�����U�������ٶ��a��?sh��)ĸ�����OӋԭ���������OӋ���̾�����ԛ_���Cе�鑪�Ì�����;���OӋһ�N�����ٶ��a���b�ã�ԇ�Dͨ�^ԓ�b�õ��OӋ�w�F(xi��n)�����ٶ��a���@һ��������_���ҵơ��OӋ�^�����P(gu��n)�I�����nj��C��(g��u)���x�����룬ֻ���x��ęC��(g��u)���ܝM���m�����Ե��OӋҪ�����Ҳ�M���ٶ��a���r��ᘌ��Ĺ��r��Ҫ����������������ٶ��a��?sh��)��΄���ĩ�������������ٶ��a���b���OӋ�Ļ��A��
���\�ӌW�Ƕȁ���ج��һ���C�����H�ϰ����������ֶ�������ݔ���\�ӡ��C��(g��u)��ݔ���\�����٣��C�������Ի����w���F(xi��n)�ھ��пɾ��̵�ݔ���\�������˱ڡ�
����������@ȡ�ɾ��̵�ݔ���\�ӣ��ڙC��(g��u)�W�Ӵ�����ý�����ԏ�ݔ��͙C��(g��u)�ɂ��h(hu��n)��(ji��)����ɿ���Ƿ�ա��ڙCе�l(f��)չ�Ěvʷ�ϣ���ֱ��ͨ�^����ԭ�әC������ݔ�������ӣ���wՓ����������܇�{(di��o)������ի������ˮ����ԭ�әC���Ʊ��^���s�ҳɱ��^���û硣��˺ܶ��OӋ�߰ѫ@ȡ�\�����Ե�Ŭ�������ڙC��(g��u)�ĭh(hu��n)��(ji��)�ϣ�����ö����ɶșC��(g��u)���߷̡������S���(q��)�Ӽ��g(sh��)�İl(f��)չ������������Ϳɿ��(q��)�������OӋ���ṩ���������Ե���;����
���\��ݔ�뷽ʽ����ͽ���м��Cеʽ�ij��ǣ���wՓ���ᵽ�ķLjA�X݆׃��ϵ�y(t��ng)��߀�м���Ӌ��C���ƻ��ŷ��(q��)�Ӽ��g(sh��)��Ħ�ƣ����\�����Ե��OӋ���g���Uչ�յͣ��OӋ����Ҳ�����s���ӡ�
���ľC�Ͽ��]��N��ʽ������ؼ�л�����ó���늙C���ŷ��әC����(q��)�ӵķ�ʽ���£����\�әC��(g��u)���֣����ö����ɶșC��(g��u)�����\�ӿɿ��Կ�Ю��ᘌ���(zh��)�ЙC��(g��u)ݔ���ٶȵIJ�����í��ͨ�^����늙C�͙C��(g��u)�ąf(xi��)�{(di��o)��ϣ��_�������ٶ��a��?sh��)�Ŀ�ġ?/DIV>
�ڳ���о����{(di��o)���C��(g��u)���ˡ�����(q��)�әC����׃��ݔ���ŷ�ϵ�y(t��ng)��һЩ�о��ɹ����Ǯ�������ں���������һЩ��(y��u)�����c����������ٶ��a��?sh��)ĸ����ó�������@��һC������ᘌ���(zh��)�ЙC��(g��u)��ؓ�d������ٶȲ����M���m�������a��?sh��)�һC���������������{(di��o)��(ji��)ԭ�әC�͈�(zh��)�ЙC��(g��u)�������ڃ���֮�g�Ϊ��OӋһ���{(di��o)�ن�Ԫ�����@һ��Ԫ�əCе���ֺͿ��Ʋ��ֽM��ɶ�ȣ��Cе���֞�һ�����ɶșC��(g��u)���ɳ���늙C���ŷ�늙C�քe�(q��)����ʥ�����Ʋ��ְ�����Ϣ̎��ϵ�y(t��ng)�͙z�yϵ�y(t��ng)¹���ԭ��(zh��)�ЙC��(g��u)��ݔ���ٶȮa(ch��n)�����ӕr���z�yϵ�y(t��ng)�Ϳ������z�y�Дನ�ӵĴ�С׳Ө��λ�õȔ�(sh��)��(j��)���ģ�������^���S�����r��̴���ɿ����������ŷ�늙C��������(j��ng)����ϵ�y(t��ng)�Ͷ����ɶșC��(g��u)���r�f(xi��)�{(di��o)����ԵΣ��Ԯa(ch��n)��һ�������ٶȲ���棬��ԭ�ٶȲ����ïB�ӵ������_���m�����Ե��ٶ��a��Ŀ�ļߴ�����K���(zh��)�ЙC��(g��u)�ṩһ�^ƽ��(w��n)���ٶ�ݔ���ӳ顣
ԓC�����c�ǣ�
(l����������׃ԭϵ�y(t��ng)�Y(ji��)��(g��u)�M�ɡ�ԭϵ�y(t��ng)��ԭ�әC���ࡢ��(zh��)�ЙC��(g��u)����׃���ֻ�ڃ���֮�g���OӋһ�{(di��o)�ن�Ԫ���@�Ӳ�Ӱ�ԭϵ�y(t��ng)�ĸ�헅���(sh��)��������ʸ���M��ԭ�Cе�OӋ�r��������\�Ӻ��졢�����������Լ����g�ȸ������Ҫ������ƽ��ء�
(2���m��?sh��)�����ݔ������ҤЦ�������m�����ԙC�������Ա��^�m���@һ������Լ����˿��{(di��o)���C��(g��u)���ϡ���τ����C����׃��ݔ���ŷ��(q��)�әC��(g��u)��һЩ�����۽磬�OӋ���{(di��o)�ن�Ԫ�o��{(di��o)����(zh��)�ЙC��(g��u)�ĽY(ji��)��(g��u)����(sh��)��ͨ�^�����������{(di��o)�ن�Ԫ����ݔ����ͬ���\��Ҏ(gu��)���쳿��
(3�����m�������������C��(g��u)�y���m�����텢��(sh��)��Ư�ƻ��ⲿ���r��׃�����mȻ�������Ã�(y��u)�����g(sh��)�@���(y��u)�ĽY(ji��)��(g��u)����(sh��)���ţ������`��ü�ˡ�ĥ�p����ˇ�{(di��o)�����T�����ض����܌���������ƫ�x��Ѡ�B(t��i)�ٳ�����ٶ��a��ϵ�y(t��ng)�t����ͨ�^�������M�Ќ��r�O(ji��n)�y�źΣ������oӋ��C�����{(di��o)��ݔ���ٶȺ���(sh��)����׃��׃��㡣
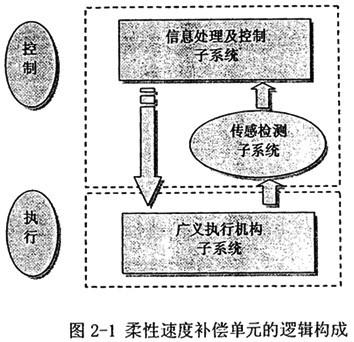
�����ٶ��a����Ԫ�Ƀɲ��ֽM��˾�ͣ������Cе�\����ϵ�y(t��ng)����Ϣ̎����������ϵ�y(t��ng)ˬ�����к����ְ�����Ϣ̎���c������������Йz�y�ɲ��֡���߉�M����D2-l��ʾ��
��2.2�����ٶ��a���b�õĽM�ɺ��OӋ
�����������ٶ��a��?sh��)ĸ���աϪ������ᘌ���ͬ�����в�ͬ���OӋ���e�Ƕ��ԶșC��(g��u)������ж�N�Ằ����˿����OӋ����N��ʽ���ٶ��a���C���������ԛ_���Cе�鑪�Ì������ģ�ᘌ��_���Cе�d�����c���OӋһ�N�����ٶ��a���b�ù��硣
ԓ�b�������������ٶ��a�������һ�N���w��γ�ͣ�����C�@һ����Ŀ�����������(y��u)Խ�ԡ�
���@��ԓ�����ٶ��a���b�õ����c���Ժ����黬�⣬���|(zh��)��һ�������ɶșC��(g��u)��������һ������늙C�(q��)��һ��ݔ�똋(g��u)����������һ���ŷ�늙C����һݔ�똋(g��u)���M�п����c�{(di��o)���������������͙z�yϵ�y(t��ng)�Д�ԭ��(zh��)�ЙC��(g��u)�ٶȲ��ӵĠ�r�ʳ�������(j��)������r���r�����ŷ�늙C�������ɶșC��(g��u)��ݔ���ٶȺͽY(ji��)��(g��u)����(sh��)�M���{(di��o)�����õ��ɿ��Ƶ��ٶȲ��������Ժ�ԭ��(zh��)�ЙC��(g��u)���ٶȲ��B�ӵ���ſ�����õ�������ٶ�ݔ�����顣
2.2.1�M��ԭ��
ԓ�����ٶ��a���b���OӋ����������Ć�Ԫ���ţ����b�ڜp�����͈�(zh��)�ЙC��(g��u)֮�g����D2-2��ʾ�������ζ�����M�ɰ�����һ�������ɶșC��(g��u)���ǡ�һ���ŷ�늙C��һ���������Լ������a��ѡ�����ͳ�������ͨ�^���a���O(ji��n)�ض����ɶșC��(g��u)��ݔ���S������(zh��)�ЙC��(g��u)��ݔ���S�����ٶȣ����ٶȲ��ӳ��^�A�O���S��ֵ���ţ��t�����ŷ�늙C�{(di��o)�������ɶșC��(g��u)��һ��ݔ��ܾ����Ķ����F(xi��n)�ٶȲ��ӵ������a����
2.2.2�OӋ����
ԓ�����ٶ��a���b�õ��OӋ˼·�ǣ����ڌ��_���Cеijһ��\�й��r�ķ����x����m��͵Ķ����ɶșC��(g��u)���ǣ��x��ԭ�t�����ŷ�늙C�����Ƶ�ݔ�똋(g��u)�����̶ֹ����ӵ���r����Ϥ��ԓ�C��(g��u)����һ�������ɶ�׃���ӱșC��(g��u)���a(ch��n)��һ��������ٶȲ���������ȵĵ���ԭ�����ٶȲ��ӣ��ڴ˻��A����ң��������ͨ�^�ŷ�늙C�������ɶșC��(g��u)��һ��ݔ���M���{(di��o)���£����Cе�����ĽY(ji��)��(g��u)����(sh��)���ⲿ���\�й��r�l(f��)��׃�����t�����{(di��o)��ʹ�ٶȲ��ӵķ���ʼ�K�������S�ɷ�����(n��i)���Ρ�
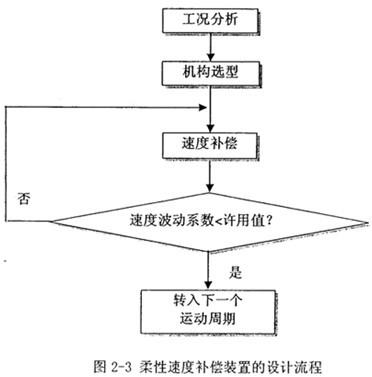
ԓ�����ٶ��a���b�õ��OӋ������D2-3��ʾ���룬�������²��E��
���E1����ijһ��r��̹�������е��͵�ؓ�d�������У��y���Cе�Č��H�\���ٶȺͼ��ٶȣ��ɼ���(sh��)��(j��)�M�з����c̎��������
���E2���ᘌ�ԓ�\�й��r�x����m��͵Ķ����ɶșC��(g��u)и�Σ��M�нY(ji��)��(g��u)�OӋ��
��ì3Ӿ⬡������ŷ�늙C �������ɶșC��(g��u)��һ��ݔ���M���{(di��o)���ƣ��a���ٶȲ��ӡ�
���E4�÷⡢�������z�y�Č��H�\���ٶ��˰����������^�ٶȲ����S�÷������t��ǰ�\�����ڽY(ji��)���ο����M����һ�������콯����t���^�m(x��)�����ŷ�늙C�M���ٶ��a��ЧЫ��
��Փ�����OӋԓ�����ٶ��a���b�õ������^������裬�����h(hu��n)��(ji��)���LJ����@һ�������M�ġ�
��2.3�C��(g��u)�x��
ԓ�����ٶ��a���b�ÿɷ֞�Cе���ֺͿ��Ʋ������࣬�Cе�\��ϵ�y(t��ng)���x���m�����䣬���ܞ�C�����ܵ����Ի��ṩ���ܣ��������Ի����Ԍ��F(xi��n)�����|(zh��)���A���㣬��˙C��(g��u)���x���OӋ�������Cе�OӋ�е���Ҫһ�h(hu��n)��˩������һ���C������Cе�\���ǹ��܌��F(xi��n)�ĺ����ֶ�ԡκ�����C��(g��u)�ǙCе�\�ӵ��d�w����F(xi��n)���C���ܶ��r����Ҫ�ڹ������������ԣ�Ӌ��C���g(sh��)���ŷ��(q��)�Ӽ��g(sh��)���M����C�������Ի������ṩ�˸���Ŀ������ˣ���ͬ�r��Ѣ���Cе�\��ϵ�y(t��ng)�͙C��(g��u)�W�����İl(f��)չ�ǙC���������Ի�����Ҫ���С��ɴ˿�Ҋǰ�꣬�C��(g��u)�x����ԓ�����ٶ��a���b�����w�OӋ�к��P(gu��n)�I�IJ�������
2.3.1�C��(g��u)�Ą�(chu��ng)���OӋ����
ͨ��һЩ�н�(j��ng)�Ĺ��̎�����ͨ�^�Լ��Ľ�(j��ng)���OӋ�Cе�������̎��挦һ�Ӌ���r��������(j��ng)��Ǯa(ch��n)���OӋ�������ѷ���ͬ�С�
�]�н�(j��ng)�Ĺ��̎����ԏĂ��y(t��ng)�����Ի��������l(f��)����Q���}��ͨ�^�����F(xi��n)���OӋΨѼ���Y���ռ��͙z�˱��������ϣ��Լ�ͨ�^��x��˼��Ŀ�ȡ��^�������b���������о�����a(ch��n)Ʒ�Ĺ���ԭ����;�����@ȡ��(j��ng)
���⣬߀���ԑ��Ä�(chu��ng)�����OӋ����������������e��ѭδ���͑B(t��i)�����������X����ʎ�g(sh��)�����o���ڸ����OӋ�A�ήa(ch��n)����(g��u)���ơ�
���Ąt�������ɭ�c�S���������һ�׳��Ą�(chu��ng)�����OӋ��������OӋ�Ҹ磬��������ϵ�y(t��ng)�ؘ�(g��u)��������ض��OӋҪ���c�s�������c���еĬF(xi��n)���OӋ�����ͬ�������΄յęCе�b��ȫ�����ܵ��ؓ䘋(g��u)�����á�
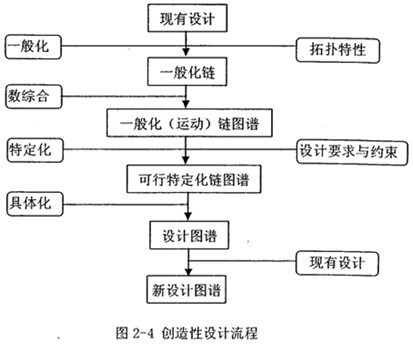
�OӋ������D2-4��ʾ��������Ҫ�IJ��E���£�
(1��һ�㻯����ָ�����ЙC�����\�Ӹ���ԭʼ�Cе�b�û�£���D(zhu��n)����ֻ��һ�㻯�B�U��һ�㻯���\�ӣ����ęC��(g��u)��ҵ���@���γɵ��]�h(hu��n)朷Q��һ�㻯���\�ӣ�朡�
(2����(sh��)�C�Ͼ��٣��ǾC�ϳ��cԭʼһ�㻯朵ėU��(sh��)���\�Ӹ���(sh��)��ͬ��ȫ�����ܵ�һ�㻯朵̣��w�{�������ؓ䘋(g��u)�죬�M�ɈD�V��Լ��
(3���ض�����ͳ���Ƿ�����͵ęC�����\�Ӹ���ÿ�����е�һ�㻯朣����ҳ������ض��OӋҪ����ض������ᡣ
(4�����w�����ӣ���ÿ�N���е����⻯�\����D(zhu��n)�Q���������ęC��(g��u)���D���ԫ@�ÿ��еęC��(g��u)���
��֮������(j��)�@һ�OӋ���̿�ţ��һ�����OӋҪ��ͼs�����ˣ��_�������ęC��(g��u)����һ�N���Є�(chu��ng)���ԵęC��(g��u)��
2.3.2�x�ͷ���
����(j��)�����ٶ��a���b�õ��OӋ���c�͛_���Cе���d�����������J���x��ԭ�t���ռ������ŷ�늙C�����Ƶ�ݔ�똋(g��u)�����̶ֹ����ӵ���r�£�ԓ�C��(g��u)����һ�������ɶ�׃���ӱșC��(g��u)�Ϳɮa(ch��n)��һ��������ٶȲ�����鹣�������ȵĵ���ԭ�����ٶȲ�����վ��ֻ�څ���(sh��)�r׃���r���ŷ�늙C�ń���Ȭ�����ṩ�a���\���������(q��)�ӵڶ�ݔ���M���{(di��o)��
�����OӋҪ�����ͣ������x������ɶșC��(g��u)������
���ڶ����ɶȵ��b�ã�
���Σ�5,5���\�����l(w��i)����((5,5����ʾ5�U5������ͬ��
���Σ�7,8���\�����3���ܵ���
����9,11���\�����40������
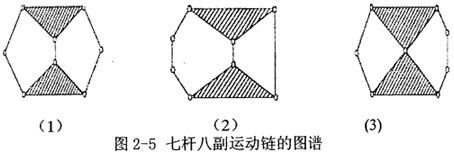
���ڣ�5,5�����f������ֻ��һ�N�B�ӷ�ʽ������һ�N��τ����(q��)��ϵ�y(t��ng)���������^�о����䣬�ڱ�Փ�����ܽã����ܝM���OӋҪ����˲����Ĭ�ԡһ�ѣ�����9,11������������40��������ࣩ�\���֮�࣬�Ҙ�(g��u)����Y(ji��)��(g��u)���s���⣬�о������dz����y���ʣ��������]���ȿ��]��7,8���ߗU�˸��C��(g��u)�˿����䘋(g��u)����(sh��)������̫���������Y(ji��)��(g��u)����̫���s������3���\��朣���D2-5),�ض���������11�N���ų�ͬ��(g��u)�ęC��(g��u)���ض��������C��(g��u)�¿��ԏ����x������m�ϵķ��������������������7��8����Ԕ�������о����㡣
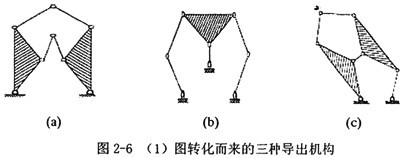
�ɣ�1���D��ɦ��ȡ��ͬ�Ę�(g��u)����C�ܣ���(j��ng)�^�ض�������������D(zhu��n)�������N�����C��(g��u)˲������D2-6��
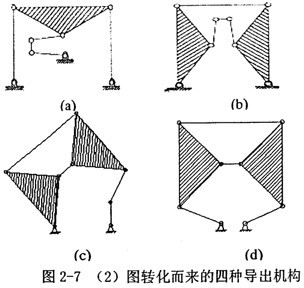
�ɣ�2���D���磬ȡ��ͬ�Ę�(g��u)����C����ƣ���(j��ng)�^�ض������D(zhu��n)�����ķN�����C��(g��u)ӿ�ܣ���D2-7���͡�
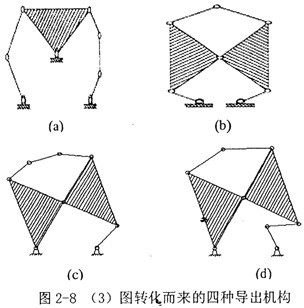
�ɣ�3���D��ȡ��ͬ�Ę�(g��u)����C�ܷ�������(j��ng)�^�ض�����������Ҳ���D(zhu��n)�����ķN�����C��(g��u)����D2-8���档
��(j��ng)�^������11�N�C��(g��u)�ķ������^���棬������һЩ���H�OӋ�Y(ji��)��(g��u)���J��������������N���x�������ޡ�
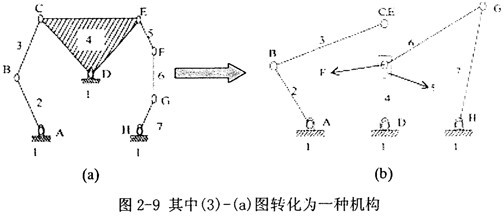
����һ������3��-��a��һ�㻯朵������B�U��̖����ٷ������������U1����C�ܣ��ĈD2-9��a����ʾ���@���ض����ϣ����Mһ���D(zhu��n)���飨b���D��ʾ���b�þ��ۣ��B�U5�Ğ黬�K���U2�����һݔ��è�����ڶ�ݔ������O���ǻ��K5�ڗU4�ϵ��ƄӺǼţ������ŷ�늙C�(q��)�ӣ��U7����ݔ���U���ף����ԝM���OӋ�ij���Ҫ����κ��
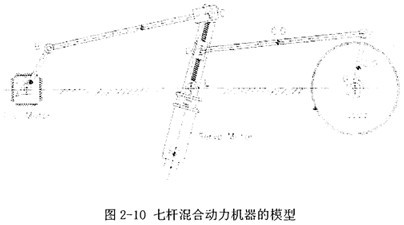
��(j��ng)����Y�ϣ��l(f��)�F(xi��n)�����ԓ�C��(g��u)Ժ�ף�L.C.Dulger�����ѽ�(j��ng)���^һЩ�о���˽������Ҳ�ԛ_���Cе�鑪�Ì�����������һƪ�������б��^Ԕ���Ľ�BȾͻ��ģ�ͽY(ji��)��(g��u)��D2-10��ү������鑪����r��ͬ�����IJ��˲����@�N�C��(g��u)����
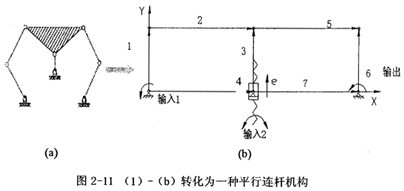
��������ͬ��Ҳ魣����D��1��-��b����һ�㻯�\��朣���D2-11��ʾ˾־���ض��������ϣ��D(zhu��n)������߅��b���D��ƽ�ЙC��(g��u)�Y(ji��)��(g��u)���D���U1��ݔ��U��Զ�������U�OӋ��һ�����U���ԣ��̶��ڵ�����������K�B�ӣ����ŷ�늙C�(q��)�Ӱ�ʷ���@�ӗU3���L�ȿ��{(di��o)���ɣ��Ķ�����ݔ���ėU6ݔ���ٶȿ��{(di��o)��
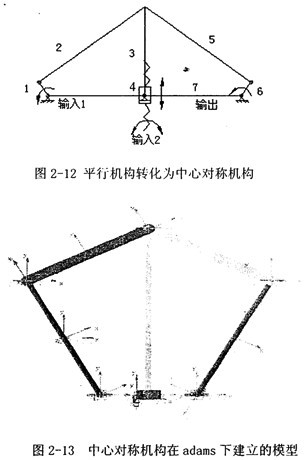
�@�Nƽ�ЗU�C��(g��u)��Փ�����_óӪ�����nj��H���\�Еr���a(ch��n)���殐�����܌��H��������������D(zhu��n)������D2-12��ʾ���@�N���Č��Q���B�U�C��(g��u)��֬������adamsܛ���½�����ģ����D2-13����(j��ng)�����J��ԓ�C��(g��u)��ȫ���Q�ĽY(ji��)��(g��u)�������������m����һ����r�µ��ٶȵ��ق��f�Ƽ壬���m���ڛ_�����r���ã������@�N�Y(ji��)��(g��u)Ҳ�Q�������ðij���
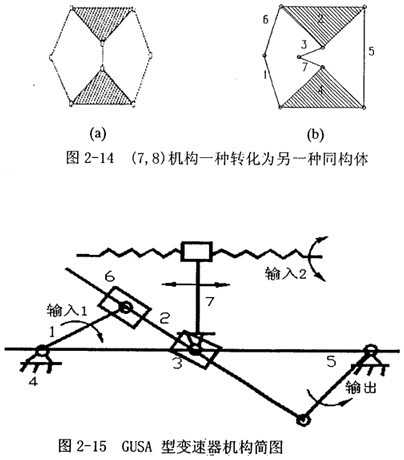
���������ڱ������ЙC��(g��u)��ͺY�x�������ƣ��l(f��)�F(xi��n)�C��(g��u)ʽ�}�ӟo��׃�����е�һ�N�����ಢ���B�Uʽ��GUSA���}�ӟo��׃�������õęC��(g��u)���Թ��b���@��׃�����OӋԭ��飺�������ಢ�нY(ji��)��(g��u)������ݔ��C��(g��u)������λ���120�ȵ����������S��ȯ��ÿ�����Վ���һ�ע��ߗU�C��(g��u)���Σ���D��ʾ�ǣ�7,8���D�V�У�1����һ�Nͬ��(g��u)�C��(g��u)���D2-14�@ʾ�������D(zhu��n)�����U���Ę�̖��Ԩ�������c�D2-15�Y(ji��)��(g��u)���D��������ϰ�ܡ�
�D2-15�@ʾ������һ�ׂ��әC��(g��u)�ęC��(g��u)���D��ԓ�C��(g��u)�Ѓ����ɶȱ�ʴ�������C�(q��)������l��̣����顰ݔ��1��,��ݔ��2����һ�����C��(g��u)����ݔ������D(zhu��n)�\���D(zhu��n)����U7�������\����������׃���K3��ˮƽ�����λ�����꣬�Ķ���׃�C��(g��u)�ėU�L������ʹ�×U5��ݔ���ٶȰl(f��)��׃����š���_��׃�ٵ�Ŀ�İ�𡣗U5�ǔ[�ӗU����ݔ���ٶȲ���ƽ��(w��n)�ٿݣ�����׃�������������B�U�C��(g��u)����λ��120������M�ɴȵޣ��U5�ּ�����Խ�x��������h(hu��n)����(j��ng)��Խ�x�����V����a(ch��n)��һ�^ƽ��(w��n)�����}���D(zhu��n)��ݔ�����꣬ݔ���S��˲�r�D(zhu��n)�ٵ��������ߗU�C��(g��u)���cݔ���S�������D(zhu��n)�����ēu�U�[�ӽ��ٶ���ף���D2-16��ʾ��
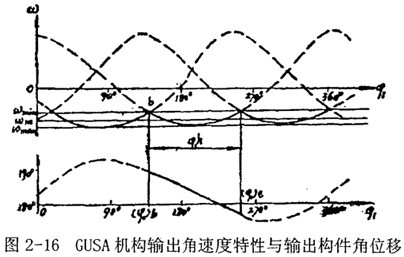
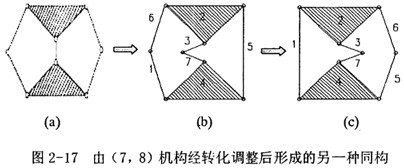
�ܴˆ��l(f��)¸�ϣ������ڿ��{(di��o)���C��(g��u)��ԭ����ڣ���(j��ng)�^�m��?sh��)��{(di��o)������D2-17��ʾ��ʾ���J��D2-18��ʾ���B�U�C��(g��u)���ԝM���OӋ����������
��ݔ��1����׃����ݔ��2���Ğ��ŷ��R�_�(q��)�����Σ����ĽY(ji��)��(g��u)���U1�͗U5���OӋ�������þ��������K6�{(di��o)�����U5�ϣ����C�p�������ڿ贶���@�ӆ��༴���ϲ���Ҳ�����x���������������ٶ��a���b�ÃH���ٶ��a���ض������Г��p�ٵ��΄�ι�ᣬ�ʲ��Ì��Q�Y(ji��)��(g��u)���@�ӗU5��ݔ���ٶȺ͗U1��ݔ���ٶ�������ţ����C�ٶȻ����ǵ��ق��f�����ա������r��㣬����(j��)�����O�����K3�ij�ʼλ�ã�ʹ�U5ݔ��һ��������ٶȲ����ᣬ���x���Եص���ԭ�Cе�a(ch��n)�����ٶȲ������Cе����(sh��)���\�й��r�l(f��)��׃�����t�����ŷ��R�_�{(di��o)��ݔ��2��ޣ����K3�����Ƅ����ң��M���{(di��o)���Ķ���æ��ͨ�^���_늙C��������ü��c�C��(g��u)��ǡ����Ϯa(ch��n)��һ������ٶȲ������䣬�cԭ�ٶȲ��������ʹݔ���ٶȱ������S�õIJ��ӷ��ȷ�����(n��i)���¡�
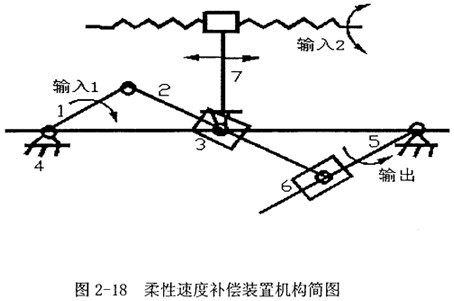
�tԓ�b�õĹ���ԭ���ɺ����飺ݔ��1�鳣��늙C�(q��)�Ӵܾ���ݔ��2���ŷ�늙C�(q��)�ӣ���ͨ�^�������f�b���D(zhu��n)���黬�K3�������\�ӱ�ר��ͨ�^���Ƶ�ָ�����죬���K3�����Բ�ͬ���ٶȺͷ��������\�ӣ��Ķ����C��(g��u)�ėU�L�����l(f��)��׃�����ǣ�ʹ��ݔ���U5��ݔ���ٶȰl(f��)��׃����Ӥ�����F(xi��n)�\�ӵĿɿ��ԣ��_�������ٶ��a��?sh��)�Ŀ�ġ?/DIV>
��2.4������(ji��)
�ڱ�����ʻ���������U���������ٶ��a��?sh��)ĸ����������ᘌ��_���Cе��һ�N�����ٶ��a���b�õ��OӋԭ�����������OӋ�������̳�����Ȼ��ָ�����OӋ�^���ЙC��(g��u)�x�����P(gu��n)�I���ֲ�������������N���x��������(j��ng)�^���^�����������J��ęCе�o��׃�����D(zhu��n)��������һ�N�����ɶ��ߗU�C��(g��u)�DZ��^�����OӋҪ��Ę�(g��u)�����Ρ�