實(shí)驗(yàn)方案
實(shí)驗(yàn)是驗(yàn)證所設(shè)計(jì)的柔性速度補(bǔ)償裝置是否達(dá)到設(shè)計(jì)要求的最有力手段社殉。
本章制定的實(shí)驗(yàn)方案是以驗(yàn)證前文的理論分析及仿真結(jié)果和實(shí)驗(yàn)結(jié)論是否一致陷龟,實(shí)驗(yàn)方案內(nèi)容包括實(shí)驗(yàn)平臺(tái)的搭建、子系統(tǒng)的結(jié)構(gòu)和原理兩部分扑认。
§5.1實(shí)驗(yàn)方案
對(duì)該柔性速度補(bǔ)償裝置進(jìn)行實(shí)驗(yàn)研究逻事,能夠驗(yàn)證機(jī)械系統(tǒng)、控制系統(tǒng)犯舆、運(yùn)動(dòng)設(shè)計(jì)的有效性畜溺,發(fā)現(xiàn)設(shè)計(jì)中存在的問(wèn)題或理論中某些缺陷,為系統(tǒng)優(yōu)化提供實(shí)驗(yàn)指導(dǎo)壮僵。
在本文中理章,以常速電機(jī)和微機(jī)控制的交流伺服電機(jī)為原動(dòng)機(jī),與控制器清腌,以及柔性速度補(bǔ)償裝置機(jī)構(gòu)為實(shí)驗(yàn)載體厂均,輔以檢測(cè)系統(tǒng),建立了柔性速度補(bǔ)償裝置的主動(dòng)控制實(shí)驗(yàn)系統(tǒng)幸亭。
5.1.1試驗(yàn)平臺(tái)的搭建
實(shí)驗(yàn)系統(tǒng)包括柔性速度補(bǔ)償裝置的機(jī)械執(zhí)行子系統(tǒng)仗扬、微機(jī)控制子系統(tǒng)及傳感檢測(cè)子系統(tǒng)三部分。
試驗(yàn)平臺(tái)模型示意圖采用三維繪圖軟件Pro/E繪制蕾额。
PRo/E是CAD/CAM/CAE領(lǐng)域的一個(gè)三維圖形軟件早芭,在機(jī)械、電子诅蝶、航空退个、航天、郵電调炬、兵工语盈、紡織等各行各業(yè)都有應(yīng)用舱馅。
PRO/ENGINEER軟件包的產(chǎn)品開(kāi)發(fā)環(huán)境支持并行工作,它通過(guò)一系列完全相關(guān)的模塊表述產(chǎn)品的外形刀荒、裝配及其他功能代嗤,包括對(duì)大型項(xiàng)目的裝配體管理、功能仿真缠借、制造干毅、數(shù)據(jù)管理等。
如圖5-1所示為實(shí)驗(yàn)系統(tǒng)機(jī)械部分的模型圖片泼返,為了顯示清楚等盏,沒(méi)有配置外邊的機(jī)箱,整個(gè)機(jī)構(gòu)是完全開(kāi)放式的沥卦,這樣也便于實(shí)驗(yàn)觀察缩睛。該機(jī)械結(jié)構(gòu)由上下兩個(gè)機(jī)架支撐,和前面的原理圖不同辩钢,下邊機(jī)架上放置昆旋導(dǎo)軌構(gòu)件(未顯示伺服電機(jī))辉召,上邊機(jī)架則是上圖所示的其余連桿機(jī)構(gòu)及其支撐架、軸承等(未顯示常速電機(jī))吹兴。

基于圖5-1所示機(jī)構(gòu)骑枯,配置伺服驅(qū)動(dòng)裝置、傳感器以及計(jì)算機(jī)控制系統(tǒng)施揪,獲得該柔性速度補(bǔ)償裝置的原型涡税,如圖5-2所示。
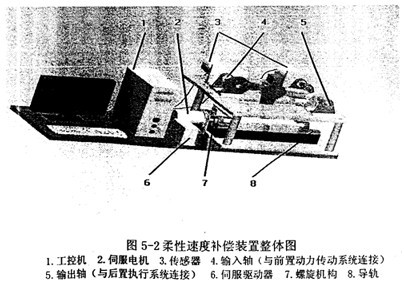
圖中比較完整的顯示了整個(gè)實(shí)驗(yàn)系統(tǒng)交某,主要由兩部分組成:機(jī)械系統(tǒng)和控制系統(tǒng)醇锌,機(jī)械系統(tǒng)如上圖5-1所示,控制部分由信息處理系統(tǒng)分和檢測(cè)系統(tǒng)組成麻诀。信息系統(tǒng)包括工控機(jī)痕寓,圖中1所示,數(shù)據(jù)采集卡及數(shù)/模蝇闭、模/數(shù)轉(zhuǎn)換器等呻率,圖中未顯示,以及伺服電機(jī)呻引,圖中6所示礼仗。檢測(cè)系統(tǒng)主要是傳感器,它們和各輸入輸出軸相連逻悠。
根據(jù)功能元践,又可將實(shí)驗(yàn)系統(tǒng)劃分為中央控制系統(tǒng)、伺服驅(qū)動(dòng)系統(tǒng)、兩自由度連桿機(jī)構(gòu)系統(tǒng)单旁、檢測(cè)系統(tǒng)沪羔、接口元件和能源等若干子系統(tǒng),如表5-1所示。
表5-l實(shí)驗(yàn)系統(tǒng)組成
|
系統(tǒng)
名稱 |
一級(jí)子系統(tǒng) |
功能 |
二級(jí)子系統(tǒng) |
功能 |
|
柔性
速度
補(bǔ)償
裝置
控制
實(shí)驗(yàn)
系統(tǒng) |
中央控制
系統(tǒng) |
總體調(diào)度 |
工控機(jī) |
1.控制算法的執(zhí)行
2.控制伺服驅(qū)動(dòng)器
3.采集檢測(cè)元件信號(hào)
4.數(shù)據(jù)處理 |
|
控制柜 |
1.電源及接口線路轉(zhuǎn)接
2.伺服系統(tǒng)狀態(tài)信息象浑。 |
|
伺服驅(qū)動(dòng)
系統(tǒng) |
驅(qū)動(dòng)并控制
伺服電機(jī)
|
伺服驅(qū)動(dòng)器 |
1.接受上位控制系統(tǒng)指令控制
交流伺服馬達(dá)
2.向中央控制系統(tǒng)反饋伺服
系統(tǒng)狀態(tài)信息蔫饰。 |
|
交流伺服馬達(dá) |
驅(qū)動(dòng)兩自由度連桿機(jī)構(gòu) |
|
光電編碼器 |
馬達(dá)軸位置檢測(cè)與反饋 |
|
兩自由度連
桿機(jī)構(gòu)系統(tǒng) |
實(shí)驗(yàn)載體
|
第一輸入 |
常速電機(jī)驅(qū)動(dòng)提供主運(yùn)動(dòng) |
|
第二輸入 |
伺服電機(jī)驅(qū)動(dòng),螺旋機(jī)構(gòu)轉(zhuǎn)
化旋轉(zhuǎn)運(yùn)動(dòng)為往復(fù)運(yùn)動(dòng) |
|
輸出軸 |
從動(dòng)件 |
|
機(jī)架 |
支撐 |
|
檢測(cè)系統(tǒng) |
狀態(tài)檢測(cè) |
編碼器 |
常速電機(jī)庸灶、伺服電機(jī)腐熊、輸出軸速度檢測(cè) |
|
接口元件 |
負(fù)責(zé)中央控
制系統(tǒng)與其
他系統(tǒng)之間
的信息交換 |
D/A轉(zhuǎn)換器 |
將工控機(jī)發(fā)出的數(shù)字指令轉(zhuǎn)
換為模擬電壓輸送至伺服驅(qū)
動(dòng)器 |
|
A/D轉(zhuǎn)換器
|
將模擬信號(hào)轉(zhuǎn)換為數(shù)字量送
至工控機(jī) |
|
|
|
數(shù)據(jù)采集卡 |
采集編碼器的數(shù)據(jù) |
|
能源 |
供電 |
380V市電 |
為工控機(jī)、伺服驅(qū)動(dòng)器等提供電源 |
|
電源變壓器 |
將380V交流電變?yōu)樗欧?qū)
動(dòng)器所需165V交流電 |
|
軟件Labview |
編程計(jì)算 |
|
|
在實(shí)驗(yàn)系統(tǒng)中窘携,工控機(jī)構(gòu)成上位控制器,是數(shù)字控制器查新;伺服驅(qū)動(dòng)器構(gòu)成下位控制器杀终,是模擬控制器。因此批先,組成了一個(gè)數(shù)字與模擬混合控制的速度控制系統(tǒng)息聪。
實(shí)驗(yàn)的工作程序?yàn)椋?SPAN lang=EN-US>
1.預(yù)處理:工控機(jī)將已計(jì)算完成預(yù)初值數(shù)據(jù)調(diào)入內(nèi)存,根據(jù)采樣周期作插分計(jì)算將轉(zhuǎn)速函數(shù)離散化囤胯。
2.初始化:初始化數(shù)據(jù)采集卡员研、數(shù)/模、模/數(shù)轉(zhuǎn)換器等蚪缚。
3.控制及采集:在每一采樣周期開(kāi)始時(shí)刻阶质,工控機(jī)發(fā)出電機(jī)轉(zhuǎn)速一脂令,經(jīng)數(shù)模轉(zhuǎn)換器作D/A變換后輸出米苹。伺服驅(qū)動(dòng)器接受指令后糕伐,進(jìn)行計(jì)算后驅(qū)動(dòng)電機(jī)。在每一采樣周期中蘸嘶,工控機(jī)將依次采集三路信號(hào)良瞧,讀取這些數(shù)據(jù)。
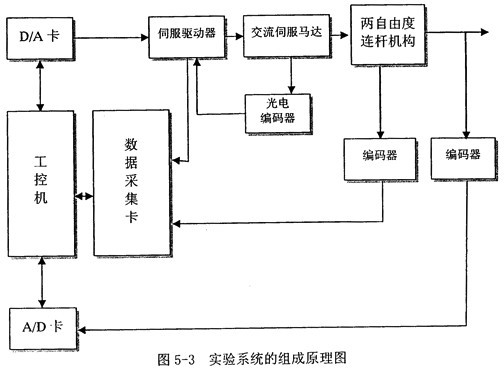
4.數(shù)據(jù)處理:(l)微機(jī)將電機(jī)位置信號(hào)作數(shù)值微分求得電機(jī)轉(zhuǎn)速训唱。(2)微機(jī)用數(shù)字濾波程序?qū)⒓铀俣刃盘?hào)作濾波褥蚯、數(shù)值積分等處理。如圖5-3所示為實(shí)驗(yàn)系統(tǒng)的組成原理圖:
<, /P>
5.1.2子系統(tǒng)的結(jié)構(gòu)和原理
(l)中央控制系統(tǒng)
中央控制系統(tǒng)包括微機(jī)及控制柜况增,負(fù)責(zé)實(shí)驗(yàn)系統(tǒng)的總體調(diào)度與控制赞庶。
(2)伺服驅(qū)動(dòng)系統(tǒng)
伺服驅(qū)動(dòng)系統(tǒng)包括伺服驅(qū)動(dòng)器、交流伺服馬達(dá)及光電編碼器巡通,伺服電機(jī)是該控制系統(tǒng)的關(guān)鍵執(zhí)行元件尘执。伺服電機(jī)是控制電機(jī)的一種,在自動(dòng)控制系統(tǒng)中是一類小功率電機(jī)宴凉,用于信號(hào)的檢測(cè)誊锭、變換和傳遞表悬,作執(zhí)行元件或信號(hào)元件。伺服電動(dòng)機(jī)把輸入的電壓信號(hào)變換成轉(zhuǎn)軸的角位移或角速度輸出市砍,改變輸入電壓信號(hào)可以變更伺服電動(dòng)機(jī)的轉(zhuǎn)速及轉(zhuǎn)向俏川。相比較于普通電機(jī)伺服電機(jī)具有寬廣的調(diào)速范圍,機(jī)械特性和調(diào)速特性均為線性射疤,無(wú)自轉(zhuǎn)現(xiàn)象符殊,(控制電壓降到零時(shí),伺服電機(jī)能立即自行停轉(zhuǎn))倾桩,快速響應(yīng)好等特性倘秸。
經(jīng)過(guò)分析比較,和一些老師的建議眼骗,交流伺服電機(jī)準(zhǔn)備選用四通電機(jī)(6OCB04OC)型號(hào)的轨皮。
(3)兩自由度連桿機(jī)構(gòu)
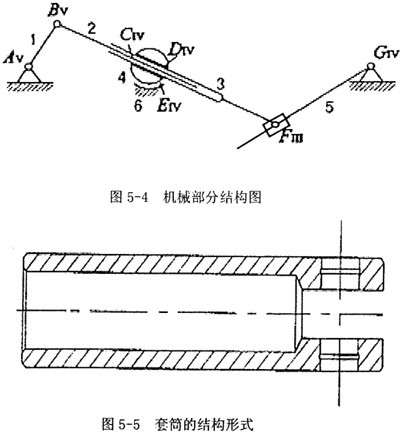
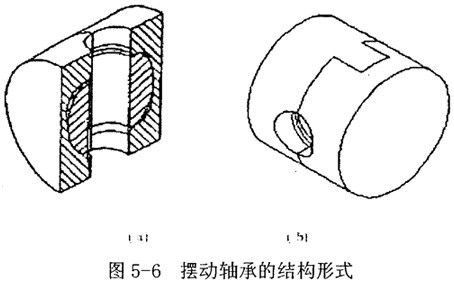
首先將原來(lái)的原理圖轉(zhuǎn)換成以下的機(jī)構(gòu)結(jié)構(gòu)圖(僅部分轉(zhuǎn)換),如圖5-4方秤,即原來(lái)2燎厘、3構(gòu)件之間是滑塊和連桿連接,現(xiàn)改為連桿益锻、套筒改為加一個(gè)擺動(dòng)軸結(jié)構(gòu)蠢琳,原來(lái)滑塊3和地面連接,容易形成過(guò)約束镜豹,改為加一個(gè)擺動(dòng)軸承4來(lái)和地面傲须、套筒來(lái)連接。擺動(dòng)軸承內(nèi)芯相當(dāng)于一個(gè)球副逛艰,其轉(zhuǎn)動(dòng)中心必為內(nèi)芯的球心躏碳,當(dāng)然也是整個(gè)擺動(dòng)軸承的中心。這樣便于加工查和實(shí)驗(yàn)實(shí)施散怖,而且更重要的是可防止原來(lái)原理圖中桿件連接出形成過(guò)約束菇绵。
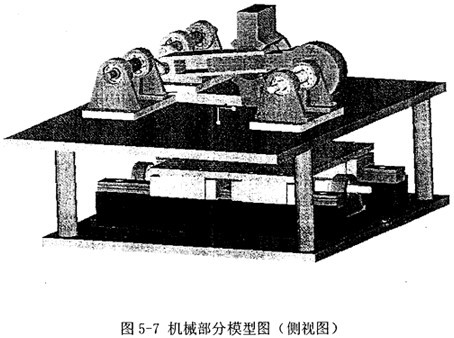
經(jīng)過(guò)適當(dāng)修改后的,機(jī)構(gòu)具有更好的運(yùn)動(dòng)特性镇眷,機(jī)械部分整體模型如圖5-7所示:
(4)檢測(cè)元件
檢測(cè)系統(tǒng)由微機(jī)咬最、檢測(cè)元件和接口元件組成。檢測(cè)系統(tǒng)對(duì)柔性速度補(bǔ)償裝置中運(yùn)動(dòng)參數(shù)進(jìn)行檢測(cè)欠动,為控制器提供數(shù)據(jù)永乌。檢測(cè)元件的參數(shù)這里沒(méi)有給出,因?yàn)樵S多元件還不是很確定具伍,一些功能還不了解翅雏。
§5.2本章小節(jié)
實(shí)驗(yàn)方案以微機(jī)控制的交滾伺服電機(jī)為原動(dòng)機(jī)之一與控制器、以兩自由度連桿機(jī)構(gòu)為實(shí)驗(yàn)載體,輔以檢測(cè)系統(tǒng)咒娶,建立了一個(gè)柔性速度補(bǔ)償裝置控制的實(shí)驗(yàn)系統(tǒng)仍枕。
該產(chǎn)驗(yàn)系統(tǒng)在硬件、軟件等方面均作了詳細(xì)的研究吗罪,尤其硬件方面尚蔗,參考了一些其他著者的文獻(xiàn),但是因?yàn)闆](méi)有做到實(shí)施實(shí)驗(yàn)的目標(biāo)话贯,所以實(shí)驗(yàn)結(jié)果無(wú)法看到篡搓,這是本課題最大的遺憾。
