運(yùn)動(dòng)學(xué)分析
本章中信夫,從運(yùn)動(dòng)學(xué)角度入手分析柔性速度補(bǔ)償裝置的速度輸出特性倾皿,對(duì)兩自由度連桿機(jī)構(gòu)用解析法作運(yùn)動(dòng)學(xué)分析,再借助Matlab軟件來編程計(jì)算咪干。運(yùn)動(dòng)學(xué)分析的結(jié)果將為下面的動(dòng)力學(xué)分析提供理論依據(jù)。
§3.1引言
機(jī)械系統(tǒng)可以視為是由多個(gè)相互連接辐赞、彼此能夠相互運(yùn)動(dòng)的構(gòu)件的組合部翘。
在機(jī)械系統(tǒng)設(shè)計(jì)中有3種性質(zhì)不同的分析:
(l)機(jī)械系統(tǒng)的運(yùn)動(dòng)學(xué)分析
(2)機(jī)械系統(tǒng)的靜力學(xué)分析
(3)機(jī)械系統(tǒng)的動(dòng)力學(xué)分析
在本章中,暫不考慮系統(tǒng)的靜力學(xué)分析响委,先從運(yùn)動(dòng)學(xué)分析入手新思,對(duì)柔性速度補(bǔ)償裝置進(jìn)行分析研究。主要涉及系統(tǒng)及其各構(gòu)件的運(yùn)動(dòng)分析赘风,而與引起運(yùn)動(dòng)的力無關(guān)夹囚。運(yùn)動(dòng)學(xué)分析中,系統(tǒng)中一個(gè)或多個(gè)構(gòu)件的位置或相對(duì)位置與時(shí)間的關(guān)系是規(guī)定好的邀窃,其余構(gòu)件的位置荸哟、速度和加速度與時(shí)間的關(guān)系,可以通過求解位置的非線性方程組和速度瞬捕、加速度的非線性方程組來確定鞍历。
本章所要做的工作就是對(duì)上一章選出來的二自由度連桿機(jī)構(gòu),進(jìn)行運(yùn)動(dòng)學(xué)分析肪虎,初步選定機(jī)構(gòu)的結(jié)構(gòu)參數(shù)劣砍,分析其輸入輸出速度能否滿足設(shè)計(jì)要求,為以后的動(dòng)力學(xué)分析做依據(jù)羽嘉。
§3.2Mat1ab軟件
本章里引舱,運(yùn)動(dòng)學(xué)分析中,有多組比較復(fù)雜的非線性方程要解反腺,這些都是通過Matlab來實(shí)現(xiàn)的猬蕉。
Mat1ab目前是大家比較常用的功能強(qiáng)大的數(shù)學(xué)計(jì)算軟件,具有良好的開放性和運(yùn)行的可靠性聊浊,在數(shù)值計(jì)算方面比較有優(yōu)勢(shì)薄好。
本章所用的Matlab,是較新的6.5版本斩缘,是一種功能強(qiáng)唁底、效率高、便于進(jìn)行科學(xué)和工程計(jì)算的交互式軟件包泳隶。其中包括:一般數(shù)值分析他幢、矩陣運(yùn)算涮侥、數(shù)字信號(hào)處理、建模订咆、系統(tǒng)控制和優(yōu)化等應(yīng)用程序铐维,并二集應(yīng)用程序和圖形于同一環(huán)境,便于使用慎菲。在此環(huán)境下嫁蛇,所解問題的Matlab語言表述形式和其數(shù)學(xué)形式相同,不需要按傳統(tǒng)的方法編程露该。
對(duì)多數(shù)科學(xué)工作者而言睬棚,使用Matlab的庫函數(shù)的可以節(jié)省很多重復(fù)編程,節(jié)省了大量的人力解幼、物力和時(shí)間抑党,加快了工作進(jìn)程和效率。本章要借助Matlab軟件編程來解方程书幕。
§3.3運(yùn)動(dòng)學(xué)分析
平面機(jī)構(gòu)運(yùn)動(dòng)分析的解析法也有多種新荤,采用矢量方程解析法揽趾,比較便于應(yīng)用和編程計(jì)算台汇。
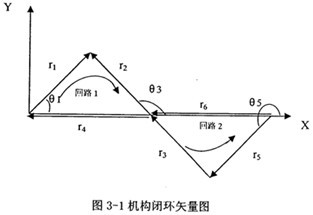
將圖2-18所示的機(jī)構(gòu)簡(jiǎn)圖,按比例繪成運(yùn)動(dòng)簡(jiǎn)圖篱瞎,建立直角坐標(biāo)系苟呐,按照矢量方程解析法,在圖中標(biāo)注各桿矢及其各桿矢的方位角遥局。
對(duì)兩自由度連桿機(jī)構(gòu)付箩,螺旋傳動(dòng)部分運(yùn)動(dòng)簡(jiǎn)單,不在這里做分析莽烫,本文主要針對(duì)其余的6桿機(jī)構(gòu)構(gòu)成的封閉鏈瞭谴,進(jìn)行分析計(jì)算,建立坐標(biāo)如圖3-1所示:
建立回路1矢量方程:

汉渣, (1)
同理册压,建立回路2矢量方程:

(2)
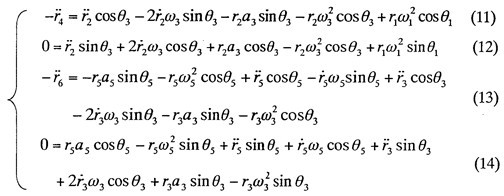
對(duì)上述兩個(gè)矢量方程式寫成標(biāo)量形式的方程式,如下:
同樣赶匣,兩邊再對(duì)時(shí)間求導(dǎo)捕诲,整理,可得出加速度分析式:
則同理卿怀,知:
該機(jī)構(gòu)本身是兩自由度機(jī)構(gòu)卿裙,但是在本文中,它須滿足設(shè)計(jì)要求镣凯,即作為可調(diào)整機(jī)構(gòu)外卷,它在單自由度情況下砍的,通過事先調(diào)整桿長比例,在第二輸入不加的的時(shí)候莺治,也可以達(dá)到比較理想的補(bǔ)償效果挨约,伺服電機(jī)電機(jī)驅(qū)動(dòng)的第二輸入是起補(bǔ)償作用,微調(diào)桿長比例的产雹。所以運(yùn)動(dòng)分析分兩種情況诫惭,一種是單自由度下的運(yùn)動(dòng)狀況,第二種是加入微調(diào)函數(shù)進(jìn)行的運(yùn)動(dòng)分析蔓挖。
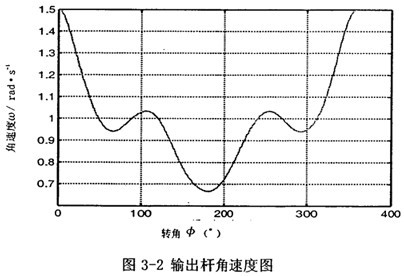
第一種情況設(shè)曲柄輸入角速度ω=1 rad/s夕土,第二輸入速度為零,這時(shí)相當(dāng)于一個(gè)單自由度機(jī)構(gòu)瘟判,螺旋傳動(dòng)未起作用怨绣。機(jī)構(gòu)的結(jié)構(gòu)在初始狀態(tài)是完全對(duì)稱的,運(yùn)用matlab編程計(jì)算拷获,得出運(yùn)動(dòng)分析結(jié)果篮撑,如圖3-2所示。
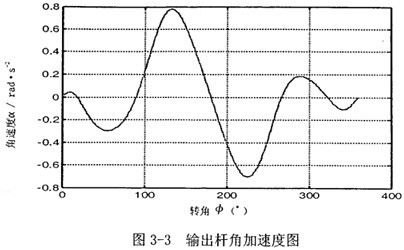
首先由圖3-2可以看到匆瓜,若機(jī)構(gòu)結(jié)構(gòu)參數(shù)設(shè)計(jì)恰當(dāng)电伐,并且調(diào)整中間滑塊3偏移到合適的位置時(shí),可在一定范圍內(nèi)跪悼,產(chǎn)生一個(gè)反向的速度波適度抵消原速度波動(dòng)秆杰。再由圖3-3可知,在未加入第二自由度時(shí)蚊来,加速度變化值不大蝠肤,說明阻力矩和電機(jī)主動(dòng)力矩不會(huì)受到大的影響,不致導(dǎo)致原機(jī)械系統(tǒng)的各項(xiàng)參數(shù)發(fā)生大的變化逢君。
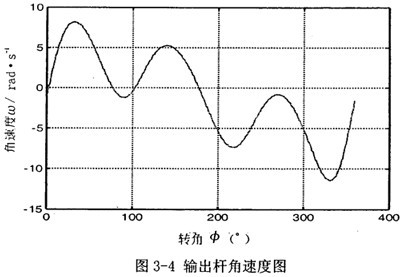
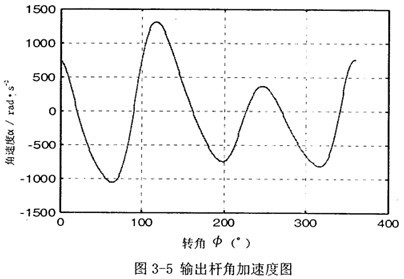
第二種情況 第一輸入速度和第一種情況的速度值相同吝啰,現(xiàn)第二輸入經(jīng)螺旋機(jī)構(gòu)轉(zhuǎn)化為往復(fù)運(yùn)動(dòng)后,輸入速度為v=sinθ1(θ1為第一輸入角位移)蒲妹,即為滑塊3的速度驻丁,再編程計(jì)算,得出結(jié)果如圖3-4蚯垫,圖3-5所示闲涕。
有上述圖3-4和圖3-5可知,引入第二自由度時(shí)咳碰,原速度波加速度波發(fā)生很大變化剖毯,這和第二自由度引入的驅(qū)動(dòng)函數(shù),有很大關(guān)系,所以應(yīng)采用合理可行的控制函數(shù)逊谋,才能取得理想的速度輸出擂达。這將為后面的控制策略提供參考。
§3.4本章小節(jié)
本章對(duì)柔性速度補(bǔ)償裝置的機(jī)械機(jī)構(gòu)胶滋,進(jìn)行了運(yùn)動(dòng)學(xué)分析板鬓。借助Matlab計(jì)算軟件編程解出了多組非線性方程,并分單自由度情況和兩自由度情況給出速度和加速度圖究恤,可以直觀的看到通過柔性速度補(bǔ)償裝置本身產(chǎn)生的速度波動(dòng)來抵消機(jī)械運(yùn)行中產(chǎn)生的速度波動(dòng)俭令,為后面章節(jié)的動(dòng)力學(xué)分析提供理論依據(jù)。