʽ��3.2������3.3����������3.4����������3.5��֪�䔵(sh��)�Wģ�͞�
M
+ C
+Kx=F��t�� ��3.13��
M
+ Kx=0
ʽ�У�M
�����T������
C
����ճ���������ε���
Kx�����������ϲ���
F��t��������缤������
������������˹������ģ���g�Pϵ
�ɈD3-0��֪��������������ģ���g��aճ�ҡ�b��ʡ�c��d��ͳ��e¹��f̎�o�����B�������缤����F��t�������ɢ�ͨ�^a������b�յc��d���ơ�e��Ϯ��f̎�����ڢ���ģ�Ͷ�����ģ�ͨ�^������ģ���M�з�����Ӌ�����ļ�����F��t�����⣬��F��t��������ʽ��3.13�������ͿɌ�����ģ���M�ЄӑB(t��i)���Եķ���Ӌ�㡣
F��t����ҪͬMgg�˺���Mgr��µ��Mrg��Mrf����Mbɢ����MD��Mx�ȽM�����죬�ڱ��о��вǺ٣��҂���ԇ�ķ������_��F��t���Ĵ�С��Ҋ�����±�黡�
�����������п�֪�����������h(hu��n)�p�������ϵ�y(t��ng)�У�����ģ���Ǯa(ch��n)����Ӻ����ĸ�Դ���ܷʣ�����ģ��������c�������w���ǡ��ڵڶ����У��҂��ѷ����ˢ���ģ�ͮa(ch��n)����ӵ���������ԭ��dz�����ڱ������҂��HӑՓ����ģ���ܼ��������c�����}��
��3-4 ���h(hu��n)�p�������w��Փ��ģ������Ԫ��FEM��������
��3-4.1 ���w�Y��
���^�Ě��w�Y�����x���ڃɂ�����С�g��������p��֮�g�����]ʽ�w��DZ���@�ɂ������g�ľ��x���ã����ǚ��w�Y���ĺ�ȡ��������c�Y����������ߴ���Ⱥ�С��Ԓ�ݸ��ô�@�����w�Ͷ��x�鱡���Y����������֮�t��Y�������w�Y�����|(zh��)����һ�N���ɱ����D�������ĽY����ϡ���䷨�Ƿ�����һ�_ʼ�͌��������Ɇ��������p���������Աա��mȻ�P�ڑ����͑�׃�ؙM��ֲ��ļ��O��Ȼ�������ᣬ���w�������d�ɵķ����s�cƽ����ȫ��ͬ��ƽ�К��w�������õđ��������F(xi��n)�ڮa(ch��n)�����淨����ķ������أ������@һ��������ƽ�����d�ɵĴֺ��ԡ��@���ǚ��w������d�Y�����^��(j��ng)�������ܵ��V�����õ�ԭ����¡�
�V�������ڹ��I(y��)�е��X݆�����b�õ����w�Y���ɾƣ�����(j��)ʹ�È��ϵIJ�ͬ���еľͿ������隤�w�Y����̎����裬����һ�����w�IJ��϶��Ǿ��|(zh��)��Ӧ������ͬ�Ժ���ȫ���Եģ���һ��������(n��i)�����@�Ӿ����ڌ����w���������з���Ӌ�������
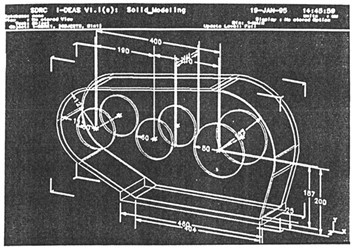
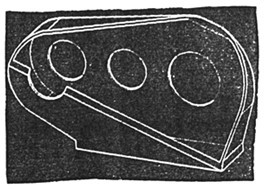
���о��е�SHQ40�����h(hu��n)�p������D6-4��a����b�����D3-1��ʾ��ѷ�������w���L���߳ߴ�քe��708mm��147mm��385mmĴ��ȃH��8mm�������������@���҂��������鱡���Y�����M���о����Է�����ӑB(t��i)���Աͽ���
�D3-1 SHQ40���w�ߴ�D
��3-4.2 ���h(hu��n)�p�������w�Y������Ԫ��FEM������Փ����
�������h(hu��n)�p�������w��������ģ�����ϵ�y(t��ng)�������|(zh��)����һ���B�m(x��)�����ϵ�y(t��ng)��̭���҂���회����xɢ�������xɢ���ϵ�y(t��ng)���M�з���Ӌ�㴵ӭ���@�҂����ڵڶ���(ji��)��Ԕ��ӑՓ�^�ˡ����@�����ʣ��҂���������FEM�������w�xɢ�����w�Y���ϵ�y(t��ng)�M����Փ�ϵķ�����Ӌ�����㡣
һ�����h(hu��n)�p�������w�Y������Ԫ����FEM����Փ����
���^������Ԫ�����ѣ����˼�x��έ�����Ǽ��O���w�����w�Y������һϵ�б���СԪ�ؽM�ɱ������Q����?y��u)�����Ԫ�ء��@ЩСԪ��ͨ�^���������ϵ�һЩ�c�B���������@Щ�c�Q�鹝(ji��)�c���ᡣԪ���g����B�ӱ�횝M�㽻�����Ϲ�(ji��)�c���ƅf(xi��)�{(di��o)�l����(ji��)�c����ƽ��l����Ԫ������һ�c��λ���ù�(ji��)�cλ�Ʊ�ʾ�Ӵ���ȡ��(ji��)λ�ƞ�V�x���������Ï���λ�ܺ̈́��ܹ�ʽ����Ԫ�ص��|(zh��)����ꇡ����Ⱦ�ꇾ��⡣��Ԫ���|(zh��)����������Ⱦ�ꇵĻ��A�ϣ�����(j��)�������Ϲ�(ji��)�cλ�ƅf(xi��)�{(di��o)�l����(ji��)�c��ƽ��l���M�b��ϵ�y(t��ng)�Ŀ��|(zh��)����ꇺͿ����Ⱦ��Ƽ�ġ������ʷң��xɢ���ϵ�y(t��ng)�ď������|(zh��)���ÿ����ȼ���ꇁ������������T�����|(zh��)���ÿ��|(zh��)����ꇁ��������������|(zh��)���������ꇁ��������ơ��ɴ�ǿ��������Ӌ������ϵ�y(t��ng)�Ĺ���ģ�B(t��i)����(sh��)��
�����w�����w�Y���M������Ԫ�xɢ��̎��r������������Ԫ��ƽ��Ԫ�ɴ��������@Ȼ��������Ԫ�xɢ���w�����w�Y�����ӽ��ڌ��H��r�Ͱ֣�������������Ԫ�rҹĹ������(j��)������Ľ��ƵIJ�ͬ�͕������S���ͬ�Ĺ�ʽϵ�y(t��ng)���o����Ӌ�㎧����һ�������yп�£���������Ԫ��Ӌ�����@�ɹ������Ӻ���̩��������ƽ�暤Ԫ�팦���w�����w�Y���M���xɢ��̎��r��ֻҪ����Ԫ�سߴ��С���m���ǣ�����ƽ�暤Ԫ�������������`���c���B�m(x��)ϵ�y(t��ng)�xɢ��̎�����������`����ͬһ�A��ʫʵ���ҷ���Ӌ����ĺ����ˡ��C������ң�룬�҂�����ƽ�暤Ԫ������ģ���M������Ԫ�xɢ��̎�����ǡ�
ƽ�暤Ԫһ��a(ch��n)�����������(n��i)�ɷN׃�Σ�����(j��)���߲�����ļٶ��ǵʣ��҂��ڷ����r�ɷքe̎��ַ֮�ҡ�
ƽ�暤Ԫ����(j��)��(ji��)�c��(sh��)�IJ�ͬ�ɷ֞龀�ԣ�һ�Σ������λ�����A�ε�Ԫ������(j��)�Π�IJ�ͬ�ɷ֞������λ�բ����ꇻ�e���Π�ȡ����@��α�ڣ��҂�����(j��)���h(hu��n)�p�������w�Y�������c���҂����H�о�����Ҫ���ߣ��þ��Ա�������Ԫ�����h(hu��n)�p�������w�Y���M������Ԫ�xɢ��̎������������D3-2ʾ�͈D3-9ʾ����
��ɴ�ҡ����h(hu��n)�p�������w����Ԫ���ƌ�
�����h(hu��n)�p�������w�M������Ԫ��Փ����Ӌ��ľ��w���E�������£�
1���þ���������Ԫ�����w�xɢ�����衣
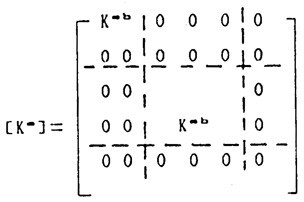
2DZ�����γɾ���������Ԫ�Ą��Ⱦ��[K��]��5�|(zh��)�����[M��]
���Ա�������Ԫ����ͬ�r���ܡ����(n��i)�����͏������ñͿ�����D3-2����a�����š���b����ʾ��
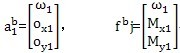
���ȿ��]���(n��i)�������µ���r����D3-2��a��ʾ���ţ���׃��B(t��i)�ɸ���(ji��)�c��λ��u�ƱᣬvΨһ����������(ji��)�c��f��p�飺
f��p=K��pap ��3.14��
�@�
��Ƶر��ƣ������]���������µ���r�r��㣬��D3-2��b����ʾ����׃��B(t��i)��Z����Ĺ�(ji��)�cλ�Ʀؼ��ɂ��D�Ǧ�xѪ������yΨһ�������ȱ�a(ch��n)��������͵Ą��Ⱦ�ꇣ�
f��b=K��pab ��3.15��
�@�
�D3-2 ���Ա�������Ԫ
�ڽM�������ɂ����ȶ��֮ǰ���Ѓ��c��ע����ͣ�����(j��)���Ա���Ԫ��������ļٶ�Σ�ޣ����ȣ��������(n��i)����Ҏ(gu��)����λ�Ʋ�Ӱ푏���׃�βس磬�ҷ�֮��Ȼ����η��ţ��ڃɷNģʽ�ж��࣬�D�Ǧ�z�������酢��(sh��)�M��׃�ζ��xʽ�����F(xi��n)���҂��ٿ��]�@һ�D�Ƿ�����һ��������Mr�c�䌦���ճ����t��(ji��)�c��λ�ƞ飺
��3.16��
�����������飺
��3.17��
�t�Ɍ���ʽ�� f��=k��a ��3.18��
ʽ�Є��Ⱦ�ꇞ飺
��3.19��
ͬ�ӷ������Ԍ����|(zh��)����ꇞ飺
��3.20��
������ʽ�ķ�����ȫ�����ھֲ�����ϵ��o��ڣ�xð����y��z�����M�еľ��飬�ٌ������ϳ�����ϵ�y(t��ng)��Ԫ��֮ǰ���ˣ���׃�Q�����w����ϵ��o�䣬x�����أ�y�佯�飬z�䣩�У��O�ֲ�����ϵ�c���w����ϵ�g���D�Q��ꇞ�[L]��Я���t�ڿ��w����ϵ�І�Ԫ�Ą��Ⱦ��K������|(zh��)����M�����Ѣ��
[K����] =[L]T[K��][L] ��3.21��
[M����] =[L]T[M��][L]
�@���҂��Ϳ��Եõ���Ԫ�ڿ��w��ϵ���\�ӵķ���ʽ�飺
[M����]x����+[K����]x��=0 ��3.22��
Ȼ���Mһ�����Ԙ����������ģ��ϵ�y(t��ng)���\�ӷ���ʽ��
[M]x+[K]x=0 ��3.23��
ʽ��3.23���c������(ji��)�н����Ģ���ģ�͵Ĕ�(sh��)�Wģ��ʽ��3.13����һ�ӵģ�������ϵ�y(t��ng)���\�ӷ���ʽ����ܣ����ٌ�����ģ�ͼ���߅��s���l�������M������Ԫ��Ӌ���˱��ꡣ
��ʽ��3.22���҂���ʽ��3.10�������D������ģ�B(t��i)����ϵ��Ϳ�������ģ�����ϵ�y(t��ng)�Ĺ���ģ�B(t��i)����(sh��)��ɳ��
����Ȱ�����h(hu��n)�p�������w�Y����߅��l��
���h(hu��n)�p����һ������ڻ��A��Cеϵ�y(t��ng)��ij����λ�ϣ�ͨ�^���w�װ����ݿ�����˨��λ�������ڴ�ɥ�ã��҂��ٶ����h(hu��n)�p���������ڄ��ԟo��Ļ����Ͻ��ˣ������w��˨�����w�װ���Ă�߅���϶�λ����D3-3��ʾ������
�D3-3 ���w�װ�s���D
�װ����ϱ����Ă����cA1��ա�B1��C1��ɴ��D1���±����Ă����cA2ج�塢B2��C2���ơ�D2��x��̼Я��y���z���ƽ�����ɶȞ��㣬���D���ɶ�����Ĺ�ҡ���D3-10��ʾ�ٳ���
�@���҂��Ϳ��Ԍ����h(hu��n)�p���������M������ԪӋ���ˡ�
���о��н��ģ��҂������h(hu��n)�p����SHQ40������SUN����վ���\��I��DEASܛ���M������Ԫ��ģ���־W(w��ng)��Ӌ�㡣
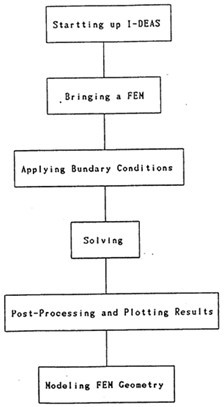
��3-5 I��DEASܛ��ϵ�y(t��ng)�Y���M��
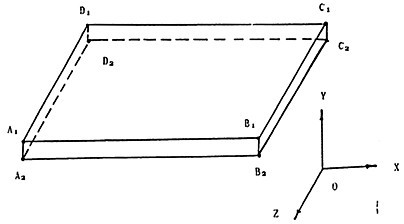
ʹ��I��DEASܛ�������ɲ٣�����������ĸ����OӋ������ϵ�y(t��ng)Ԕ���z����^����ŭ�꣬�Д���u�r�OӋ��������ʹ��I��DEASܛ��ϵ�y(t��ng)�M�������OӋ�^���������������OӋ�A�Ϋ@�õ���Ϣ�S�r������������˸��
����I��DEASܛ��ϵ��ÿ��ܛ�����壬���ṩ�����õ��˙C�����Զиڡ�����D�ξ��ᡢ�ˆ��ӵ�ģ�K���@Щ���弰������ģ�K��r������ʾ��
һ��ǿ��Solid��Modeling���w��ģܛ������é�ɣ�
����Drafting �L�Dܛ�������
��ϵ�ߡ�Numerical��Control��(sh��)��ܛ�����壻
��н�С�FE��Modeling��and��Analysis����Ԫ��ģ�c����ܛ�������ƾ���
�塢Frame��Aralysis��ܷ���ܛ������شţ�
��Ϭ����System��Dynamics��Anadysisϵ�y(t��ng)�ӑB(t��i)����ܛ�����壻
�ߡ�Plastics��Aralysis���Է���ܛ���������磻
��Ŭʾ��Test�yԇ����ܛ�����塣
��3-6 SHQ40�����h(hu��n)�p�������w������D6-4��a�����ꡢ��b����ʾ���͡��ڌ����M������Ԫ��ģ�r���҂��������c���O��
1��ġ����O���w�ϸ�����w�g����˨����(li��n)�ӣ��ڽ�ģ�r�������w�����]̷�ԣ�
2���ʡ����w����ĸ�̎�ļ����|(zh��)���ڳ���Ӌ��r���迼�]��
�����ϼ��O��������ģ���������϶��c���H�Y����һ�����`����������ڌ����w�����w�����M���о��r���@�N�`�������S����ǻ�����Ҍ����w�������w�����]�c�����߰���S���������ö��a(ch��n)�����`���g�л��a����ѣ��@�ڵ��m(x��)�¹�(ji��)��ԇ�Y���п��Կ����@�c��
һҺ����SHQ40���w���w��ģ
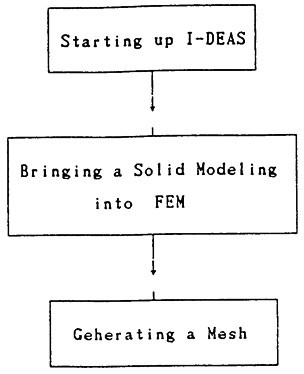
��SUN����վ��ʹ��I��DEASܛ����Solid��Modelingģ�K��SHQ40���w�M�Ќ��w��ģ������Ҫ����Ҏ(gu��)����D3-4��ʾ�ɻ���
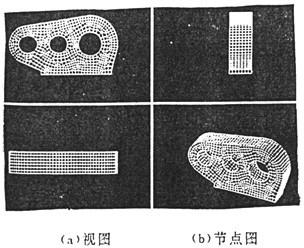
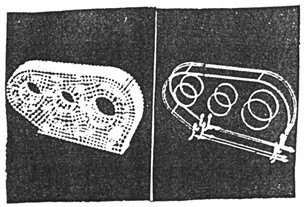
������ģ����D3-5���D3-6��ʾ��ç�����ЈD3-5��SHQ40�����h(hu��n)�p�������w����ҕ�D����ҕ�D���D3-6����һƽ���и����w���õ�ҕ�D�ﵻ�������^�����w��(n��i)���Y����ŭ��
����SHQ40���w����Ԫ�־W(w��ng)
��SUN����վ��ʹ��I��DEASܛ���е�����Ԫģ�K��FE��Modeling��and��Analysis����SHQ40���w�M������Ԫ�־W(w��ng)��빣�����w����Ҏ(gu��)����D3-7ʾ���档
�D3-4 SM�������̈D
�D3-5 SHQ40���wҕ�D
�D3-6 SHQ40���w��ҕ�D
�D3-7 ����Ԫ�־W(w��ng)�������̈D
����SMģ�K�н�����SHQ40���w���wģ�ͣ���D3-5���{(di��o)������Ԫģ�K�����M�з־W(w��ng)ǰ���x�����
���(sh��)������
1.��Ԫ����
�ڵ��Ĺ�(ji��)�о屲���҂���ӑՓ�^����SHQ40���w�Ć�Ԫ�҂��x�þ��Ծ��α���Ԫ�팦���w�M���xɢ��̎���������D3-2��ʾ���䡣
2.��Ԫ����(sh��)
a.��Ԫ��ȣ�8mm�����w�ں�
b.��Ԫ�L�ȣ�20.0mm
�x���Ԫ���L���ߴ磬��ҪҪ���]�����Ă����أ�
��һ ��ƽ��Ԫ��������Ԫ���a(ch��n)���`��Ĵ���������У�
�ڶ� �о���������
���� �Ԅӷ־W(w��ng)�ܷ�ɹ���
���� Ӌ������Ҫ��
�C�Ͽ��]��������Σ�飬�҂��x���Ԫ���L���ߴ��20.0mm���ۣ��@�ӣ�
��һ ��ƽ��Ԫ��������Ԫ���a(ch��n)�����`����飺
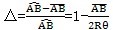
��D3-8ʾ���`��ֵ����飺
��3.24��
��HQ40���w���٣�������С�돽������R=115mm����

=20.0mm��ף���t

��rad��
�D3-8
��Ҋ���ˣ���ƽ��Ԫ�������暤Ԫ���`���10-4��������������䡣
�ڶ����ã��о���������
���������о����r�����IJ��L�˱�횴�������Ԫ�ijߴ�¶��������
��>>

��3.25��
��SHQ40���w���ǣ����Ϟ��T�FHT20-40��Ҋ�����£��������ٞ�=C=5.85 10Bmm/s���£������� Ҋ���l�ʷ�����d=16��20KHz,�t��
�����@���l��Ҳ�M��
���� �Ԅӷ־W(w��ng)
�҂��x���ˆ�Ԫ�ߴ缉50mm����40mm��35mm�ͽϡ�28mm��ֹ��25.4mm��22mm�M�з־W(w��ng)����δ�@�ɹ����ϣ����x��20.0mm�r�������־W(w��ng)�ɹ�����Ҋ�˳ߴ������ߴ�Ĺ��������С�������t������Ӌ�����̓�(n��i)�棬�����x��20.0mm�DZ��^ǡ��?sh��)ġ?/DIV>
����Ԫ�����Գߴ��x����ש�ڣ��҂�����ʹ��FEMģ�K���Ԅӷ־W(w��ng)���܌�SHQ40���w���wģ���M�з־W(w��ng)�˳�¬���־W(w��ng)�������Ԫģ����D3-9��a������b��ʾ��ϣ��
�D3-9 ����Ԫ�־W(w��ng)����(ji��)�c�D
�D3-10 �s���D
SHQ40���w����Ԫģ��Ӌ��3507���Ծ��α���Ԫ������3499����(ji��)�c��24���W(w��ng)�������١�ͨ�^������Ԫ��׃�Ιz��֪���̣�����׃�H��4%���ң��҂��O���Ğ�10%������Ҋ���@�N�ߴ������Ԫ�،�SHQ40�����h(hu��n)�p�������w�M�з־W(w��ng)�Ƿdz��ɹ��������
��3-7 SHQ40���h(hu��n)�p�������w����ԪӋ��
�҂��þ��Ծ��Ա���Ԫ��SHQ40���w�xɢ�����ɣ���D3-9��ʾ���ǣ��ͿɌ����M�й���ģ�B(t��i)����(sh��)Ӌ���ˣ���߱�����������D3-11��С�
�D3-11
���M��Ӌ��ǰ�҂�߀����������¹�����
һ�Ͽǡ�������Ԫģ���ϼ�߅��s���l��
��D3-3���D3-10ʾ
������������
1�Ӻ䡢��ȣ�8mm
2������A���Ԅ��ȣ��o�F��
3���������ȣ��o�F��
����������������
1�潧������ģ����126GPa
2����У�ȣ�0.3
3ѱ��ܶȣ�7.0��/����3
4��ѯ������ģ����44.3GPa
5���S����������314MPa
6dz�ޡ��S�É�������736 MPa
��Ť������ⷶ��
���ǰʮ���A����ģ�B(t��i)�Ĺ���ģ�B(t��i)����(sh��)��
����ߡ���ⷽ��
������Ԫģ�K�и�������ģ�B(t��i)�M�з����ЃɷN������һ�N��٤����ȥ����Guyan Reduct-ion����������Ҫ�x�������ɶ����ѣ��@�N���������ɶȔ�(sh��)�m�������^�õ��x���������ɶȵ�ģ�����ஔ��(j��ng)���ģ���һ�Nͬ��ʸ���B����Simultaneous Vector Interation�������ޣ��������������ɶ�ģ�ͱ�٤����ȥ��������Чɾ�ۣ���錦�ڴ����ɶȵ�ģ��٤��ȥ���������ɶ��Ǻ��y�x��ģ����ʸɧ���҂��x��SN1����SHQ40���w������Ԫģ���M��Ӌ�㡣
SV1�㷨�������£�
�O[��]���㡣��һ������ط������б�ʾ�����ļ��Oģ�B(t��i)�������Д�(sh��)������δ�s�������ɶȔ�(sh��)��㣻
[K]��з��[M]�������Ⱦ�ꇵ��|(zh��)����ꇣ�
SV1�㷨��һ�ε��������ɲ���
1ͤ�ᡢ[��]=[K]-1[M][��]old
2�۵����ӿ��g������[��]new=[��][Q]
��[��]t[K][��][Q]= [��]t[M][��][Q][W]
����[W]�錦��ꇣ�[Q]������[W]������ʸ��������ֵ������
�S���������裬[Q]��[W]�Ք�������Ԫģ�͵�ģ�B(t��i)���l�ʡ�
����ʸ�����x������ɳ����Ԅ��x�����ɣ��������Δ�(sh��)���Á����x������@���Δ�(sh��)�r�����Ԅ�ֹͣ����Ӫ�ڡ�
������������x�Ӻ��҂��ͿɌ�SHQ40���w����Ԫģ���M��Ӌ����̨�ȣ���ǰʮ���Aģ�B(t��i)��D3-2��a����b����c����d����e����f����g����h����i����k����l��ʾ���������l��ֵ���3-1ʾ��
��3-1 �����l��ֵ
|
ģ�B(t��i) |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
�l�� |
215.0 |
322.9 |
409.2 |
501.0 |
537.5 |
577.7 |
670.4 |
673.1 |
683.1 |
754.6 |
765.7 |
851.7 |
�D3-12���D�ԣ�

 +C
+C +��K+jD��x=
+��K+jD��x= ��3.2��
��3.2��