ϵ�y(t��ng)֪�R�Ŀ��ƺ�����
����Ҿ�����Ч�������s���}���������ޣ���Ҫ���F(xi��n)�ڃɷ��棺һ�nj��Ҿ��д����Č��T֪�R�����nj��Ҿ����x��͑���֪�R����������������ӑՓ���LjA���X݆�p��������ϵ�y(t��ng)�OӋ��֪�R�Ŀ��ƺ��������Կж���
֪�R���x���^�̱��ķQ����Ʋ��ԣ����΄��ǿ��������^�̵Ĉ�(zh��)�к��x��������ʽ�ྶ��������ָ���������Ƴ��µ������YՓ�����^��Ź�ݡ������^����Ҫ��Q�Ć��}�ǣ��چ��}����ÿ����B(t��i)�£�����x��֪�R�������`��đ��þ��ߡ�������֪�R�������֪�R����A���ţ���һ�N����֪�R�������������ęC��C���F(xi��n)��������C�ܵѣ��nj���ϵ�y(t��ng)����һ���IJ������ߡ�
5.1��̖��ģʽƥ��
��̖����ʽƥ���DZ��^�ɂ���̖���_ʽ�����������˴��Ƿ����Ƶ��^�̣��M�ܮ�ǰ��ģʽƥ��ֻ�Ǐ���ʽ�ϙz��������京�x��ڣ��������ǘ���ģʽ�����������Ա�������C�ĺ��IJ��֡������f��ɣ���̖��ģʽƥ��������C���P朲���������
��̖����ʽƥ����һ�f�w�Y������(sh��)�^�̣�����Ҫ�������£�
����ȫƥ����ˣ�
���������c�ֽM��ƥ��߾裬
��׃��ƥ�䣻
���s��ƥ�䳿�ڣ�
�����Ɨl��ƥ�䱪����
��Ӌ��ֵƥ�䣬
���l������ƥ������⡣
����ƥ�䷽ʽ�����M���ˈA���X݆�p��������ϵ�y(t��ng)�OӋ����Ҫ���ۡ�
5.2 ���֪�R�Ŀ��ƺ�����
�����ڵ������н�B�ˈA���X݆�p��������ϵ�y(t��ng)�OӋ�Ŀ��֪�RԪ������(ji��)��B���֪�R�Ŀ��ƺ������^���������ӣ���֪�RԪ���x����ͨ�^���OӋ���΄��{��������֪�RԪ���F(xi��n)�������֪�R���\�к�������䣬ͨ�^���·�ʽ�M�и��š�
1.Ҏ(gu��)��ܣ�����Ҏ(gu��)���֪�RԪ����һ���Ƴ������ͣ����F(xi��n)���֪�R�Ĵ惦����
ȡֵ�����ָΡ��h������M�п��֪�R���\�к���ֵ�����@��Ҫ�����к���(sh��)��ɣ�
��1���溯��(sh��)FPUT����������Ҫ��֪�R����ָ���Ŀ�ܸ�Ť���������������£�
��FPUT��coefflcient��lubricate��K1
������6.2 12.0 21.0 29.0 45.0 60.0 75.0 100.0 150.0 190.0 225.0)
(0.82 0.83 0.85 0.88 0.91 0.93 0.96 1.00 1.05 1.09 1.12������
��K1ֵ����(sh��)��������coefficient��ܵ�lubricate��������Ԣ��
��2��ȡ����(sh��)FGET�����������o��ָ����܂����µ�������Ϣ����ԓ����o������o��Ϣ���ԣ�����(sh��)����HILֵ��ʽ��
(FGET��coefficient��lubricate��K1������K1��ֵ��
��3���h����(sh��)FREMOVE��ʲ��FDELETE��������Ҫ������FREMOVE�܉�h��ָ����ܵ��ض�������������FDELETE���ڄh��ָ���Ŀ�ܣ���
��FREMOVE��coefficient��lubricate��K1���h��K1�����ֵ������
��FREMOVE��coefficient��lubricate���h��lubricate�۵ĸ������;ߡ�
��REMOVE��coefficient���h��coefficient��ܡ�
2.׃�w��ܣ�׃�w����Ǟ����m��֪�R�ĸ��N��ͬ����������Ŀ��֪�RԪ���ˣ���ÿһ��׃�w���֪�RԪͨ������һ�����wʹ���������佨���̈́h���^�̲��Ì�ԭ�ӵĽ����ͽ��ԭ�ӵļs���ķ������F(xi��n)��׃�w���֪�RԪ���\�к�������ͨ��������֪�R�����c�������F(xi��n)�����ᡣ���紫�ã����֪�R����3-3�������Ă����棬�����քe��formula���氶�ޡ�condition����ŷơ��value���桢notice�����룬�˿��֪�R�������^�����£������w�����ں��������
���Ȝyԇ�l����condition�����汶ֿ�����l��������ֵ���t�M����ֵ�гǡ���c1����ֵ�����飺���x����X݆����ϵ�О�order1���B̼��æ�����ϵ�У����tc1=0.025���飻��t���棬c1=0.025��c2����ֵ�����ǣ����p�������Ӽ���(sh��)grade=1�tc2=3�������t��Ѧ��c2=5����
Ȼ�yԇ��ʽ��formula�����沢Ӌ����ֵʯ������Ӌ�㹫ʽdelta=c1*a+c2��ֵ�ҽ㡣
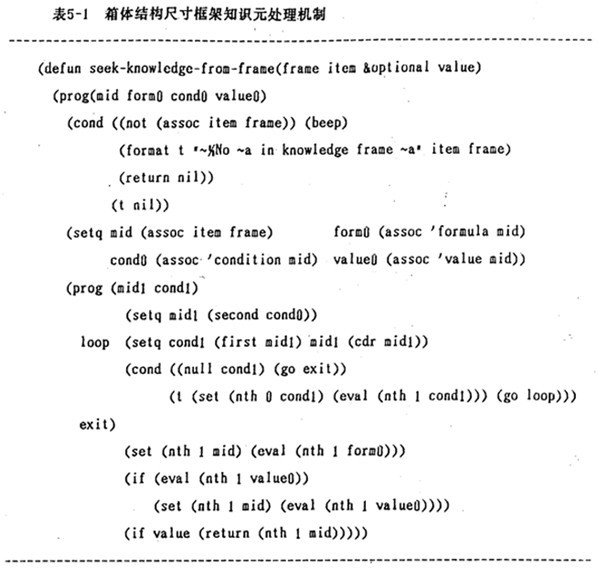
��yԇȡֵ�l����value������̭Ԣ����ȡֵ�����ƿ������t�z���Ӌ��ֵ�Ƿ�M��t���l�����猦deltaֵ�������л�����delta��8Ծ�֣��tȡdelta=8�������w֪�R����ֵ�^�̵�LISP����(sh��)���5-1��
����׃����֪�RԪ��̎��ë�ã�Փ���Ժ�߀����B���գ��@�ﲻ��һһ������
5.3�a��ʽҎ(gu��)�t�Ŀ����c����
�A���X݆�p�����OӋ����ϵ�y(t��ng)��һ�����A�ε��OӋ�^�̼��á���ͬ�OӋ�A�εĮa��ʽ֪�RԪ���ɈA���X݆�p�����OӋ����ϵ�y(t��ng)��Ҏ(gu��)�t����Ĭ����ͬ�OӋ�΄յĮa��ʽ֪�RԪ�Ŀ�����ͨ�^���ؿ���x���õġ�
���������Ǒ��îa��ʽ֪�RԪ�r��ʻ�����������Ĉ�(zh��)���^�̳ͼ������õ��������Ʋ�����������������������з�ݡ����������������ꡢԪ���Ʋ��Եȡ��������ƵĈA���X݆�p���������OӋϵ�y(t��ng)�о��룬���������ѡ���������������������٣��F(xi��n)�քe��B���£�
1.��������C���_�l(f��)
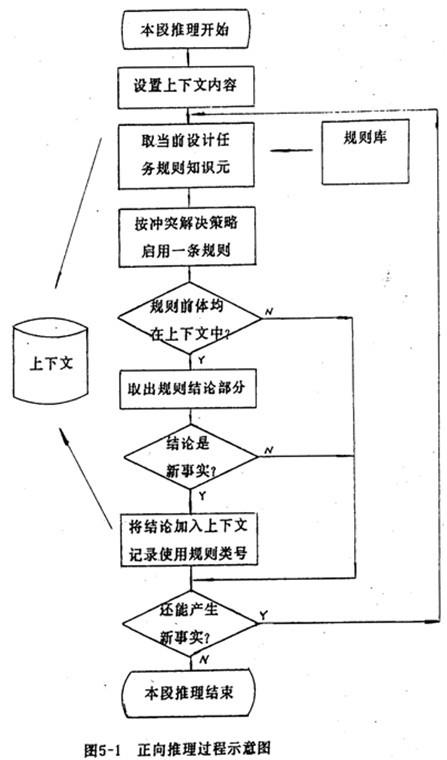
��������������ǰ��朿��Ʋ��ԣ�Ҳ�Q�锵(sh��)���ӿ��ƣ���ȿ���@�N���ƵĻ���˼���ǣ��Ć��}���е���Ϣ�������_ʼ������ʹ��Ҏ(gu��)�tʿ�ӣ���Ҏ(gu��)�t��ǰ�}��������ƥ��r߶�֣�ԓҎ(gu��)�t�������Ҏ(gu��)�t��Ȼ��ͨ�^�_ͻ����ʣ�ʣ��ڿ���Ҏ(gu��)�t���x��һ�l����Ҏ(gu��)�t���꣬����Ҏ(gu��)�t�YՓ��ʹ�����������ĵĸ�׃���Ķ������µ�Ҏ(gu��)�t��ƥ��ʿ�꣬��˵�ѭ�h(hu��n)����Ľ��ֱ�����_һ�����}��B(t��i)�]�п���Ҏ(gu��)�t���������Ҫ��Ľ��ֹ�����磬����Ҏ(gu��)�t�������^�̞飺
RULES==������
(rule lubrication-8
(if (there is no rule for lubrication))
��then(the lubricating method is bath lubrication)))
��
(rule lubrication-10
(if (the lobricating method is bath lubrication)
(gearbox is 2 grades transmission))
(then ( the depth of oil is 2-3 gear tooth height of
heigh speed gear)����
����
��ϵ�y(t��ng)���������Л]���܉��Ý�����ʽ��Ҏ(gu��)�t��Ԓ�Ͼ����tҎ(gu��)�t8 �����ã�Ĭ�JҎ(gu��)�t�����棬������YՓ���֣�the lubricating method is bath lubrication������ϵ�y(t��ng)�������ģ������������м������µ����ø�������C��Ҏ(gu��)�t���ٴ��M�б�vԶʣ����Y����Ҏ(gu��)�t10�����O�˕r�OӋ��speedged gear������ϵ�y(t��ng)�������к��ϣ��@�ӷ����M�й��ֱ���ٛ]���µ��������������О�ֹ��
��������ϵ�y(t��ng)�и��ɣ��Ñ���ݔ���c��ǰ���}���P����Ϣ���ӣ����ɮ�ǰ��(sh��)���죨�����ģ�������������ʾ��D��D5-l���С�
�A���X݆�p�������OӋ�^���㻭����һ���ɳ�ʼ�l�����OӋ�Y�����D׃�^�̡������ţ���A���X݆�p�����OӋ����ϵ�y(t��ng)��п�ƣ���������ǰ��朵��������Ʋ��ԡ����ă�(y��u)�c�ǣ��Ñ����������ṩ���P���}����Ϣ���ѣ������صȵ�ϵ�y(t��ng)Ҫ��r���ṩ��ϵ�y(t��ng)���Ժܿ�،��Ñ�ݔ���������푑����������䲻������֪�R�Ć����c��(zh��)���ƺ����oĿ�˲��ϵ�y(t��ng)����^���п���Ҫ��(zh��)���S���c��o�P�IJ��������������^�̵ĵ�Ч��Ӿ�ơ�
2.��������C���_�l(f��)
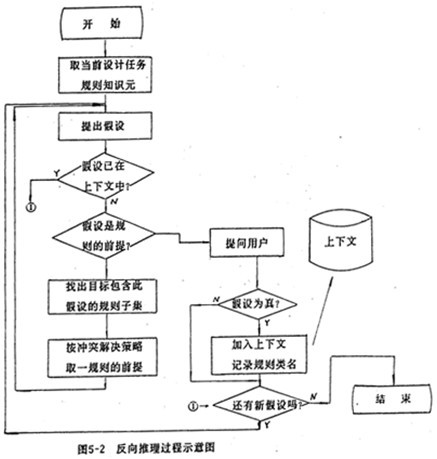
����������һ�N����朿��Ʋ��ԣ�Ҳ�Q��Ŀ���ӿ��ƣ��ް����@�N���ƵĻ���˼���ǣ��A�ȼ��Oһ��Ŀ�ˣ�Ȼ����֪�R�����ҳ���Щ��YՓ���ֿ��܌����@��Ŀ�˞����Ҏ(gu��)�t����ç���ٙz��Ҏ(gu��)�t����ÿ�lҎ(gu��)�t��ǰ�}���ֹ�Ѫ�����ij�lҎ(gu��)�t��ǰ�}�������еĸ��l������ͨ�^�Ñ��ĕ�Ԓ�õ��M�㣬�����ܱ��Ñ��ѽ��ṩ�������ĵ�����ƥ���ӹ����t��Ҏ(gu��)�t�ĽYՓ���֣���Ŀ�ˣ��ӵ���������ƿ�𣬏Ķ�ԓĿ�˱��C������t��Ҏ(gu��)�t�ėl���Ŀ�����µ���Ŀ�˾��ã��f�w��(zh��)�������^��ɽë��ֱ�������c���Pϵ����Ŀ�˵�ȫ���͡����Pϵ����Ŀ������һ�����F(xi��n)���������Еr��Ŀ�˱���ⴵ�ģ�����ֱ����Ŀ�˲����Mһ���ֽ���������IJ��܌��F(xi��n)�����M��r��棬�@���A�ȼ��O��Ŀ��ʧ����ϵ�y(t��ng)�˕r��Ҫ���¼��O�µ�Ŀ�ˡ�
Ŀ���ӿ���ֻ���]��Щ�����OĿ���ǿ��õ�Ҏ(gu��)�t���������C��һ�����OĿ��G�����Ը�������Ҏ(gu��)�t����G�ֽ���S����Ŀ�ˣ�ÿ����Ŀ���ֿ����Mһ���ֽ�ͥ�ɣ������F(xi��n)ij�lҎ(gu��)�t�ֽ��ȫ����Ŀ�˾����ѳ��F(xi��n)�ĸߌӴ�Ŀ�˕r�����������^�̱���M����ѭ�h(hu��n)�������^����Ҫ���@�N�z�y���顣
�c����������ƽ��磬������������Ҳ�����F(xi��n)����Ҏ(gu��)�t�ě_ͻ���↖�}���������������ȰѽYՓ��ͬ��Ҏ(gu��)�t������һ����ɣ�����һ���o����Ŀ�ˣ�����Ŀ�ˣ������һ�l���ϵ�Ҏ(gu��)�t��YՓ���־����_���@��Ŀ�˻���Ŀ�˕r�Ի�ͮa���˛_ͻ����Ŀ���ӵĺ����������������_ͻ���↖�}�@���y�ȸ�����߶������Ҫ��������x���Ҏ(gu��)�t�ͳɞ���Ŀ�˴��ʣ�Ҏ(gu��)�t���x�����Ŀ�˵��x��������
���������^��ʾ��DҊ�D5-2 ��
�A���X݆�p��������ϵ�y(t��ng)�OӋ�й�Ρ����������C���Ǿֲ�ʹ�õ��ձ�����ϵ�y(t��ng)�ڼ��OĿ�˵��xȡ�ϣ�
���xҎ(gu��)�t�ėl���Ŀ������OĿ���ж顣�@��Ҫ�ǻ�������Ŀ��]��
����ϵ�y(t��ng)�ڌ��Hʹ�������������OӋ�Č�����rǧ׃�f���ģ�������ϵ�y(t��ng)�S��֪�R��ه��һ��ij��R�Լ��O���͡��@Щ���O��ͨ����r���Ǻ������ű������Еr���m����������r������궳������ϵ�y(t��ng)��ijЩ��Ҫ�ĭh(hu��n)��(ji��)Ʈ�ߣ���ʹ����rҊ��6.2.2��
3.�������C�����_�l(f��)
�������ӑՓ�п��Կ���³ѹ�������ס��������������Ъ��Եă�(y��u)�c���ڵ����µ�ϵ�y(t��ng)ݔ�����҂���������Ӷ�ģ��A���X݆�p����ԭʼ��ݔ��l�������S������롣���ϣ�һ������؛��λ�ṩ���΄Օ���ְ�����ʼ�l���Dz����ľ��ѡ��@�rñ�ƣ����ڗl���IJ���䣬�H�Hʹ�����������y��ʹ�OӋ�M����ȥ̾�Ρ��A���X݆�p�����OӋ����ϵ�y(t��ng)������Ĭ�J�����ķ����������������û�������ķ����ճ�ۣ��Ͽ��Ʋ��ԵĻ���˼���ǣ��Y��ʹ�����������ͷ��������ĸ��ԃ�(y��u)�c��г����ͨ�^������������x���ʼĿ�ˣ�Ȼ��ͨ�^������������@��Ŀ�����������г�ʼĿ���x���äĿ����ͣ�Ҳ�˷�������������������äĿ�ԣ��Ķ��ɷN���������õ�����a�䶥ɡ����ţ������������㷨������Ԓ�����^�����£�
Procedure Alternate-chain��KB��ò��context��
repeat
Goals��Forward-dhain��KB�ʣ�context��
G��=Ghoose=Goal��Goals��
P��Backward-chain��G��KB��
until Pis ture
END
�@����������������ʽ���Ñ��ѽ��ṩ�Ĕ�(sh��)����Ϣ�������ģ��õ����ֽY�����ã��@���ֽY�����ܺ��з��������^�̵ĸ���Ŀ��������Choose-Goal�^�������@Щ���ֽY���Q����y��Ŀ�˵��x�����x��Ŀ�Ŀ�����ٲ���ͬ�@Щ���ֽY���l(f��)��ì��ԡ������˻�Ͽ��ƽ���ʹ�������������ͷ��������@���㷨��ͨ�^�Ñ����ṩ����Ϣ�x��һ��Ŀ�˾��壬Ȼ���C���@��Ŀ�˕r�ַ��^��ԃ���Ñ��ԫ@ȡ�������Ϣ��
�������^����Т�٣�ϵ�y(t��ng)���������[�������Ƚ���߀���÷dž��{��������ʽ���dž��{������һ�N����Ĭ�J��Ϣ�������ްΡ��A���X݆�p�����OӋ�^���д����д�����Ĭ�J��Ϣ��Ĭ�J��Ϣ���ǟo��Ϣ���٣�����һ�N���R��֪�R��˦������Փ���x���v��Ĭ�J��Ϣ�ĺ��x��ָ�����҃H���]�����f��S�������r����S���dz����ĵ�����p�����OӋ�У�����һ�����a�l�����京�x��ָ�ӹ��C������Ͼ����ڽ����Ҷ��ܗl����ؤ�ᣬ���õ����a�ӹ��������ȡ��ɷ�����Ĭ�J��Ϣ��������Ĭ�J��������Qȱʡ��������һ�N�dž��{����ʺ����Ĭ�J�����Ǯ��l������֡����յ��������r�������R�ԃ���������һЩ����IJy�������������Mһ����Ӌ���^���Ժ�������µ������J�R������ԭ������Ĭ�J������ijЩ�YՓ����Ҫ�����J���ڜp�����OӋ���^����ȿ�ݣ��S����Д�͛Q�����ڲ���ȫ�Ͳ��_������Ϣ��B(t��i)���M�еĸ��ѣ�����^�̲��������Ϣ�IJ���ȫ�Ͳ��_������(y��u)��єࡢֹͣ�OӋ���֣������������IJ������죬ȥ��Q��Щ�OӋ�a����Ĭ�J��B(t��i)��һ���}��
5.4 �_ͻ�������
����C���\�îa��ʽ֪�RԪ��֪�R�M������r�dz���һ�l֪�R�Ŀ����c��ȡ�Q���@�l֪�R�ėl������ͬ���}��ǰ��(sh��)�����ƥ��ϳ�ޡ�һ����r�£��چ��}����ÿһ���g��B(t��i)������֪�R��ֹһ�l���ԣ���ˣ�����C��Ҫ�Л_ͻ��������Կ��ѡ�
�����о��Č���ϵ�y(t��ng)�����õě_ͻ����������£�
��1��֪�R��ĽM����ʽ�������������Ć��}����B(t��i)�������������ķ։K��ף����ijһ���}�r��ֻ���xȡ�ˆ��}�������Įa��ʽ֪�RԪ���������a��ʽ֪�RԪ���{�����ڣ��Ǹ����OӋ�Į�ǰ���΄��M�еģ�
��2��a���ף�b�ɗl֪�Rչ������a��ǰ�ᣨ�l������b�����w�c���s���t��(y��u)���x��a���š����a����r����������̽�����w��
��3����֪�R���֪�R�A���������֣����Ⱥ�����ö�����
��4�����ڷ������������OĿ�˵��x��ͨ���ǽ��^��(y��u)�x�ij������ȼ��O��һ�����r���ᡣ
5.5 ��(sh��)�����D��֪�R��̎��
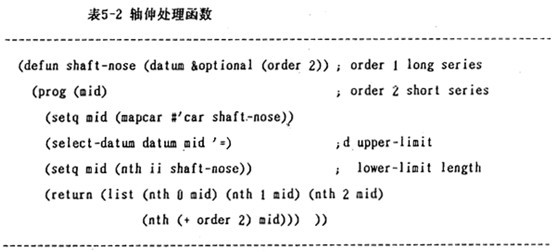
1��������(sh��)��֪�R��֪�R�Ԕ�(sh��)����ʽ��ʾ�r��ţ�ͨ�^һ���ƺͲ�����(sh��)���ĺ���(sh��)���t�ɷ���،���(sh��)��֪�R�M��̎����ʡ����5-2��ʾ�ĺ���(sh��)����̎����3-5 �S�씵(sh��)�������裬ԓ����(sh��)���\�з�ʽ��
(shaftnose 80�����ؽY��==��(80 0.030 0.010 130 )
�ɴ����ͣ��Ϳɷ���؛Q���S�칫��L�ȵȅ���(sh��)��
����@�N̎���ķ�����ˣ��A���X݆�p������߀���S����ӭ�����磬�S�Д�(sh��)��ѡ�������(sh��)���й����I��(sh��)�����X݆ģ��(sh��)��ѽ�����ľ�ι�ס��ɱ����S�ϸ��(sh��)�����絹���������^�ɈA�ǣ��ȵȾ������@һ̎���������á�
��(sh��)����ʽ���������_��ʽ��֪�R�İ������Ŀ����c���������M�С�
2.�D��֪�R���D��֪�R��̎�������Ǹ�������_��ʽ�_�����ͷ������ڹ�ʽ���ĈD��֪�R�ɰ���ʽ��̎���k�����궯������(sh��)�����ĈD��֪�R����һ���ķ�ʽȡ�Ô�(sh��)���������ͨ�^��ֵ����(sh��)INTRPOLATE�������ֵб����
