三環(huán)減速器的動(dòng)力模型及動(dòng)力特性研究
5.1 引言
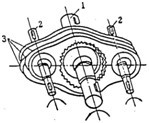
三環(huán)減速器是一種利用三相并列雙曲柄機(jī)構(gòu)來(lái)克服死點(diǎn)的連桿內(nèi)齒行星齒輪減速器超埋,其基本結(jié)構(gòu)如圖5-0所示门痕。它由低速輸出軸1 ,兩根高速輸入軸2 ,三片傳動(dòng)齒板3組成背渤,各軸均平行配置灸叼,相同的兩根高速軸帶動(dòng)三片傳動(dòng)齒板呈120°相位差作平面轉(zhuǎn)動(dòng)蹂孽,傳動(dòng)環(huán)板上的內(nèi)齒圈與低速軸上的外齒輪相嚙合祥怖,形成大速比,其傳動(dòng)比
三環(huán)傳動(dòng)結(jié)構(gòu)
圖5-1
(5-0)
式中

Z
1是低速軸上外齒輪齒數(shù)转挽;
Z
2是齒板內(nèi)齒輪齒數(shù)漫诬。
三環(huán)減速器的主要優(yōu)點(diǎn)是:
1.傳動(dòng)比大、適應(yīng)性廣届审,由于采用漸開線少齒差內(nèi)嚙合傳動(dòng)胀垃,可以獲得較大的傳動(dòng)比,單級(jí)傳動(dòng)比達(dá)11~99俭柒,雙級(jí)傳動(dòng)比高達(dá)9801径候;又因?yàn)闇p速器的中心距與齒輪參數(shù)無(wú)關(guān),可根據(jù)需要設(shè)計(jì)帅维,故其適應(yīng)性廣。
2.承載能力強(qiáng)协固,且重量輕溢傅。內(nèi)嚙合齒輪由于接觸點(diǎn)處齒廓曲率方向相同,所以齒面接觸強(qiáng)度較高芋忿,同時(shí)由于少齒差傳動(dòng)的多齒接觸承載特點(diǎn)炸客,隨著載荷增加,接觸承載齒數(shù)也隨之增加戈钢,故三環(huán)減速器有很強(qiáng)的承載能力和過(guò)載能力痹仙,可承受過(guò)載27倍是尔。又由于三環(huán)減速器的結(jié)構(gòu)簡(jiǎn)單,傳動(dòng)比大开仰、所以其重量輕拟枚,比普通圓柱齒輪減速器重量相應(yīng)減小2/3。
3.傳動(dòng)效率高众弓。三環(huán)減速器的效率主要由兩部分組成恩溅,即嚙合效率及軸承效率。它比一般少齒差傳動(dòng)(K-H-V)少一個(gè)輸出機(jī)構(gòu)谓娃,故效率可高達(dá)96%脚乡。
4.軸承受力小,壽命長(zhǎng)滨达。三環(huán)減速器的行星軸承受力與K-H-V型行星軸承受力相比奶稠,K-H-V型行星軸承受力約為三環(huán)減速器的1.86倍,而行星軸承的壽命恃打,三環(huán)的約為K-H-V型的6倍以上钟唯。
由于以上優(yōu)點(diǎn),三環(huán)減速器正在日益推廣懒俊,目前己在礦山掏谎、冶金、石油钮瘪、化工锄菊、起重運(yùn)輸、
經(jīng)工等眾多領(lǐng)域?qū)嶋H應(yīng)用湿铃,取得了一定的社會(huì)效益和經(jīng)濟(jì)效益占犹,通過(guò)進(jìn)一步的理論分析、試驗(yàn)研究和技術(shù)推廣碉办,有可能成為新一代通用減速器理币。
但是,由于三環(huán)減速器問(wèn)世僅幾年時(shí)間虐干,缺乏較全面的理論分析和實(shí)驗(yàn)研究聋亡,在設(shè)計(jì)只得采用類比的方法或借助于非常粗略的簡(jiǎn)化模型進(jìn)行計(jì)算,設(shè)計(jì)工作缺乏依據(jù)际乘,使得產(chǎn)品性能環(huán)穩(wěn)定坡倔、在應(yīng)用中出現(xiàn)發(fā)熱、振動(dòng)脖含、軸承早期損壞甚至齒板斷裂等現(xiàn)象罪塔,影響了這種傳動(dòng)形式的進(jìn)一步發(fā)展。
本章應(yīng)用本文提出的位移協(xié)調(diào)原理养葵,從系統(tǒng)變形的角度征堪,建立了三環(huán)減速器的動(dòng)力分析精確模型瘩缆,并針對(duì)SHQ40型三環(huán)減速器進(jìn)行求解,研究了各種因素對(duì)其動(dòng)力特性的影響佃蚜。
5.2 三環(huán)減速器動(dòng)力分析基本方程
三環(huán)減速器是三相并列雙曲柄輸入式的少齒差內(nèi)齒行星傳動(dòng)裝置庸娱。因此可按第三章對(duì)內(nèi)齒行星傳動(dòng)建模方法,建立其動(dòng)力分析模型爽锥。
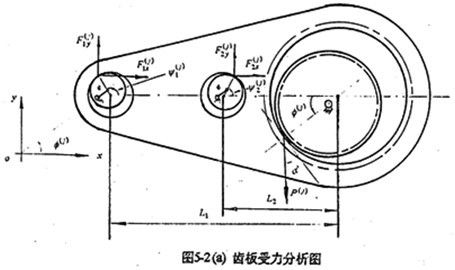
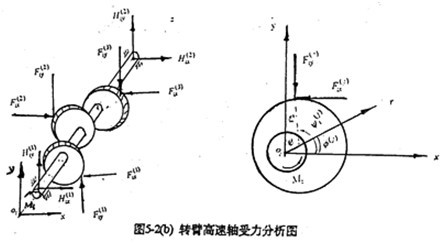
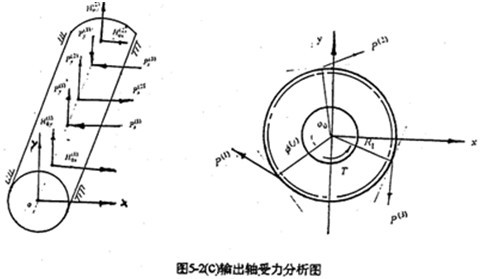
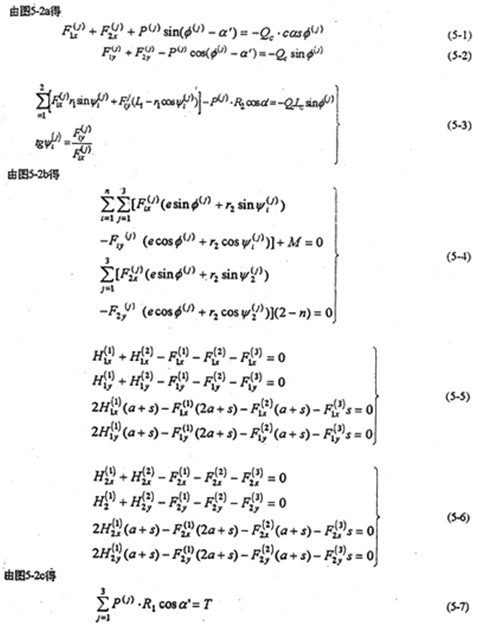
對(duì)齒板及高速轉(zhuǎn)臂軸涌韩,輸出軸進(jìn)行動(dòng)態(tài)靜力分析(見圖5-2),可得三環(huán)減速器的動(dòng)力分析基本方程(忽略各構(gòu)件重力作用)匙杏。
根據(jù)對(duì)三環(huán)減速器的靜不定次數(shù)計(jì)算模朋,當(dāng)單軸輸入(n=1)時(shí),S=4充陷,雙軸輸入(n=2)時(shí)谆府,S=5。故應(yīng)根據(jù)輸入形式徊儿,由位移協(xié)調(diào)節(jié)器條件增加4個(gè)或5個(gè)動(dòng)力分析補(bǔ)充方程灯趁。
5.3三環(huán)減速器的動(dòng)力分析補(bǔ)充方程
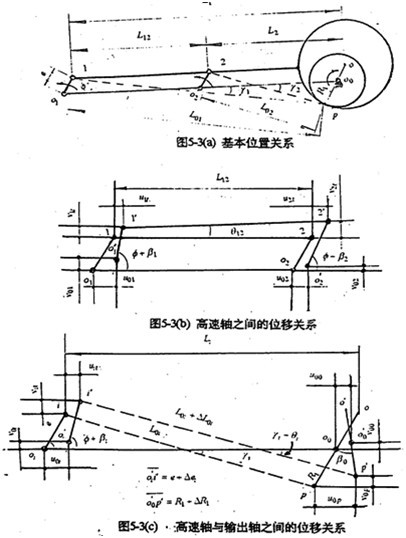
三環(huán)減速是多相并列連桿行星齒輪傳動(dòng)過(guò)約束機(jī)構(gòu)。應(yīng)該從整體系統(tǒng)上去考慮其變形關(guān)系泼剩。圖5-3是一相子機(jī)構(gòu)的位移關(guān)系圖稼炉。圖5-3(a)是基本位置圖、圖5-3(b)是高速軸之間的位移關(guān)系瓜释、圖5-3(c)是高速軸與輸出軸之間的位移關(guān)系(i=1草嫉、2)。由圖寫出各運(yùn)動(dòng)副中心的位移關(guān)系如下:
以上各式中

险锻,

是偏心套中心的位移症慰;

是偏心套偏心距 變形量;

是齒對(duì)接觸點(diǎn)與外齒輪中心的距離變化量现喳;

是機(jī)構(gòu)變形使高速軸產(chǎn)生的角位移凯傲;

是機(jī)構(gòu)變形使低速軸產(chǎn)生的角位移;

是高速軸軸心因箱體軸承變形及軸彎曲變形產(chǎn)生的位移嗦篱;

是機(jī)構(gòu)變形使嚙合點(diǎn)產(chǎn)生的位移冰单;

是低速軸中心因箱體軸承變形及軸彎曲變形產(chǎn)生的位移;

是機(jī)構(gòu)變形引起各運(yùn)動(dòng)副中心之間的距離產(chǎn)生的相對(duì)位移量灸促;
是各運(yùn)動(dòng)副中心連結(jié)因機(jī)構(gòu)變形產(chǎn)生的角位移球凰。
式中
當(dāng)只考慮行星軸承變形和內(nèi)齒圈變形時(shí),式(5-18)及(5-19)就變成(3-11)腿宰、(3-14)。
上式的第一式即為高速軸之間的約束條件缘厢,第二式為高速軸與低速軸(輸出軸)之間的約束條件吃度,消去試中的

可得4個(gè)補(bǔ)充方程甩挫,滿足單軸輸入(n=1)所需的動(dòng)力分析補(bǔ)充方程的數(shù)量(S=4)。對(duì)于雙軸輸入(n=2)椿每,若分流機(jī)構(gòu)為齒輪傳動(dòng)伊者,則由式(3-12b)增加一個(gè)補(bǔ)充方程得
由式(5-18)砂腰、(5-19)、(5-22)潘娄、(5-23)就構(gòu)成三環(huán)減速器的動(dòng)力分析補(bǔ)充方程持拐。將它們與三環(huán)減速器的動(dòng)力分析基本方程聯(lián)解,可以確定出的運(yùn)動(dòng)副的動(dòng)反力及齒板略菜、軸等的變形角位移侵宝,隨轉(zhuǎn)角(或時(shí)間)的函數(shù)關(guān)系。各齒板省喝、軸的角位移與轉(zhuǎn)角φ的關(guān)系可表示成:
上式是三環(huán)減速器轉(zhuǎn)動(dòng)時(shí),各齒板输拇、軸在機(jī)構(gòu)變形時(shí)的角位移關(guān)系式策吠,將其求導(dǎo)(對(duì)時(shí)間)可得角速度瘩绒、角加速度關(guān)系。
式(5-18)中的

為機(jī)構(gòu)變形后兩偏心套中心之間的長(zhǎng)度L
12產(chǎn)生的增量分量蟀给,它包括齒板兩高速軸孔之間的相對(duì)變形量跋理,兩行量軸承的變形量,兩偏心套的變形量以及兩運(yùn)動(dòng)副的間隙等前普÷筝可表為
式中

是齒板高速軸孔周邊變形剛度,見表4-3木鸭;

是行星軸承變形剛度淹摧,由文獻(xiàn),

=4.48×10
5N/mm蚣锌;

是偏心套外圓周邊變形剛度计浮,見表4-1加六;

是運(yùn)動(dòng)副間隙在x、y方向的分量姑宽。
表4-3
|
|
|
|
|
|
0 |
3.2115 |
180 |
12.4935 |
|
10 |
3.2757 |
190 |
14.6264 |
|
20 |
3.45 |
200 |
12.8562 |
|
30 |
3.678 |
210 |
13.1985 |
|
40 |
4.243 |
220 |
14.4738 |
|
50 |
4.969 |
230 |
15.4107 |
|
60 |
6.1059 |
240 |
18.7727 |
|
70 |
7.9875 |
250 |
24.052 |
|
80 |
11.2872 |
260 |
24.7488 |
|
90 |
17.4852 |
270 |
16.5972 |
|
100 |
24.997 |
280 |
10.959 |
|
110 |
22.555 |
290 |
7.8687 |
|
120 |
17.496 |
300 |
6.0639 |
|
130 |
14.5707 |
310 |
4.956 |
|
140 |
13.256 |
320 |
4.2411 |
|
150 |
12.74 |
330 |
30.7701 |
|
160 |
12.5496 |
340 |
3.4509 |
|
170 |
12.4656 |
350 |
3.279 |
表4-1
|
|
K(109)N/m |
|
K(109)N/m |
|
K(109)N/m |
|
K(109)N/m |
|
0 |
6.3991 |
90 |
5.0111 |
180 |
5.2938 |
270 |
5.0111 |
|
5 |
2.4935 |
95 |
3.6888 |
185 |
3.4579 |
275 |
2.9738 |
|
10 |
3.6130 |
100 |
3.3156 |
190 |
4.5799 |
280 |
10.016 |
|
15 |
3.2837 |
105 |
6.0076 |
195 |
2.8184 |
285 |
2.8762 |
|
20 |
2.7938 |
110 |
2.7578 |
200 |
9.0791 |
290 |
7.5409 |
|
25 |
5.2028 |
115 |
1.1512 |
205 |
2.6340 |
295 |
3.2680 |
|
30 |
2.5736 |
120 |
2.7683 |
210 |
10.735 |
300 |
4.2517 |
|
35 |
9.1607 |
125 |
5.7354 |
215 |
2.8139 |
305 |
4.4096 |
|
40 |
2.6608 |
130 |
3.3017 |
220 |
4.9712 |
310 |
3.1247 |
|
45 |
7.2520 |
135 |
3.5187 |
225 |
3.5187 |
315 |
7.2520 |
|
50 |
3.1247 |
140 |
4.9712 |
230 |
3.3017 |
320 |
2.6608 |
|
55 |
4.4096 |
145 |
2.8139 |
235 |
5.7354 |
325 |
9.1607 |
|
60 |
4.2517 |
150 |
10.735 |
240 |
2.7683 |
330 |
2.5736 |
|
65 |
3.2680 |
155 |
2.6340 |
245 |
1.1512 |
335 |
5.2028 |
|
70 |
7.5409 |
160 |
9.0791 |
250 |
2.7578 |
340 |
2.7938 |
|
75 |
2.8762 |
165 |
2.8184 |
255 |
6.0676 |
345 |
3.2837 |
|
80 |
10.016 |
170 |
4.5799 |
260 |
3.3156 |
350 |
3.6130 |
|
85 |
2.9738 |
175 |
3.4597 |
265 |
3.6888 |
355 |
2.4935 |
式(5-19)中的

是嚙合接觸點(diǎn)p與偏心套中心的距離因機(jī)構(gòu)變形產(chǎn)生的變形增量锨耍。它包括齒板嚙合接觸點(diǎn)與高速軸孔中心的相對(duì)變形量灯忙、行星軸承的變形量、偏心套的變形量以及運(yùn)動(dòng)副間隙、輪齒齒形誤差等完株。可表示為
式中

是齒圈變形剛度辐杜,見表4-2显钙;

是齒形法向誤差在坐標(biāo)軸方向的分量;

是高速軸軸心的位移展辞,它是由由箱體軸承變形及軸的彎曲變形引起的万牺,即
式中

由(4-63)計(jì)算。
表4-2
|
φ K(108)N/m |
φ K(108)N/m |
φ K(108)N/m |
|
1.4285 2.633 |
121.4285 1.592 |
241.4286 0.551 |
|
7.1428 2.477 |
127.1428 1.143 |
247.1428 0.676 |
|
12.8571 2.280 |
132.8571 0.8665 |
252.857 0.860 |
|
18.5714 2.108 |
138.5714 0.6805 |
258.5714 1.127 |
|
24.2857 2.018 |
144.2857 0.5528 |
264.2857 1.566 |
|
30.00 2.000 |
150.0000 0.4625 |
270.0000 2.298 |
|
35.7142 2.042 |
155.7142 0.3980 |
275.7143 3.351 |
|
41.4285 2.181 |
161.4285 0.3512 |
281.4286 6.055 |
|
47.1428 2.376 |
167.1428 0.3168 |
287.1429 10.53 |
|
52.8571 2.712 |
172.8571 0.2926 |
292.8571 17.99 |
|
58.5714 3.223 |
178.5714 0.276 |
298.5714 20.41 |
|
64.2857 3.994 |
184.2857 0.2662 |
304.2857 14.656 |
|
69.9999 5.407 |
190.0000 0.2615 |
310.0000 9.91 |
|
75.7142 7.808 |
195.7143 0.2624 |
315.7143 6.526 |
|
81.4285 12.62 |
201.4286 0.2688 |
321.43 4.835 |
|
87.1428 18.75 |
207.1428 0.27915 |
327.1429 3.77 |
|
92.8571 19.76 |
212.8571 0.2969 |
332.8571 3.143 |
|
98.5714 12.50 |
218.7714 0.322 |
338.5714 2.772 |
|
104.2857 6.641 |
224.2857 0.358 |
344.2857 2.608 |
|
110.0000 3.755 |
230.0000 0.443 |
350.0000 2.565 |
|
115.7142 2.356 |
235.714 0.466 |
355.77143 2.612 |
低速軸軸心位移

也是由箱體軸承變形及低速軸彎曲變形組成。但由于低速軸的法向尺寸較大曲聂、彎曲變形很小佑惠,故可忽略不計(jì),只考慮箱體軸承的變形則有
式(5-27)及式(5-28)中s是兩則齒板靠近箱體的距離披锨,a是齒板之間的距離。取箱體軸承的剛度

毛咸。偏心套的徑向變形

以及外齒輪的徑向變形

均很微小除阐,故一般忽略不計(jì)。
高速軸的扭軸變形

由式)(4-59)計(jì)算毛彼。低速軸因徑向尺寸比高速軸的遠(yuǎn)遠(yuǎn)大异凹,故其變形可忽略不計(jì)努释。
5.4三環(huán)減速器的載荷分布
三環(huán)減速器的載荷有嚙合力、行星軸承載荷以及箱體軸承載荷伐蒂。其分布情況直接反映出三環(huán)減速器的動(dòng)力學(xué)性能饿自。下面分析SHQ40型三環(huán)減速器的載荷分布特性。SHQ40的有關(guān)參數(shù)為
i=20 z1=60 z=63 m=4 e=6.392mm a′=28.10 a=200 T=4000Nm n=1000rmp L1=400mm L2=210mm B=30mm s-55mm d=34mm
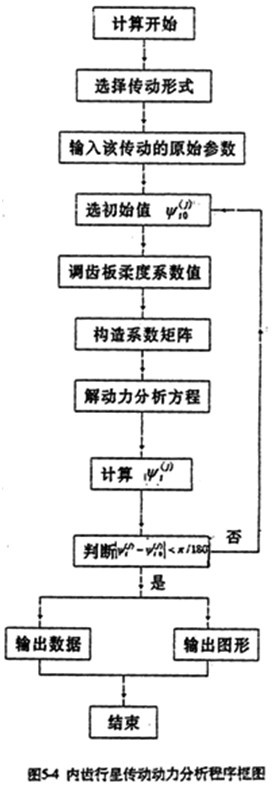
在不計(jì)各種誤差且機(jī)構(gòu)變形很小時(shí)复唤,將以上參數(shù)代入三環(huán)減速器的非線性動(dòng)力分析方程式(5-1)~(5-8)烛卧、(5-18)、(5-19)呈宇、(5-22)~(5-23)等方程侥嫂,在計(jì)算機(jī)上求解,就可求得三環(huán)減速器各載荷隨工況角φ的變化規(guī)5-4為計(jì)算程圖莽入。
5.4.1 嚙合力分析規(guī)律
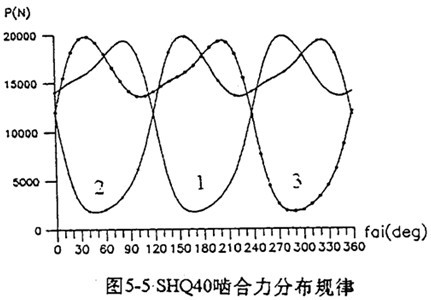
SHQ40型三環(huán)減速器的嚙合力隨φ的變化規(guī)律如圖5-5所錄。由圖可以看出嚙合力的以下規(guī)律:
1.三片齒板上對(duì)應(yīng)的嚙合圖變化規(guī)律完全機(jī)同余源,彼此相位差為120°,以360°為擊期限變化遭歉。
2.無(wú)論在什么工況三片齒板的嚙合力之和總為常數(shù)袖指,但各片齒板的嚙合力并不一定相等肪援。即
3.在一個(gè)周期內(nèi)笋熬,各齒板的嚙合力均各取得兩次數(shù)值不等的極小值和兩次數(shù)值相近的極大值腻菇。第一片齒板的極值點(diǎn)為
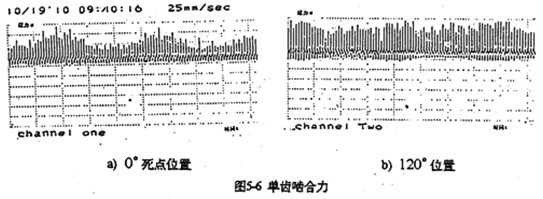
理想情況下昔馋,嚙合力的極小值在φ=0°、180°產(chǎn)生丘薛,極大值在φ=90°邦危、270°產(chǎn)生,造成位置偏離的影響因素主要有軸承剛度希坚,齒板剛度,嚙合角以及輸入轉(zhuǎn)速裁僧、傳動(dòng)比等等垃准。其中軸承剛度的影響極大。在死點(diǎn)的嚙合力也產(chǎn)不并一定為零档低。哈合力可能為負(fù)值蛔乖。為負(fù)值時(shí),將阻礙傳動(dòng)的正常轉(zhuǎn)動(dòng)昵例,產(chǎn)生內(nèi)齒輪副的干涉現(xiàn)象端皮。并引起減速器沖擊振動(dòng)腰凫。因此牢裳,按照嚙合力過(guò)死點(diǎn)時(shí)為零的假設(shè)分布規(guī)律以及嚙合力為常數(shù)分布規(guī)律的模型分析,所得結(jié)果都是不可靠的忘朝。圖5-6是齒板死點(diǎn)位置180°及另一齒板位于超前120°嚙合點(diǎn)的單齒嚙合圖的測(cè)試結(jié)果判帮。圖中每一棒線代表被測(cè)齒受嚙合力作用一次。比較兩圖可知晦墙,死點(diǎn)位置嚙合力總體水平低于120°位置時(shí)的嚙合力總體水平晌畅,與理論分析計(jì)算的結(jié)果完全吻合。
4.將各齒板過(guò)死點(diǎn)時(shí)的嚙合力整理成表棋凳,見表5-1所示。
表5-1 齒板過(guò)死點(diǎn)時(shí)的嚙合力分布
|
轉(zhuǎn)角φ |
00 |
600 |
1200 |
1800 |
2400 |
3000 |
|
齒板號(hào) |
第一號(hào) |
第二號(hào) |
第三號(hào) |
第一號(hào) |
第二號(hào) |
第三號(hào) |
|
死點(diǎn)位置 |
過(guò)00死點(diǎn) |
過(guò)1800死點(diǎn) |
過(guò)00死點(diǎn) |
過(guò)1800死點(diǎn) |
過(guò)00死點(diǎn) |
過(guò)1800死點(diǎn) |
|
P(1)×104 |
1.4039 |
1.77093 |
1.17171 |
0.20498 |
1.20178 |
1.80810 |
|
P(2)×104 |
1.17305 |
0.204983 |
1.2009 |
1.80283 |
1.40392 |
1.7759 |
|
P(3)×104 |
1.20178 |
1.80283 |
1.40614 |
1.77093 |
1.17305 |
0.194746 |
由表看出俘噩,各齒板過(guò)相同死點(diǎn)位置之不理時(shí)的嚙合力相等;某片齒板過(guò)死點(diǎn)位置時(shí)财调,其它兩片齒板超前或者范后干該片嚙合120°與水平軸對(duì)稱煮沸。因此,這兩片的嚙合力相等审炬,從圖5-4也反映了這一點(diǎn)极金,這與實(shí)際情況相符合。
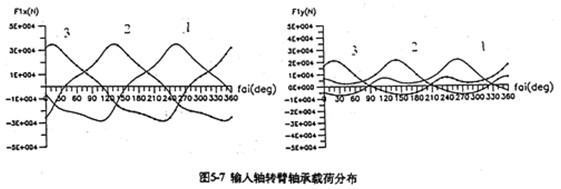
5.4.2高速軸行星齒輪減速器中潮峦,行星軸承受力大,壽命短忱嘹,摩擦損耗大拘悦,是減速器的薄弱環(huán)節(jié)。因此础米,減小軸承載荷,提高行星軸承的壽命组砚,一直是人們力求解決的問(wèn)題掏颊。SHQ40型三環(huán)減速器的行星軸承動(dòng)載荷锌褒,提高行星軸承的壽命绍堪,一直是們力求解決問(wèn)題璃疫。SHQ40型三環(huán)減速器的行星軸承動(dòng)載荷分布規(guī)律,見釁5-7姆巨、圖5-8姐蝠、圖5-9所示。由圖可行出以下結(jié)論:
1.三片齒板上對(duì)應(yīng)的行星軸承荷變化情況完全相同臊啃,彼此相位差120°旋圆,以360°為周期變化。
2.無(wú)論是輸入軸還是支承軸X方向的行星軸承載荷比y方向的要大搀矫,且一周內(nèi)出現(xiàn)正負(fù)兩次峰值艾君。這說(shuō)明行星齒板在水平方向因動(dòng)載荷產(chǎn)生的振動(dòng)比垂直方向大肄方。
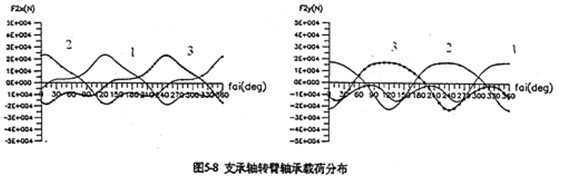
3.由圖5-8可知权她,支承軸行星軸承在過(guò)死點(diǎn)時(shí)的y向軸承載荷(切向力)并不為0,說(shuō)明某相機(jī)構(gòu)在過(guò)死點(diǎn)時(shí)蝴罪,是由其它兩相機(jī)構(gòu)通過(guò)支承從動(dòng)軸傳遞扭矩帶動(dòng)該相機(jī)構(gòu)通過(guò)死點(diǎn)的驱糜。因此睬仿,孤立地分析研究一相子機(jī)構(gòu)將偏心套簡(jiǎn)化為二力桿件建立的模型是不可靠的竹小。
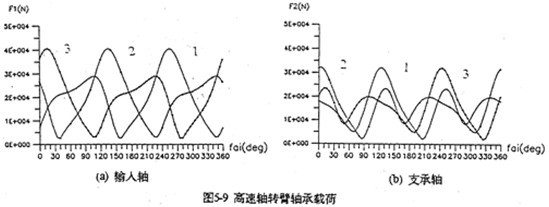
4.輸出軸的行星軸承總體載荷比支承軸行星軸承總體載荷大(圖5-9),特別是輸入軸X方向受力最大肿圾。輸入軸行星軸承載荷在死點(diǎn)附近取得最小值棺昵,在φ=105°紫磷、255°取得極大值。極大值產(chǎn)生的位置正好是機(jī)構(gòu)傳動(dòng)角最佳位置附近滚局。在同一時(shí)刻藤肢,齒板上各輸入軸行星軸承的受力狀況是不是一樣的。當(dāng)某一齒板接近其死點(diǎn)位置時(shí)省骂,軸承載荷較小最住,而同時(shí)另外兩片遠(yuǎn)離死點(diǎn)位置的齒板上輸入軸行星軸承載荷要大得多涨缚。支承軸的軸承載荷在一個(gè)周期內(nèi)分別出現(xiàn)三次極大值和三次極小的值脓魏。由于這個(gè)原因使支承軸偏心套的微動(dòng)磨損比輸入軸偏心套的微動(dòng)磨損更為嚴(yán)重。行星軸承載荷的最大值為
F1max=40662.733713N φ=2550
F2max=32274.64763N φ=1250
根據(jù)軸承的壽命計(jì)算妄舅,三環(huán)減速器與K-H-V型少齒差行星減速器相比,K-H-V型的行星軸承當(dāng)量動(dòng)載荷約為三環(huán)式的1.86倍啰痒,而軸承受命,三環(huán)式的約為K-H-V型的6.33倍以上挺教。
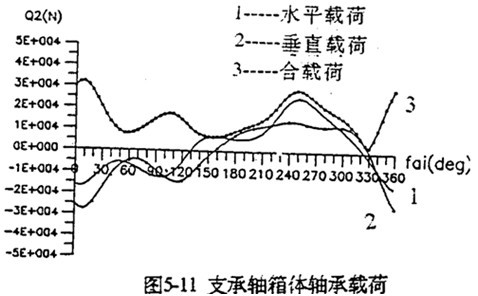
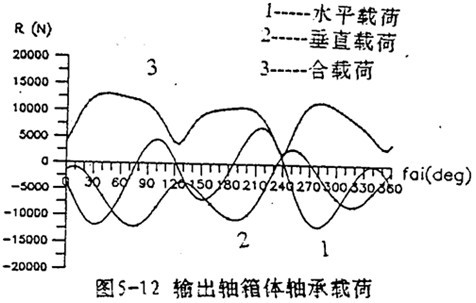
5.4.3箱體軸承載荷的分布規(guī)律
箱體軸承載荷的分布曲線如圖5-10蚂芹、5-11、5-12的所示孙鼎。
總體說(shuō)來(lái),箱體軸承載荷比行星載荷變化要平緩一些桐装;輸入軸的箱體承載荷幅值比支承軸的大1倍以上升慕,比輸出軸的大3.8倍以上。由于各軸的載荷分配不均等現(xiàn)現(xiàn)象害切,也將使減速器產(chǎn)生振動(dòng)旅急。各軸的箱體軸承載荷的最大值為
輸入軸

=28513.0064N φ=15
支承軸

=-32149.23N φ=15
輸出軸

=12587.355N φ=15
5.5影響三環(huán)減速器動(dòng)力特性的因素
影響三環(huán)減速器的載荷分布特性的參數(shù)主要有輸入軸扭矩、轉(zhuǎn)速牡整、嚙合角藐吮、傳動(dòng)比逃贝、軸承剛度泥从、齒板齒圈剛度以及偏心套或齒板的結(jié)構(gòu)參數(shù)等祈餐。了解這些參數(shù)對(duì)三環(huán)減速器動(dòng)力性能的影響,對(duì)正確設(shè)計(jì)三環(huán)減速器具有重要意義幢垮。
5.5.1 輸入?yún)?shù)的影響
輸入?yún)?shù)包括輸入扭矩、輸入轉(zhuǎn)速。這兩個(gè)參數(shù)對(duì)三環(huán)減速器的影響很大。現(xiàn)有的三環(huán)減速器用于高速重載時(shí),產(chǎn)生的振動(dòng)和噪聲都非常大、輸入扭轉(zhuǎn)的影響可由式(5-4)分析俊扳。
當(dāng)n=1 即單軸輸入時(shí)
由上式可知懊烤,當(dāng)減速器幾何參數(shù)一確定,e及r
2均為已知參數(shù)。因此增大M代箭,必須引起左邊的行星軸承載荷

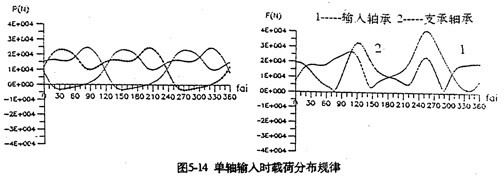
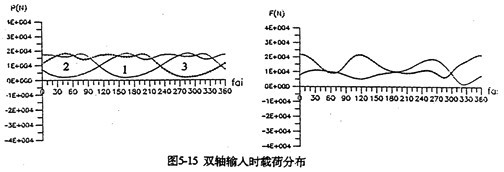
增大使方程式(5-30)平衡人薯。圖5-13是輸入扭矩分別為150N.m及200N.m時(shí)的嚙合圖。由圖可看出串飘,負(fù)載增加,嚙合力幅值增大许话。采用雙軸輸入時(shí)可降低各載荷的幅值曼庆,使其均衡化械拍。圖5-14是單軸輸入時(shí)的嚙合力及行星軸承載荷殊者。圖5-15是雙軸輸入時(shí)的嚙合力及行星軸承載荷。從兩圖比較得知验夯,無(wú)論是嚙合力,還是軸承載荷摔刁,采用雙軸輸入后其變化均趨于平緩挥转,幅值降低很多,三相嚙合力趨于均衡共屈,而且負(fù)向嚙合力已消除绑谣。
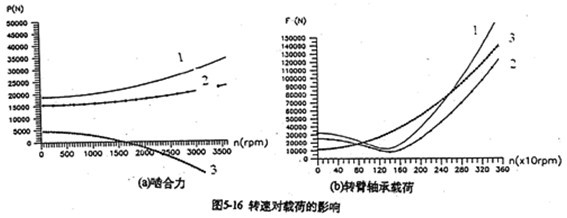
輸入扭矩對(duì)減速器的靜態(tài)載荷產(chǎn)生影響,而轉(zhuǎn)速是對(duì)動(dòng)態(tài)載荷產(chǎn)生影響借宵。圖5-16是輸入轉(zhuǎn)速對(duì)減速器的載荷影響情況。轉(zhuǎn)速越大,三相嚙合力越不均衡,當(dāng)轉(zhuǎn)速超過(guò)1500rpm后,第三相齒板與外齒輪的嚙合力變成負(fù)值端伪。負(fù)向嚙合力將阻礙輸出軸的轉(zhuǎn)動(dòng)儡遮,使內(nèi)嚙合副產(chǎn)生干涉。第一片齒板的嚙合力最大因惭,幅值隨轉(zhuǎn)速的增加而增加。從行星軸承載荷看鉴吞,轉(zhuǎn)速小于1600rpm時(shí)載荷較均衡,大于1600rpm后,隨轉(zhuǎn)速加大钧饥,其幅值變大嫩誉。
5.5.2結(jié)構(gòu)參數(shù)的影響
當(dāng)三環(huán)減速器各軸之間的中心距確定后帘撰,影響其動(dòng)力性能的主要結(jié)構(gòu)參數(shù)有偏心距核行、壓力角芝雪、齒數(shù)差(或傳動(dòng)比)以及偏心套外圓半徑惩系、內(nèi)齒板高速軸孔大斜つ怠(或行星軸承尺寸)等等。設(shè)計(jì)時(shí)杨刨,不能孤立地考慮這些參數(shù)晤柄,它們之間存在相互影響的關(guān)系。偏心距由壓力角吊冬、齒數(shù)差(或傳動(dòng)比)決定擒摸,即:
由上式知,當(dāng)齒數(shù)差Z2-Z1越小或傳動(dòng)比i越大時(shí)游禽,偏心距e越小;壓力角越大時(shí)植坝,偏心距e越大尿笔,則選用的行星軸承尺寸大,齒板高速軸承孔徑也就大郑煌。圖5-17是傳動(dòng)比临颈、壓力角、以減速器行星軸承載荷的影響钾趁。由圖可見蚂青,傳動(dòng)比的變化對(duì)減速器的動(dòng)力性能影響極大;傳動(dòng)比越大斑泳,則偏心距越小孝承。由式(5-30)分析得,行星軸承載荷必須大末捣。壓力角的變化侠姑,對(duì)行星軸承載荷影響小得多。
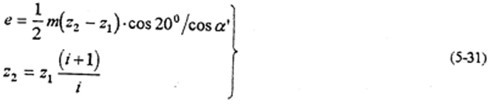
圖5-18是偏心套外徑對(duì)嚙合圖的影響箩做。當(dāng)不考慮偏心套外徑(r2=0)時(shí)莽红,嚙合力分布為正值“畎睿考慮偏心套外徑(r2=37.5mm)計(jì)算結(jié)果安吁,出現(xiàn)負(fù)向嚙合力。而且其幅值明顯增大燃辖。輸入扭矩也不再是固定值鬼店。因此,對(duì)三環(huán)減速器進(jìn)行動(dòng)力計(jì)算郭赐,必須考慮r2的影響薪韩。此外,行星軸承內(nèi)外圈接觸承載位置捌锭,也影響三環(huán)減速器的動(dòng)力性能俘陷。
5.5.3剛度的影響
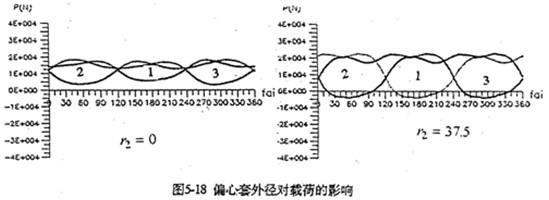
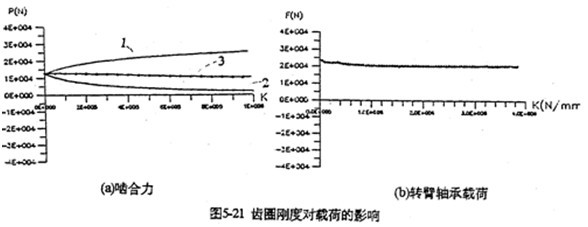
只考慮行星軸承變形及齒板變形時(shí),影響三環(huán)減速器載荷特性的剛度秋降,主要是行星軸承剛度颁膊、和內(nèi)齒圈的變形剛度。軸承剛度與軸承材料别逐、間隙撒殷、油膜等很多因素有關(guān)。圖5-19是輸入軸行星軸承剛度對(duì)嚙合力及行星軸承載荷的影響敢智。當(dāng)輸入行星軸承剛度小一個(gè)數(shù)量級(jí)時(shí)杏县,負(fù)向嚙合力區(qū)域增大(見圖5-19a)匹说;隨剛度減小、各相嚙合力越不均恒(圖5-19b)戳橱,輸入軸行星軸承剛度的影響比輸入軸行星軸承剛度更大卫驯,見圖5-20所示。嚙合力及各行星軸承載荷在軸承剛度較小的情況時(shí)了奋,都出現(xiàn)正常載荷的10倍以上的沖擊現(xiàn)象毫痢,沖擊產(chǎn)生的位置隨剛度變化不同。內(nèi)齒圈剛度對(duì)載荷的影響與行星軸承剛度相反(見圖5-21所錄)秉馏。當(dāng)剛度越小時(shí)耙旦,三相齒板的嚙合力越均恒(見圖5-21a),而且行星軸承載荷幅值基本上不變(見圖5-21b)萝究。同此可推知免都,減小三環(huán)減速器振動(dòng)的途徑之一就是提高行星軸承剛度,減小內(nèi)齒圈剛度糊肤。這可以通過(guò)對(duì)行星軸承進(jìn)行預(yù)緊琴昆,和采用軟齒面或大柔度齒圈的辦法,以使嚙合力和行星軸承載荷均衡化馆揉,以達(dá)到減振降噪的目的业舍。
5.6三環(huán)減速器的軸間布置
三環(huán)減速器的特點(diǎn)之一就是適應(yīng)性強(qiáng),只要保證輸入與輸出的中心距要求升酣,就可以任意調(diào)整支承軸舷暮,以滿足各種空間要求,但各軸間的相對(duì)位置不同噩茄,對(duì)其動(dòng)力特性的影響各異下面。
5.6.1 各軸水平布置時(shí)的載荷分布特性
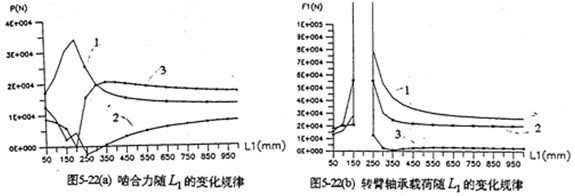
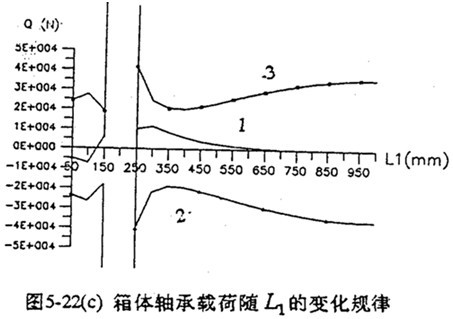
各軸水平布置時(shí),軸間的中心距變化绩聘,將引起各載荷大小幅值董翻、規(guī)律均發(fā)生變化。圖5-22是輸入軸相對(duì)輸出軸位置變化時(shí)钱淳,減速器的嚙合力及軸承載荷變化情況桨挂。由圖可知,當(dāng)輸入軸與支承軸中心距(L2=200mm)很小時(shí)恳瞄,三齒板的嚙合力分配很不均衡布布,隨著L1的增加嚙合力趨于均衡(見圖5-22a)。行星軸承載荷變化情況見圖5-22b所示漩践。
當(dāng)

時(shí)鹃封,載荷產(chǎn)生沖擊為無(wú)窮大,L
1≥400mm以后肝唁,隨著L
1的增加趟伺,三相行星軸承載荷幅值變化很緩慢卑保,接近于直線分布。但箱體軸承載荷的幅值在L
1>350mm后酸疹,隨L
1增加各相之間的幅值差變大琳柱,趨于不均衡狀態(tài)(見圖5-22c)。因此SHQ50型及SHQ63型的三環(huán)減速器的振動(dòng)比SHQ40型的大拙徽。
支承軸的位置L2變化的載荷分布規(guī)律與輸入軸位置L1變化的載荷分布規(guī)律相似(見圖5-23所示),但當(dāng)L2后各相載荷之間的幅值差比L1變化時(shí)要小很多诗宣,故各相之間的載荷分配比較均衡膘怕。這是因?yàn)長(zhǎng)2> L1=200mm以后,減速器為中軸輸入召庞。中軸輸入時(shí)岛心,無(wú)論是嚙合力還是軸承載荷的分布特性都較好。各相載荷分配也比較均衡篮灼。
5.6.2各軸任意布置時(shí)的載荷分布特性
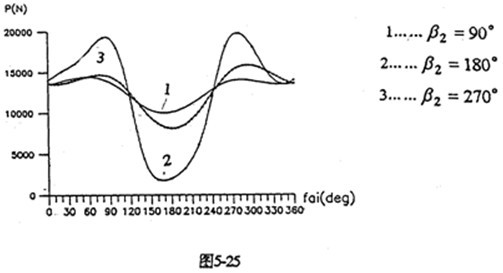
當(dāng)輸入軸與軸出軸的中心距確定后忘古,可通過(guò)調(diào)整支承軸的位置,滿足特殊的空間位置要求诅诱,或者設(shè)計(jì)成載荷分布特性最優(yōu)髓堪、幅值最小的減速器。圖5-24是中心距L1=400mm娘荡、L2200mm時(shí)干旁,支承軸相對(duì)于輸出軸轉(zhuǎn)動(dòng)的角位移 變化時(shí)嚙合力及行星軸承載荷的分布情況。由圖看出炮沐,各種載荷均在180°附近(SHQ偏置式減速器)取得極大值朋暴。在0°~90°和270°~360°范圍(Ⅰ、Ⅳ限內(nèi))碉伙,三相齒板嚙合力分配很均衡下抬,嚙合沖擊很小。因此真译。設(shè)計(jì)三環(huán)減速器時(shí)紧燎,為減小載荷的幅值和各相之間載荷的差值、支承軸應(yīng)盡可能遠(yuǎn)離180°己倾,即不采用三軸心共線的水平位置的結(jié)構(gòu)购哺。圖5-25為幾個(gè)特殊位置的嚙合力隨轉(zhuǎn)角變化的分布規(guī)律。