1.1 ���X�����ǂ��ӵİl(f��)չ�������c(di��n)
���X�������X݆���������ǂ����е�һ�N����������һ�����X݆�cһ����(n��i)�X݆�M��һ����(n��i)����݆�Ӹ����棬��(n��i)���X݆���X��(sh��)����С���ʺ��Q�����X����ӡ����X����ӵ���ͺܶ࣬������������[���݆�����X݆����ԭ���䷻����ʮ��������ձ��_ʼ�������a(ch��n)�@�N���ӣ����ڮ�(d��ng)�r��ˇ�l�������ӡ���X�μӹ����Ⱥܵ���ĭ������a(ch��n)�����ߣ�ֱ����ʮ����[��ĥ�c�ij��F(xi��n)���䣬�Ĺ�ˇ�ϱ��C�˔[���X�εľ������Ŵ��M(j��n)���@�N���ӵİl(f��)չ���[���݆���������X������Б�(y��ng)����V���������������һ�N���÷�飬�ڴ˻��A(ch��)��߀�l(f��)չ�˶��X����Ӱ�������(f��)���X�ΰ����������S���cƫ���ϲ����½Y(ji��)��(g��u)���[���݆���ӳ��d�������������\(y��n)�D(zhu��n)ƽ��(w��n)ˡ�£�Ч�ʸߣ������L��ֽ�����ӹ�����Ҫ������֣��Y(ji��)��(g��u)��(f��)�s��
�u�_�����X����ӵ�ԭ���c�[�����X����ӻ�����ͬ������^(q��)�e���ڃ�(n��i)���X݆���X���������Ýu�_�����꣬��݆�X�Y(ji��)��(g��u)���Ρ����Ͻ��|��(y��ng)��С��ǣ����d���������������Բ���ܛ�X�棬�ӹ�Ҳ���ö���߶������������ڮ�(d��ng)��(n��i)���ϵ�һ���u�߾��X݆�X��(sh��)���С�r���ͣ��O�a(ch��n)�����N���棬���O(sh��)Ӌ(j��)�^�����x���X݆�΅���(sh��)��Ӌ(j��)��ʮ�֏�(f��)�s��������1949����ϣ��K(li��n)�W(xu��)�߾͏���Փ�Ͻ�Q�ˌ�(sh��)�F(xi��n)һ�X����ӵĎ�Ӌ(j��)�㆖�}����ֱ����ʮ����Ժ���̣��S�����Ӌ(j��)��C(j��)���ռ��\(y��n)���������u�_�����X����Ӳŵõ����^��Ѹ�ٵİl(f��)չ��Ŀǰ�����Nʽ���������X��Ŧ�ܡ�ʮ�ֻ��K�����ӱP�ȶ�N��ʽ���ơ�
�u�_�����X����ӵ����c(di��n)���X݆����ͨ�ĝu�_���X݆���ߺ��X݆�C(j��)���Ϳ����M(j��n)�мӹ����ģ�����Ҫ����ĵ����c�����O(sh��)�䣬����Ҳ�ɲ�����ͨ�X݆����������˼ӹ����㳽�ߡ�����ɱ��^�͡��������Ч�ʲ���[�����X����Ӹ�Խ�͡�
����ʮ���������������_ʼ̽ӑ�A�����X����ӣ�����ʮ�������ٶ����ձ����_ʼǬ�؈A�����X�����ǜp������ϵ�л����a(ch��n)��Ϊ���@�N���ӵ����c(di��n)��������݆���X���������A�������˔[����݆�X�c��X�ڇ����c(di��n)�����ʷ�����ͬ���ᣬ�γɃɰ��A���ă�(n��i)�������ƣ��Ķ������݆�X�Ľ��|��(qi��ng)�Ⱥ͇���Ч�ʣ�����X�����X���꣬�����ð����X�Y(ji��)��(g��u)�������������׃����(qi��ng)���ֺ�������X�Y(ji��)��(g��u)������ѡ�룬�A����݆�X�ļӹ��o�茣�ÙC(j��)������������Ҳ�ױ��C���������䷽�����顣�@�N����Ŀǰ�ڇ���(n��i)Ҳ�����Ʋ�����
����ʮ����������^���F(xi��n)��һЩ�µ����X�������ʽ�ڻӣ����аl(f��)չ�^����л��X���X������������F�X���X����ӣ��p����ݔ��ʽ���X��������ͣ��Լ����Ï���׃����f�\(y��n)�ӵ��C�����Ӱ��⡣��(sh��)�`�������ţ����X������c�m�ù��r��ͬ�������C(j��)е������ʽ����^�������S���@����(y��u)�c(di��n)���w�eС���⡢�����p������Y(ji��)��(g��u)�o�������ӱȷ�������Ч�ʸߵ���ɽ��
����(n��i)���������_ʼ�������X������о��ġ�1958���_ʼ���Ɣ[���݆�p������հ����ʮ���Ͷ�빤�I(y��)�����a(ch��n)���ɣ�Ŀǰ���γ�ϵ�У��ƶ�������(y��ng)�ı���(zh��n)���١����V�����ڸ�C(j��)е�O(sh��)����բ����1960���Ƴɵ�һ�_���X��u�_�������X݆�p����������ӱ�37.5���ᣬ���ʞ�16KW�߲棬���ژ�ʽ�ؙC(j��)�������C(j��)��(g��u)�С�1956���҇������ęC(j��)е�W(xu��)���쾰�����ڸ���(j��)�p�����C(j��)��(g��u)��ԭ�������һ�N�������X����әC(j��)��(g��u)��ȵ�������c(di��n)�Ǯ�(d��ng)ݔ���S���D(zhu��n)�r��γ������݆�������[���\(y��n)�ӣ����ٹ��D(zhu��n)�c�������D(zhu��n)�ĺϳɣ�������ͨ�^�p�����C(j��)��(g��u)��(d��o)�����A��ƽ�����Ρ��@�N��(d��)�صġ��p����ݔ�����X����әC(j��)��(g��u)���õ���(d��ng)�r����(n��i)��ͬ�еĸ߶�ƽ�r����1963��δ����������̫ԭ���W(xu��)Ժ�W(xu��)���ϰl(f��)���ˡ��X��(sh��)��Zd=1�ĝu�_��K-H-V�������X݆�p���������O(sh��)Ӌ(j��)��һ�ģ�Ԕ��(x��)�U���˝u�_�����X����ӵ�ԭ�����O(sh��)Ӌ(j��)�������ȡ��������µ��@Щ��(chu��ng)���Թ�����Ծ�������X�������X݆�������Ҕزݳ����ƏV��(y��ng)��������Ҫ��ָ��(d��o)���á��p����ݔ�����X����ӵă�(y��u)�c(di��n)����ʹ�����S�е��d���½�Ʃ�Σ����Ү�(d��ng)��(n��i)�X����������݆�r�ܹ��������S�еď���ߴ�ɲ�������Ͼ�����Ķ�����������S�еĉ���ݺ�䡣���⣬�@�N���Ӳ���Ҫݔ���C(j��)��(g��u)������߀�Ɍ�(sh��)�F(xi��n)ƽ���S���ӴӲ����Y(ji��)��(g��u)���Σ�Ч�ʸ߳�ĺ���m���ԏ�(qi��ng)���Ρ����ǣ����ښvʷԭ�����ã��p����ݔ��ʽ���X�����һֱ�]�еõ���(y��ng)�õİl(f��)չ��٣�ֱ����ʮ�����u���˂�����ҕ��̡�1985�꣬ұ�I(y��)���ؑc��F�O(sh��)Ӌ(j��)Ժ���Դ�����̎������ƽ���Sʽ���X���(n��i)�X�����X݆���ӡ������h(hu��n)�p�����ŷ���ͬ���ԡ����h(hu��n)ʽ�p�٣������٣������b�á���Ո�ˇ��Ұl(f��)��������̣��Ӣ����1989��Ҳ���F(xi��n)����Ƶ����X������b�á����Ǿ��������@�Nԭ���O(sh��)Ӌ(j��)�����Ĝp������û��һ�����S��Ҫ������Ƭ��(n��i)�X�壬���ò��Ƴ�ƫ���Y(ji��)��(g��u)��ɮ���Y(ji��)��(g��u)��(f��)�s���ͣ��ӹ��ֶȾ���Ҫ��ߣ������ڹ����^���ж��ã�ƫ�����ܽ�׃Ť�ص����ý籱�����c���S(li��n)�Y(ji��)�ı���a(ch��n)����ĥ�p����(d��o)�°l(f��)����裻����������������120����λ����p�����C(j��)��(g��u)֮�g���ڶ���^�s�������ڼӹ����b���`������(d��o)�¸��ӛ_���d��������������Ӻ���������1987�꣬�ݿ���Soulek��Josef���һ�K�X���ϲ������������S�ă�(n��i)�X���ǂ���ܽҴ������Ո�ˌ����ʹ̡���������ĽY(ji��)��(g��u)�������ڹ�ˇ�Ժܲ�����܌�(sh��)�á�1993���ؑc��W(xu��)��ʿ�о����߽������һ�N�����S�Nʽ���X�������X݆�������䣬�������M(j��n)������Փ�������档
1.2 �B�U�����X݆����
�S�����X����ӑ�(y��ng)������V��������(n��i)��W(xu��)�����X�η������ʡ��Y(ji��)��(g��u)��(y��u)�����롢���|�������Y(ji��)��(g��u)��(qi��ng)��ޱ֥���ӑB(t��i)�����������Ч�ʡ��\(y��n)�Ӿ��ȵȷ����M(j��n)���˴������о�������ȡ�����S���Ѓrֵ�ijɹ����ԣ����ɹ����_�l(f��)�����������X�����ǂ�����ʽ��Ŀǰˣ�֣��҇������о���ˬ�����a(ch��n)�ܟ��T��һ�N�B�U�����X݆���ӡ���ƽ���Sʽ���X���(n��i)�X�����X��ݔ�����ӡ�ԓ��������B�U��(n��i)�X݆���X݆���������X݆�����������p����ݔ�븶�̣���Ԫݔ���C(j��)��(g��u)���ȡ���Ҫ��һ�X�h(hu��n)��һƬ�B�U�����X�壩=�����X�h(hu��n)����Ƭ�B�U�����X�壩�ٲࡢ���h(hu��n)����Ƭ�B�U�����X�壩���ĭh(hu��n)����Ƭ�����X�壩�ȽY(ji��)��(g��u)��ʽ�Ĝp�����������D1-1�����h(hu��n)�p�����Ļ����Y(ji��)��(g��u)������ԭ�����D���ɸ�����ƽ���Ҹ���������ƫ���S�i����ƫ���ף��ĸ����S2���࣬����ͨ�^������һ�S����Sͬ�rݔ��б�أ���Ƭ�B�U�����X�壨��(n��i)�X݆��1ͨ�^�S���b�ڸ����S�ϣ����X݆3���S������S���ף����S���c�����S2�S��ƽ�еʷ����ߡ������S��ͨ�^�S��֧���ڙC(j��)�w�Ͽ�������Ƭ�X��1�c���X݆3���ϻ��������ϵ�˲�r��λ���120��ǡ�
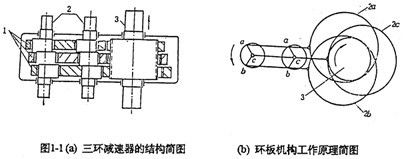
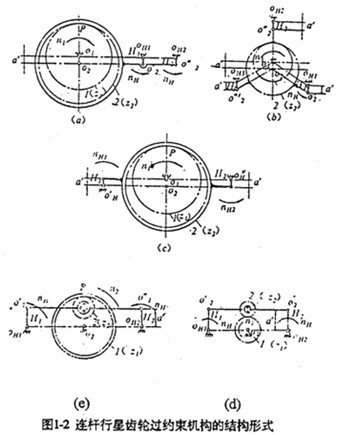
�B�U�����X݆���әC(j��)��(g��u)߀����D1-2��ʾ�ĸ��N��ʽΣϾ���D1-1�͈D1-2��a���������b������d�����桢��e������ƽ����߅�ΙC(j��)��(g��u)�Ծ����D1-2��e���鷴ƽ����߅�ΙC(j��)��(g��u)�����ЈD1-2��d�����⡢��e�����B�U�����X݆�����X݆���룬��������(n��i)�X݆��
�����B�U�����X݆���ӵ�ݔ��C(j��)��(g��u)��ƽ����߅���p�����C(j��)��(g��u)·�ģ��ʴ��ڡ����c(di��n)�����}����������(d��ng)�����c�B�U�����X�����ľ������r���C(j��)��(g��u)̎���\(y��n)�Ӳ��_��λ������������ӽǞ������C(j��)��(g��u)�o���\(y��n)�ӡ���˿���Ŀǰ����(n��i)���P(gu��n)���p����ݔ��ʽ�B�U�����X݆���ӵ��о���ʦ�����c(di��n)������ο˷��p����(g��u)�C(j��)��(g��u)�ġ����c(di��n)���ķ�������Ҫ�����N��Ȼ��
1��å���ö��ಢ���p�����C(j��)��(g��u)�˷������c(di��n)��
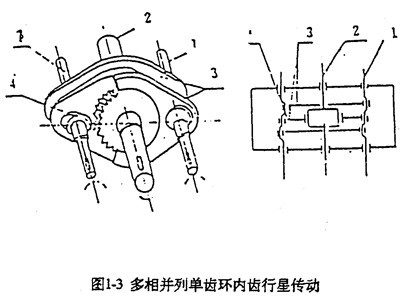
�����p�����C(j��)��(g��u)���������D(zhu��n)һ��Ҫ��(j��ng)�^���Q�ăɂ������c(di��n)��λ����ѭ�����Բ��Ã��ࣨ�ף����ϵIJ����p�����C(j��)��(g��u)�Կ˷������c(di��n)���IJ��_����ǿ���������h(hu��n)�p������Ҋ�D1-1������������λ���120�������ƽ���p�����C(j��)��(g��u)�M�ɵ����ಢ���p�����C(j��)��(g��u)��ѡ���(d��ng)ijһ���p�����C(j��)��(g��u)λ�ڡ����c(di��n)��λ�Õr������������p�����C(j��)��(g��u)ͨ�^֧�и����S���fŤ���Ƅ���Խ�^�����c(di��n)��λ����й���@�N�Y(ji��)��(g��u)��ȱ�c(di��n)���S��ߴ�����g�X�尲�b���^���y�ⶸ����횲���ƫ������ʽ���������S�ϵ��I�۷ֶȾ���Ҫ��ߡ�����ݩԾ����Ƭ�����X݆���Σ��\(y��n)�D(zhu��n)�^�������׳��F(xi��n)�d�ɷ��䲻���ĬF(xi��n)�����@�Nԭ���˷������c(di��n)�����B�U�����X݆����߀�І��X�h(hu��n)��Ҋ�D1-3���Ȝp������¶��
2���ǡ����p����ݔ�루�p�Sݔ�룩�˷������c(di��n)��
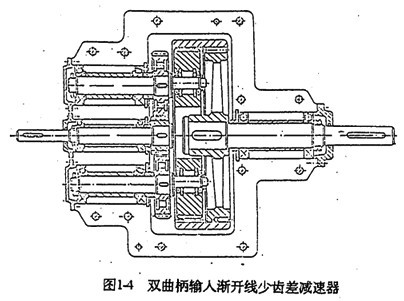
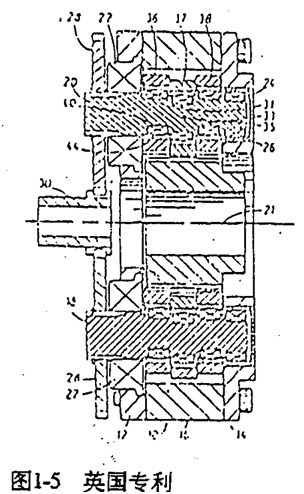
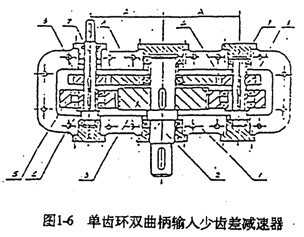
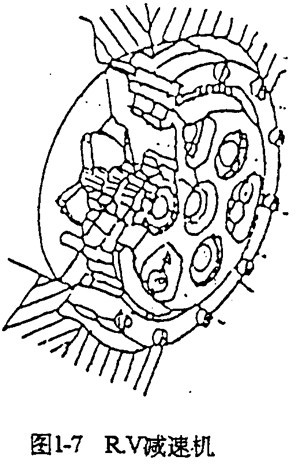
�p�����C(j��)��(g��u)�У�����ڃɸ����S�϶��Є���ݔ���������t�����c(di��n)��λ��Ҳ����Ȼ�������˷�����ˣ�����ͨ�^һ���S���әC(j��)��(g��u)�ф�����һݔ������S���f����һ�����Sɼ�裬�Ķ��˷��C(j��)��(g��u)�����c(di��n)�����֡�����(j��)�@�Nԭ���Ƴɵ��p����ݔ�����X�������X݆�b��֮��������ͺܶ࣬��̫ԭ���W(xu��)Ժ��ʮ������Ƶ��p����ݔ��u�_�����X��p������Ҋ�D1-4��������Ӣ��������Ҋ�D1-5�����ޡ����ؑc��F��˾���ƵĆ��X�h(hu��n)�p����ݔ�����X��p������Ҋ�D1-6���������ձ��ɱ����ҵ������Ƶ�RV�p������Ҋ�D1-7�������������c(di��n)����ͨ�^�⇧���X݆����ݔ��������������f�����������S�����ۣ���ʽ���Sݔ��ϵæ���Ķ��˷������c(di��n)�����@�N�Y(ji��)��(g��u)�����c(di��n)������ӱȞ鶨�S���ӵĂ��ӱ��c���X�������X݆���ӵĂ��ӱ�֮�˷e�ݲ��������ͨ�^��׃�⇧���X݆���X��(sh��)���㺯�؝M�㲻ͬ���ӱȵ�Ҫ���������m��(y��ng)�ԏ�(qi��ng)���䲻��֮̎�ǽY(ji��)��(g��u)��(f��)�s��ǽ�������ڸ����S֮�g���ڃ�ƽ�Ђ��ӵĄ��Ԃ���朣����X݆���ϸ����p�����C(j��)��(g��u)�����`����^����Ӽ�裬�ӹ�����Ҫ��ܸߡ�
3�ȼࡢ�ö������C(j��)��(g��u)�˷������c(di��n)��
�@�N�˷������c(di��n)���ķ��������B�U�ϲ��Ãɂ����ϵ��������ң������������������D(zhu��n)���IJ��������@����ͬһƽ�����γɶ����p�����C(j��)��(g��u)��ռ����(d��ng)�B�U�����X���\(y��n)�ӵ�ijһ�����C(j��)��(g��u)�ġ����c(di��n)��λ�Õr֬�ۣ�������p�����C(j��)��(g��u)��̎�ڡ����c(di��n)��λ�ã����Ԃ��f�������\(y��n)�ӏĶ�ʹ�����X��Խ�^ԓ�c�á���Ҋ�Ŀ��Nʽ���X�������X݆�p�������Ǹ���(j��)�@һԭ���Ƴɵģ�Ҋ�D1-8���������ݿˌ������p���b�ã�Rductor�������������������S�C(j��)��(g��u)�������X�������X݆���ӵ�ݔ��C(j��)��(g��u)��ƫ�����������S��(g��u)��120�����ֲ���Ҋ�D1-9�����@�N�Y(ji��)��(g��u)�����c(di��n)�nj�(sh��)�F(xi��n)���X����Ӷ��o�����c(di��n)���ּ����������Ѓɂ����ϵ������Sĸ�ƣ��ӹ�����Ҫ��ߡ�������ţ��Y(ji��)��(g��u)���^��(f��)�s���������b��̫���㡣�߽�����ʿ������S�N�����X�������X݆����Һ�룬ͨ�^��ƫ���S�i���������ټ�һ����ɂ��N�S���ஔ(d��ng)�������S����(g��u)�ɵ��������C(j��)��(g��u)���˷������c(di��n)����Ҋ�D1-10����Ӱ�������c(di��n)�ǽY(ji��)��(g��u)���Σ��܌�(sh��)�F(xi��n)���X����ӿ�����
1.3 �n�}�����
���X���B�U�����X݆���ӿ˷���ͬ�Sʽ���X�����ǂ��ӵ������S��������������ء����C(j��)��Ӵ��д��������˂������Q���y�}���ƣ����нY(ji��)��(g��u)���Σ����ӱȴ�ݷң��w�eС�۱ʡ����p������Ч�ʸߵȃ�(y��u)�c(di��n)ǧ�������ڲ���ܛ�X��ĝu�_���X݆��(n��i)���Ͽ�ħ���ʽ��|���d���X����(sh��)�࣬���Ѓ�(y��u)���г��d���^�d������̵�������X݆���a(ch��n)�ɱ���Ӳ�X����r������ӹ�����Ҫ��͡���˴��������X���B�U�����X݆���ӱ��^�m���҇�Ŀǰ�Ľ�(j��ng)��(j��)�l(f��)չˮƽ����e�����h(hu��n)�p�������l(f��)չ�ٶȷdz�����췸�������_ʼ�������a(ch��n)�������О�ұ�I(y��)�����C��(bi��o)��(zh��n)������Ҳ�LJ��Һ��ؑc�����c(di��n)�(xi��ng)Ŀ֮һ���ࡣԓ�p���������ڸ��I(y��)���T�V����(y��ng)�ã���Ȼ��������Ľ�(j��ng)��(j��)Ч����м���������������H����r�g���壬���O(sh��)Ӌ(j��)�����a(ch��n)�͑�(y��ng)���^���д������S�����}��
1���С�ȱ��ȫ�����Փ�����͌�(sh��)�(y��n)�о�
Ŀǰ���꣬�����h(hu��n)�p�����ĽY(ji��)��(g��u)ԭ���\(y��n)�ӌW(xu��)����åԸ�������W(xu��)�����̵ʡ����Ϗ�(qi��ng)�ȡ��ӑB(t��i)���ܺ����������������칤ˇ����(y��ng)�����c(di��n)�ȷ�����ſ����ĩ�_չ�^ȫ��ģ�ϵ�y(t��ng)����Փ�͌�(sh��)�(y��n)�о���ճ��ʹ�O(sh��)Ӌ(j��)����ȱ������(j��)��Ѵ��ֻ������O(sh��)Ӌ(j��)������ڶ��ִ��Ե�ģ���M(j��n)������Ӌ(j��)�㣬ʹ�Üp�������ܲ���(w��n)����̴��������K��ԓ�a(ch��n)Ʒ���ƏV��(y��ng)��é�̡�
2�´ˡ��ӹ������b�{(di��o)��Ҫ���
�����h(hu��n)�p����ԭ���Ϸ�����֪���ţ�һ�����S��Ҫ���b��Ƭ���X�ĭh(hu��n)�壬���ò��Ƴ�ƫ���Y(ji��)��(g��u)�緶�������K�h(hu��n)���횻���120���������ӹ�����Ҫ��ߣ����Ќ��I(y��)���g(sh��)�ˆT���b���{(di��o)����������t���������ڼӹ��`�ʹ��Ƭ�h(hu��n)��a(ch��n)�����������������ƿ�ѡ��_����졢���ȣ��@�ӄݱ����Ӽӹ��ɱ����ǡ�
3���ڡ������^�����ӡ��_�����䡢���Ȇ��}
���h(hu��n)�p������ʹ���^���д������^���(y��n)�ص��������_���������}ů�飬�e�����d�б��ʡ�������r�¸���ͻ���������S�������w��֡����w�ͭh(hu��n)����_���d�ɕr�������ѵĬF(xi��n)����F(xi��n)���ꡣ
���n�}����������ڞ����X���B�U�����X݆���ӵĜp��������һ���^�����Ą����������ģ�͡����O(sh��)Ӌ(j��)Ӌ(j��)�����̡���(sh��)�(y��n)�о����h(hu��n)�p�����ȃ�(n��i)�X���ǂ����ṩ��Փ����(j��)������������ؑc�п�ί�Y���(xi��ng)Ŀ��Ҳ���ؑc��W(xu��)�C(j��)е���Ӈ������c(di��n)��(sh��)�(y��n)���_�Ż����(xi��ng)Ŀխ����
1.4Փ�ĵĹ�������
Փ�Č��B�U�����X݆�^�s���C(j��)��(g��u)��λ�ƅf(xi��)�{(di��o)ԭ���M(j��n)����ϵ�y(t��ng)�ĵ��ԡ�ȫ����о�����������g϶���ء��X���`���������X׃����(j��ng)���d�͏���׃���ڃ�(n��i)��λ�ƅf(xi��)�{(di��o)��(ji��)���l���������ˆ��X�h(hu��n)�����p�X�h(hu��n)���X�h(hu��n)�p������һ������l(f��)����ģ��ɢ�����eᘌ����h(hu��n)�p�����M(j��n)����Ԕ�M�Ąӄ�������������о����ó��ĽY(ji��)���c��(sh��)�y��r����һ���辻��
Փ�ĵ��о�������Ҫ�������ׂ����棺
��������^�s���C(j��)��(g��u)���o�����Δ�(sh��)Ӌ(j��)�㷽���͘�(g��u)�����ꡢ�M����λ�ƅf(xi��)�{(di��o)ԭ�������Դ˞���A(ch��)����m�����B�U�����X݆�����^�s���C(j��)��(g��u)��λ�ƅf(xi��)�{(di��o)ԭ����Ѱ�����w��(n��i)��Ҋ�ڶ�����̡�
��ᘌ����ƽ���Sʽ���X���(n��i)�X���ǂ��әC(j��)��(g��u)���M(j��n)����Ԕ�M�Ľ�ģ���ۡ�����ûж����⡣��Q�����h(hu��n)�p�����ȃ�(n��i)�X���ǂ��ӵ��o���������d�ɼ��䇧��������ՓӋ(j��)�㆖�}Լ�ơ����w��(n��i)��Ҋ�����¡�
����������Ԫ��Ԯؤ��ͨ�^�ӆ�λ�d��������Ӌ(j��)�������X�塢ƫ���Ș�(g��u)���ڸ���������λ�õ����w��ȼ�����έ�������w��(n��i)��Ҋ������Ǻ����
����������h(hu��n)�p�����ľ��_��������ģ�ͣ�����SHQ40�����h(hu��n)�p�����������ԣ��M(j��n)��ģ��������գ�������������Լ���Ӱ����أ����w����Ҋ��������Դ��
����������h(hu��n)�p������Ӆ���(sh��)��Ӌ(j��)�㹫ʽ·����Փ�c��(sh��)�(y��n)�ɷ��挦���h(hu��n)�p�����M(j��n)������������о����(y��n)�C����Փ�����_����ʻ������˽������h(hu��n)�p������ӵĸ��M(j��n)�O(sh��)Ӌ(j��)����������