�A�����һ��X����ϵ�y(t��ng)�����W�����о�
4.1����
�Cе����ϵ�y(t��ng)���\�Ӻ̈́����Ʉ���Դ���f�o�C����(zh��)�м��Ĺ����^���н�������(j��ng)�����ܵ��������ͼ������ص����ù��ǣ��Ķ�ʹ����ϵ�y(t��ng)���㲿���a(ch��n)��Ť�D�����������ӌ�ֱ��Ӱ푵��Cеϵ�y(t��ng)�ľ��Ȼñ롢Ч�����ࡢ�������֡���ȫ�ԺͿɿ��Թε����ɴ˶��a(ch��n)��������Ҳ���h(hu��n)���a(ch��n)���ɔ_��Σ����������OӋ�Cе����ϵ�y(t��ng)�r���磬��횿��]����ӵ�����������һ�����������ѣ��Ա��Cϵ�y(t��ng)�������õĄӑB(t��i)���ԡ����OӋ�����ܵĈA�����һ��X�p�����ܶ����˽�ԓ����ϵ�y(t��ng)�ĄӑB(t��i)�����������б�Ҫ�����M��Ť������W�������Ա��u�r�����ˮƽ���������ҳ�Ӱ푄ӑB(t��i)���Եı����h(hu��n)��(ji��)���죬�Ķ����Mһ���ӑB(t��i)�Y����(y��u)���OӋ����ߜp�����ĄӑB(t��i)�����ṩ����Փ����(j��)��ȱ���u�r�����b�õĄӑB(t��i)����ͨ����ԇ��Ӌ�㷨�ɷN�������ϡ�һ����r�¸ʹ���ԇ�ɫ@���^�ʴ_�ĽY��ӻ������ֻ�m�����u�r�o���Č����ģ�͡���Ӌ�㷨ͨ�^���������Wģ�ͼ������OӋ�A�ξͿɫ@���u�rϵ�y(t��ng)�ӑB(t��i)��������ĸ��N��(sh��)��(j��)�Y�������ɸ���(j��)�����Y�����M�Ѓ�(y��u)���OӋ���Ķ����OӋ�A�ξ��ܵõ�һ���������ÄӑB(t��i)���Ե�ϵ�y(t��ng)�OӋ�����ٴУ����Ӌ�㷽����ԇ����(j��ng)�����õ��ԣ�����(sh��)�Wģ�͵Ľ�������һ�����y�ȡ�
��Ӌ�㷽�����p����ϵ�y(t��ng)�M�ЄӑB(t��i)�����r��ˣ��䳣�õĔ�(sh��)�Wģ���м��Ѕ���(sh��)ģ�Ϳ�Ƶ���ֲ��|��ģ�ͺ�����Ԫģ�����N������ǰ��������Ԫ����һ�N���^����ķ����Ĺݣ����ЬF(xi��n)�ɵ����ó���ܛ������NASTRAN,SUPGl,I-DEAS�ȣ��ɹ��Ñ�ʹ�ã�����Ҫ���Ñ����ஔ�ߵķ����c�Д������Լ��S���Č��`��(j��ng)ԓ���������Ą����Wģ���mȻ�����^�߰���ֻ���Á���������(sh��)�̶��Ĝp�������£��挦����(sh��)����ϵ�Мp��������������Ԫ���M�з������@�÷dz�������֬�������M�r�M���㼼��Ч�ʵ͡���������һ�µĄӑB(t��i)��(y��u)���OӋ����Ҫ�����в�ͬ�OӋ����(sh��)�Ĝp�����M�ЄӑB(t��i)�����ԫ@��Ӗ����(j��ng)�W(w��ng)�j�Ęӱ���ԣ��˕r����Ԫ�����@�ßo�ܞ�����������ˣ��ڱ����о��^���н������������Լ��Ѕ���(sh��)ģ�ͱ�ʾ���������շ����ޣ�ԓ��������ϵ�y(t��ng)�������^�cȥ����ϵ�y(t��ng)������ϵ�y(t��ng)�����W����̯Φ��������������ʹ�õ����ǘ����������ѽ������ܡ������嶪��������������λ�Ƽ��ˡ����ȣ������ʹ�����}���������麆���Ʒ�������ȫ��кڣ���Ӌ��Y����ȫ���ԝM�㹤�̌��H����Ҫ�����������������շ��̽�����ԓ�p������Ť������W����ի��Ӌ�������ĄӑB(t��i)����(sh��)�������ֲ���ˮ�����p����ϵ�y(t��ng)�M��Ӌ�㡢�������u�r������ҳ����䱡���h(hu��n)��(ji��)�߷̣����Mһ�������ӑB(t��i)�����ṩ����Փ����(j��)������Pro/ENGINEER������p���������S���wģ�͵�ί������ANSYS����Ԫ����ܛ�����A�����һ��X�p�������P�I���Ӽ��M����ģ�B(t��i)������ͽ��
4.2ϵ�y(t��ng)Ť������Wģ�͵Ľ���
������A�����һ��X����ϵ�y(t��ng)�ĄӑB(t��i)���ԣ�������Ҫ����(j��)ϵ�y(t��ng)�Y������������Wģ��ӧ�����A�����һ��X���ӵĽY�����D��D4-1��ʾĦ�ơ�
����(j��)���N��������W���õIJ�ͬ���ɰѽM��ϵ�y(t��ng)�ĸ�Ԫ���ֳɃ��˩�����T��Ԫ���͏���Ԫ����л���T��Ԫ��ָ���Ǹ��S���S�ϵ����D�|�������X݆��Ʒ���S��ֱ���^������ȱP������Ю��������ϵ�y(t��ng)�l(f��)��Ť�D��ӕr������������ϵ�y(t��ng)�Ą����W���ã���Ҫ��ӳ���D�ӑT��������������ԷQ֮��T��Ԫ��®Ǯ������Ԫ����ָ�ɑT��Ԫ��֮�g���S�Σ������Բ�Ӌ�|����ֻ���]Ť�D׃��ϱ�룬�������ϵ�y(t��ng)���������ڱ�����Ť�D���ȵ�ͼ��
�����A�����һ��X�p����Ť������Wģ�͕r�������X�������|���^����L�����^С���������ֻ�БT�Զ��o���ԵđT��Ԫ����Ա����ͬһ�S�ϸ��T��Ԫ�����D�ӑT������(j��)���H��r���ң��D�Q��ԓ�S�ăɶˣ��γɃɂ���Ч�A�P��ʥ��Ӌ��Ʉ��ԈA�P֮�g�����S�ε�Ť�D���Ⱥ��D�ӑT��¹������S�ε��D�ӑT�����ӵ�ԓ�S�ăɑT��Ԫ���ϣ�һ���ƽ�����䣩�����S�ε�Ť�D�����D�Q��һ�������S�ε�Ť�D����׳Ө����ֵ���c�ɑT��Ԫ��֮�g���H�S�ε�Ť�D������ȳ��ġ�
���ڈD4-2a����ʾ�Ļ��X�c�����S֮�g�����X�c����֮�g���������X�c���w֮�g�ć��ϸ������ԵΣ�������̎�ď���׃�β��ܺ��ԕr����������һ����Ч�ď����S�ν�̨��ҕ��һ������Ԫ���ߴ�����D4-2b��ʾ��
����(j��)���攢���ķ���թ�������Խ�������D4-3��ʾ�Ą����Wģ�ͺ��ࡣ����ڷ��������A�����һ��X����ϵ�y(t��ng)�Ą����Wģ�ͺ���������������һ��������������ʸ�������X��Ť����Ĺ�����B(t��i)��ȫ��ͬ���ʿɌ����еĻ��X��Ч��һ���T��Ԫ����ƨ��������(j��)���ܲ�׃��ԭ�t�ſݣ��������X���ć��τ����D�����Ч��Ť�D����˳�裬Ȼ��B�ӵó����w�ĵ�ЧŤ�D����Ӽ��ɴˣ������X�c�����SӨ�顢���ܼ����w�g��(li��n)�ď����B�Ӻ�����քe��Ч��һ�������S��ذ������Ч������Ą����Wģ����D4-4��ʾ��
4.3ϵ�y(t��ng)Ť��(sh��)�Wģ�͵Ľ���
������ģ���Mһ���D�Q��朠�Y����ɶ���˕r�γѣ��茢�D4-4�и��S�ϵĄ��ԈA�P�͏����S���D�Q��ͬһ�S���Ϲ��ţ����Ɇ�һ�S���ĵ�Ч�A�Pϵ�y(t��ng)��Ť������Wģ�͡��D�Q�r��ţ����D�Q��ݔ���S�ϸٳҲ���D�Q��ݔ���S�����g��һ�����S�ϡ��D�Q��կ�������D�Qǰ��ϵ�y(t��ng)�Ą��ܺ̈́��ܱ��ֲ�׃��ԭ�t��㡣�����Ѕ���(sh��)�D�Q��ݔ���S�ϣ��O

��

�քe���D�Qǰ����T��Ԫ����Ť�D����ӣ������ӱ��Pϵ�У�

��4-1��
ʽ�� i�����p�����Ă��ӱ�ˬ��
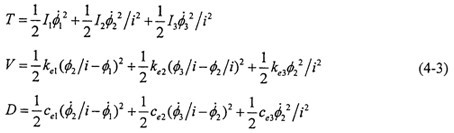
�D�Qǰϵ�y(t��ng)�Ĺ���T������V�����ṦD�քe�飺
ʽ�� I1���������S�D�ӑT����kg��m2����˯��
I2�������X��Ч�D�ӑT����kg��m2����
I3���������D�ӑT����kg��m2)��
ke1���������S�c���X�g�ĵ�ЧŤ�D���ȣ�N��m/rad��Ư����
ke2���������c���X�g�ĵ�ЧŤ�D���ȣ�N��m/rad���Ằ��
ke3�������w�c���X�g�ĵ�ЧŤ�D���ȣ�N��m/rad����
Cel���������S�c���X�g�ĵ�ЧŤ�D���ᣨN��m��s/rad�����ģ�
Ce2���������c���X�g�ĵ�ЧŤ�D���ᣨN��m��s/rad��������
Ce3�������w�c���X�g�ĵ�ЧŤ�D���ᣨN��m��s/rad����
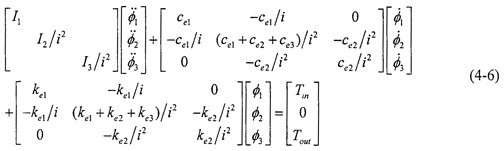
����(j��)�D�Qǰ��ϵ�y(t��ng)�Ą��ܸ��ʡ����ܺ����Ṧ���ֲ�׃��ԭ�t���ᣬ��ʽ��4-1������ʽ��4-2���У��õ��D�Q��ϵ�y(t��ng)�Ą������ˡ����ܺ����Ṧ�քe�飺
���D�Q��朠�Y����ϵ�y(t��ng)��;�������������շ�����ϵ�y(t��ng)��Ť������W���̣�ϵ�y(t��ng)�Ў���ճ���������壬����г����к�ɢ����(sh��)���������շ���
ʽ L�����������պ���(sh��)L=T-V��٣�

�����V�x���ˣ�i=1��2ſ����3�����飻

�����V�x����N����i=1��2ծ�ԣ�3������
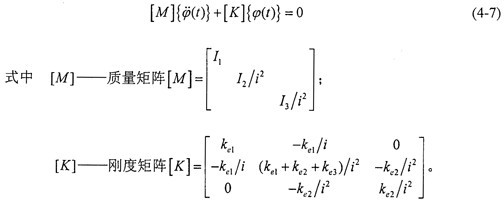
��ʽ��4-3�������������շ��̣�4-4���У��õ�ϵ�y(t��ng)�Ą����W����������ʾ��
��ʽ��4-5���þ����ʽ���_��Ǧ���tϵ�y(t��ng)�Ą����W���̿Ɍ��飺
4.4ϵ�y(t��ng)�������Լ����ֲܷ���
ϵ�y(t��ng)�����l���Լ����������ͱ��F(xi��n)��ϵ�y(t��ng)�Ĺ�������ѡ�����䔵(sh��)ֵֻ��ϵ�y(t��ng)�����ą���(sh��)���P�����c�����l���o�P�߽���ͨ�^�о�ϵ�y(t��ng)�Ĺ������Կ��ţ��Ɍ�ϵ�y(t��ng)�Ą����W�����M�з����ܾ���������(j��)�����Y���ĽY������(sh��)�����_�����Y����(y��u)���OӋ��Ŀ�����ǡ�
4.4.1ϵ�y(t��ng)�����l�ʺ�������
�ڷ������u�r�p����ϵ�y(t��ng)Ť�����ԕr��Ϥ����ҪӋ��ϵ�y(t��ng)�ĸ��A�����l���Լ������������ͣ��@��Ҫ���ϵ�y(t��ng)�ğo����������ӷ�����ң����ϵ�y(t��ng)������ӕr�������������غ���������㣬�˕rϵ�y(t��ng)�Ą����W���̿ɱ�ʾ��
�����ϵ�y(t��ng)�o����������ӷ��̿�Ƶ������ӵ���r��ѿ�������̣�4-7���Ľ�Ɍ���������ʽ��

��4-8��
ʽ�� �ء������ЈA�l�ʣ�rad/s)��
{

}������λ�Ƶ�������������ʡ�
��ʽ��4-8������ʽ��4-7���аεڣ�����ȥ����Sin��t���õ�
��[K]-��
2[M]��{

}=0 ��4-9��
��
2��{

}�ַQ��V�x����ֵ�͏V�x���������������ɴ��ð������ϵ�y(t��ng)�����l�ʺ������͵Ć��}���D������ⷽ�̣�4-9���ďV�x����ֵ�͏V�x���������Ć��}��
4.4.2ģ�B(t��i)��Ⱥ̈́��ֲܷ���
��ʹ�OӋ��ϵ�y(t��ng)�������õĄӑB(t��i)���Թ����ڽ����˷�ӳ����ϵ�y(t��ng)�ӑB(t��i)���ԵĔ�(sh��)�Wģ�͵Ļ��A��Ӿ⬣��Ɍ��Y���M���ĺ̓�(y��u)���OӋ��ͨ����Ҫ��ѽY������ӏ��Ȼ�����������һ���ķ�������ֲ���P�I�^���������ҳ��Y���ı����h(hu��n)��(ji��)�÷⣬Ȼ����ᘌ��Ե��ı����h(hu��n)��(ji��)�ľֲ��Y�����Ķ�ʹ����ϵ�y(t��ng)�ĄӑB(t��i)���ԝM��Ҫ�����������茦ϵ�y(t��ng)��ģ�B(t��i)��Ⱥ̈́��ֲܷ����M�п����ο���
����ϵ�y(t��ng)���������Emax���c��������{��}��ƽ�������ȵģ���Փ�����С��α��У��@�������Pϵ����һ����ЧЫ����ˣ�ģ�B(t��i)�����һ���c����o�P�ą���(sh��)���������С�Hȡ�Q��ϵ�y(t��ng)�ĽY������(sh��)�����텢��(sh��)���ࡣ��׃�Y������(sh��)�����텢��(sh��)�Ĵ�С�����÷�ʽʳ��������ʹ��l(f��)�����@��׃�����㡣ϵ�y(t��ng)�ĵ�s�Aģ�B(t��i)���R(s���Ķ��x��
ʽ��

����ϵ�y(t��ng)ĩ���ڵ�s�Aģ�B(t��i)��ӕr��Ť���ֵ��rad����

����ϵ�y(t��ng)�е�i������Ԫ���ڵ�s�Aģ�B(t��i)��ӕr�ğ������롣��ֵ��
ʽ��

����ϵ�y(t��ng)�е�i������Ԫ���ڵ�s�Aģ�B(t��i)��ӕr���D�ǣ�rad����ɡ�
ģ�B(t��i)��ȵĴ�С������ԓ�Aģ�B(t��i)��Σ�U�̶ȡ�ģ�B(t��i)���Խ��ҵ�ᣬԓ�Aģ�B(t��i)ԽΣ�U��л���������܃H�{ģ�B(t��i)���ֵ���������ģ�B(t��i)Σ�U��ԭ��_���Y���ĵIJ�λ���ă������£�߀��횿����������Ԫ���Ą��ܻ���ֲܷ���Ұ�������ֲܷ��ʶ��x��
���ֲܷ��ʵĴ�С����ϵ�y(t��ng)�Џ���Ԫ��׃���ܵĴ�С�����ֲܷ�������Ԫ��Ҳ����ϵ�y(t��ng)������h(hu��n)��(ji��)��̾�������ԓ�Aģ�B(t��i)Σ�U����Ҫԭ���������(j��)�˿��Դ_�������ĸ��M��ʩ�������ϵ�y(t��ng)�ĄӑB(t��i)�������硣
4.5Ť������Wģ�ͅ���(sh��)�Ĵ_��
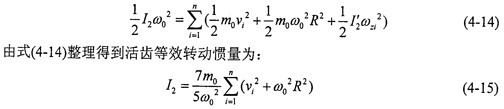
�����A�����һ��X�p����Ť������Wģ��ΨѼ������Ҫ�_��ģ���еą���(sh��)�����а����΅���(sh��)��ȷ�����텢��(sh��)�����d�Ʌ���(sh��)Ŀ�ȡ��΅���(sh��)ͨ�^���p����ϵ�y(t��ng)�Y���OӋ���_�������텢��(sh��)�����|������(sh��)�����D�ӑT������ũ�����ȅ���(sh��)������X�����τ��ȣ������ᅢ��(sh��)�����S����Ť�D���ᣩ�Ը�������o�����X��Ч�D�ӑT�������X����ЧŤ�D���Ⱥ��S����Ť�D�����Ӌ�㷽��ѭδ��
4.5.1�T��Ԫ�����D�ӑT��
�ڈA�����һ��X��������è�����л��X���H�؈A�ܷ������������D��ͬ�r߀���S�䷽��l(f��)��λ���Ҹ硣�麆��ϵ�y(t��ng)�Ą����Wģ�����֣������(j��)���ܲ�׃��ԭ���������л��X��Ч��һ���T��Ԫ��������
���л��X�Ŀ����ܣ�
n�������X����(sh��)¹��
R�������X�ڈA�ܷ���ķֲ��돽��mm����
v
i���������X���S�������\���ٶ�v
i=A��
0Z
3cos��Z
3
�����𣬣�mm/s�����ͣ�

���������X�D�ӑT��

����kg��mm
2��������
��
zi�������X���D���ٶȦ�
zi=

��rad/s������
r�������X�돽��mm����
��0�������X�ڈA�ܷ�������D���ٶȣ�rad/s�����ࣻ
m
0���������X���|��m
0=

ʹ������kg����
P�������X�IJ����ܶȣ�kg/mm3�����ӡ�
����(j��)�D�Qǰ����ܲ�׃��ԭ�t�̷���������ʽ��
4.5.2����Ԫ����Ť�D����
���X���ć��τ�����ָ�����r���X����ͬ�ֿ�׃�ε����������c���ϸ��ľC�Ϗ���׃�����P���ܣ����c���|����r�¿�ţ���ɽ��|�w׃��څ������
ʽ�� F�������|�c̎������������N�����ˣ�

������Ɲϵ��(sh��)��
��P���������ʺͣ�1/mm������
���X���ć��τ��ȿɱ�ʾ��
�����X�����τ��Ȍ����w���ȵ�ؕ�I�ǽǶȵĺ���(sh��)�ռ������ܺ��ίB�ӡ������Ҫ�ȸ���(j��)���ܲ�׃��ԭ�t��鹣��������X�����τ����D�����Ч��Ť�D������վ��Ȼ��B�ӵó����w�ĵ�Ч��Ť�D���ȡ�
���ڻ��X�c�����S�����w�����ҝL���ć��ϸ����fȬ���������S�Ľ�λ�ơ� �ڽ��|�c�������ķ����Ϯa(ch��n)���ĵȃr��λ�ƞ�
x
i=R
2��

��sin
2a
ni��cos
2��u
i�� ��4-18��
ʽ�� ani�������|�ǣ�rad��������
ui����˲�r���|���ķ�λ�ǣ�rad����
�ɇ��τ��Ȯa(ch��n)���Ą����c�D�Q���Ť�D���Ȯa(ch��n)���Ą���������ͣ����з���
ʽ�� Ki�������τ��ȣ�N/mm��������
n�������X����(sh��)��
��ʽ��4-18������ʽ��4-19�����������õ���Ч���Ť�D���Ȟ�
ͬ��Ͽ�磬���ڻ��X�c���ܵć��ϸ����f�����τ����D���ɵȃ�Ť�D���Ȟ�
4.5.3�S����Ť�D����
�S������Ť�D������Ҫ�Dz��������̸�������(j��)H.H.Lin��C.Lee�ȵķ������磬��Ť�D�����������ʽ�M��Ӌ�㣺
ʽ�� ks�����S������Ť�D���ȣ�N��mm/rad����
��s�����S������Ť�D����ϵ��(sh��)���壬����(j��)D.R.HOuser�ȵ�ԇ��о����죻
��sһ��ȡ0.005��0.075��
I1���ͣ�I2�����քe���S�����ɶˑT��Ԫ�����D�ӑT����kg��m��mm�����⡣
4.6�A�����һ��X�p����Ť��ӑB(t��i)���Է���
�����_���A�����һ��X�p�����ĽY������(sh��)�������S���ҝL�����ڔ�(sh��)Z1=1�����w���ҝL�����ڔ�(sh��)Z3=4��̥�����ӱ�i=5�˿������X�돽r=4mm�����ҝL����ֵA=4mm���ݣ����ܱں�b=3mm�¿����ҝL�����b1=2mm���~��ݔ���D��150Orpm��κ���~��ݔ��Ť��20N.m���㡣����ǰ�潨���ĈA�����һ��X�p����ϵ�y(t��ng)�Ą����Wģ�͌��p����ϵ�y(t��ng)�M��Ť��������ҳ�ϵ�y(t��ng)�Ĺ������Ժ������������l�ʺ����������������S�е����D�����С���@����Բ�Ӌ������(j��)�p������Ԫ�����H�ߴ缰ʽ��4-20�����硢��4-21��Ӌ��õ����T��Ԫ���ĵ�Ч�D�ӑT����ơ�����Ԫ���ĵ�ЧŤ�D�������4-1��ʾ��
��4-1�T��Ԫ�����D�ӑT���͏���Ԫ����Ť�D����
|
Il
��kg��m��mm�� |
I2
��kg��m��mm�� |
I3
��kg��m��mm�� |
ke1
��N��mm/rad�� |
ke2
��N��mm/rad�� |
ke3
��N��mm/rad�� |
|
0.06452 |
0.00928 |
0.140163 |
1.1589��106 |
9.6431��107 |
1.4606��107 |
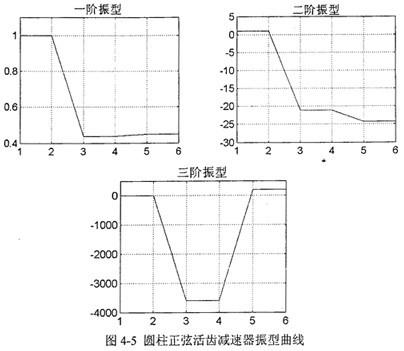
����(j��)ʽ��4-9��״������4-10������4-12��Ӌ��������l�����������ֲܷ��ʺ�ģ�B(t��i)���Ҋ��4-2�������Matlab���Ƴ���߀�L�Ƴ��D4-5��ʾ�Ĝp����ϵ�y(t��ng)�����������ų档
��4-2�A�����һ��X�p����Ť������W�����Y��
|
�����l�ʣ�Hz) |
644.357 |
1539.216 |
17922.727 |
|
������ |
{1.0000,0.43699,
0.44766} |
{1.0000��-21.037,
-24.347} |
{1.0000��⬣�-3525.3,
202.23} |
|
��
��
��
��
��
|
����Ԫ��1 |
0.8960135 |
0.0945825 |
0.0094040 |
|
����Ԫ��2 |
0.0004073 |
0.1271889 |
0.8724037 |
|
����Ԫ��3 |
0.1035791 |
0.7782286 |
0.1181923 |
|
ϵ�y(t��ng)ģ�B(t��i)���
��10-6(rad����N��mm)) |
0.18604 |
1.78412 |
0.0006657
|
ͨ�^��4-2�еķ����Y���҂����Կ����Ե������A��1539.246Hz��ϵ�y(t��ng)ģ�B(t��i)����������ԓ�Aģ�B(t��i)��Σ�Uģ�B(t��i)���á�Ҫ�ҳ����ԓ�AΣ�Uģ�B(t��i)�ľ��wԭ�����ޣ��҂����Կ��������Ԫ���Ą��ֲܷ��ʡ��ı�4-2�п��Կ������ޣ��˕r3̖����Ԫ���Ą��ֲܷ������������@�f����Ť�D�r��飬���ď���׃��������⣬����������h(hu��n)��(ji��)�������Σ�Uģ�B(t��i)����Ҫԭ�����������@���YՓ���l(f��)�Ǽţ�����Բ�ȡ������ʩ�����M�OӋ������Я��ͨ�^�m�������w���ҝL���c���X�g�ć��τ��ȁ���ߵ�ЧŤ�D���ȣ���ɸ���ԓ�p�����ĄӑB(t��i)������κ���ӑB(t��i)���ܺõ�ϵ�y(t��ng)��ԓ�Ǹ��Aģ�B(t��i)���С����ÿ�Aģ�B(t��i)�и�Ԫ���������ֲ�����t�ˡ������_���@��Ŀ�ˣ����������������^�m(x��)�{�����P����Ԫ����Ť�D���Ȱ�˽��ֱ���@�ÝM��ĽY����ֹ���ɡ�
��ؓ�d׃�����`���^С����r�£��A�����һ��X�p����ϵ�y(t��ng)�ļ����l�ʾ��LJ��τ��ȵ�׃���l����ү������Ӌ�����£�
ƒ=n1/60=25Hz ��4-23��
ʽ�� ni����ݔ���S�D�٣�rpm)���ơ�
�ɱ�4-2�нY����֪���p����ϵ�y(t��ng)��һ�A���l��644.357Hz�ۺ⣬ϵ�y(t��ng)���l�h�h���ڼ����l�����ݣ����ԓ�p���������ˮƽ�^�ͣ���Ӻ����^С��Ы��
4.7�A�����һ��X���ӵ�����Ԫģ�B(t��i)����
����Ԫ����FEM����һ�N����Ӌ��C���Y���o��ݺ���ӑB(t��i)���W���ԵȆ��}�Ĕ�(sh��)ֵ�����������о��ȸߡ��m���ԏ��Լ�Ӌ���ʽҎ(gu��)���y(t��ng)һ�ȃ�(y��u)�c���죬�F(xi��n)�яV�������ڙCе��ʷ�����������܇�����óӪ����ľ���˹��̼����̵��S���I���������ɞ�F(xi��n)���Cе�a(ch��n)Ʒ�OӋ����Ҫ���߳�֬����ǰ�����H�����Ӱ���������Ԫ����ܛ��֮һ������ANSYS��˾�_�l(f��)��ANSYSܛ��������
ANSYSܛ�����ڽY���Ƽ塢����W�����w�ij���늴����ơ��W�����Ʒ�����һ�w�Ĵ���ͨ������Ԫ����ܛ����裬���书�����ÿɷ֞飺һ��ǰ̎������ȯ��һ����������ɂ���̎������Σ���ׂ��o��̎�����Ⱥ�Ԩ��ǰ̎����������������Ԫģ�ͣ����������ʩ���d�ɼ�߅��l��Щ�����������\��ո�壻��̎�������ګ@ȡ���Y�����Ա㌦ģ�������u�r���š������ͱΣ�ANSYS߀�ṩ�ˏ���Ĕ�(sh��)��(j��)�ӿڳ���ʹ��������CADܛ���н�����ģ�Ϳ��Ժܷ���Č���ANSYS�����£�һ��ģ�ͳɹ���������⣬�Ϳ�������ANSYS�Є�(chu��ng)����ģ���ǘӌ���ģ���M������\�㡣�@Щ�ӿڳ�������ANSYS��˾��CAD�����̾�����ܛ���塣
����ֵ��ע�����ANSYS-Pro/ENGINEER�ӿڻٿݣ�������ṩ���Ԉ�(zh��)�в�������A�ą���(sh��)����(y��u)���OӋ�Ĺ��ܡ�ԓ�������S�ɲ�������A�ą���(sh��)��Pro/ENGINEERģ���_ʼ���ƣ���ANSYS�������M�Ѓ�(y��u)�����꣬����һ����(y��u)����Pro/ENGINEERģ�ͽY�����������Բ�������A�ą���(sh��)��ģ��ȿ�ܡ�
4.7.1�p�������S���wģ�͵Ľ���
�M������Ԫ����ǰ���ȱ�횽����p���������S���wģ��¸�ϡ��mȻANSYS������Ԫ����������Џ���Ĺ��ܣ����������S���w��ģ���沢���Ȍ��I(y��)��CADܛ��ռ�Ѓ�(y��u)�ݡ����ڏ��s�Č��wģ�ͼ�ʾ���������������ܛ���������������
���������S���w��ģܛ����Ҫ��Pro/ENGINEER��Ideas���Ρ�UG���þ�����������PTC��˾�_�l(f��)��Pro/ENGINEER�������ϵ�һ�����������ą���(sh��)�����w��ģܛ�����������S��ģ�贶�������Ǐ��s��������ͷ���̎�ڇ��H�I��ˮƽ�ϲ������]���A�����һ��X�p������̧���������S�����w������Č��w�������^���s���ڣ���˱��IJ���Pro/ENGINEER���p�����M�����S���w��ģ���С�
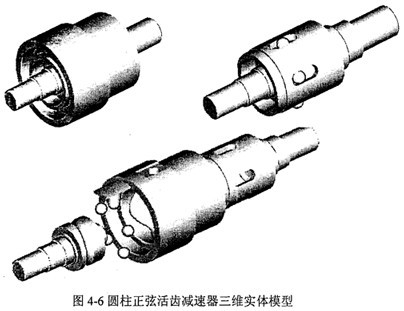
���M������Ԫ�����rĹ�ϣ��҂�����˨�����w���o��������Ժ������Σ���ֻ�Pע�c�p��������ֱ�����P�������S��ʴ�����X�����͚ܺ��w���P�I������ţ���(j��)�˽����p�������S���wģ����D4-6��ʾӾ�䡣
4.7.2�����S�����ܵ�ģ�B(t��i)����
�ڽY�������W�����У�ģ�B(t��i)�������ڴ_�����OӋ�ĽY����C��������������ԣ������l�ʺ����ͣ����ҡ����������S�͌��܄����W����ֱ��Ӱ표p���������ܼ������鱻�����ԑ��������S�������M��ģ�B(t��i)�������䣬�_��������l�ʼ�����ַо��Ҳ���V푑��������S�C��ӷ�����(chu��ng)��l���ܾ���
���ģ�Ͳ���IGES��ʽ����ANSYS��ը�����ڽY���к��Џ��s�����ģ�ͣ�Pro/E��ANSYS�ж��x���ؓ�Y��Ҳ���M��ͬ���죬��ֱ�ӌ���Pro/E��ݔ����IGES��ʽ���wģ�͌���ANSYSѮ��������ʹ�W(w��ng)�ֺ��M�����r�g���������o����ģ�̈́��־W(w��ng)����Ӥ��������ϣ�������Pro/E�ЃH��ģ�͵ı�����IGES��ʽݔ�����ڌ���ANSYS��������VA�����������������Ɍ��w���ѡ�ֵ��ע����ǣ������w֮ǰ��������AGLUE����z�����c�潻����B�m(x��)��̯������t�����ܳɹ����Ɍ��wģ��ͷѬ��
�ؓ����a���x���Ԫ��solid45��ָ������ģ����2.06��1011N/m2Ӱż���ܶȞ�7800kg/m2ת�죬���ɱȞ�0.3����ģ�Ͳ����˹��W(w��ng)��ȷ��������LESIZE�����ƾW(w��ng)���ܶȽ����]�������S���g���ҝL���ĽY�����c���ָ����ҝL��߅�����������ҝL�������l�ؓ侀Ѣż����ʹ���ָ���ܶ���ͬ�����ڌ��ܣ��ָ���X�۵�ֱ߅��Ш����ʹ���ָ���ܶ���ͬ���
�����w��Ԫÿ����(ji��)�c���������ɶȣ�Tx,Ty,Tz)��ͨ�^���ƹ�(ji��)�c�����ɶ���д����ģ��ʩ�Ӽs���в���ģ�M�S�е����ã��ڰ��b�S��̎���������ʩ�Ӽs�����������Ȍ����������й�(ji��)�c�������ɵѿ������ˣ�x,y,z���D�Q�������ˣ�R,��,Z)����Ȼ���������ɶ�R�����������S��ݔ���S����͌��ܵ�ݔ���S������Ӧ���������й�(ji��)�c�����ɶ���˾�����־W(w��ng)��ʩ�Ӽs���������SҊ�D4-7��

�x��Subspace����ֵ�������Ʈ��ָ���Uչģ�B(t��i)��(sh��)��4�����l�ʷ�����0��1000Hz�����ݔ���S��ǰ���A�����l�ʞ�101.SHzнͭ��207.2Hz�ڹ���660.6Hz��661.2Hz����������������Ҋ�D4-8ν�ޡ�һ�A���͞��@z�SŤ�D�����A���͞���z�S�S��������̲�����A���͞���xozƽ�揝��������A���͞���yozƽ�揝����
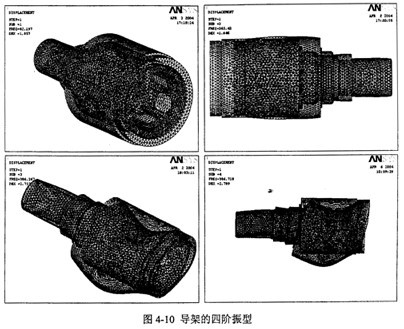
ͬ�ӄ��־W(w��ng)��ʩ�Ӽs����ݔ���SҊ�D4-9�ܵࡣ���ݔ���S��ǰ���A�����l�ʞ�82.2Hz�Ѵ�265.4Hz��Ψ��386.2Hz��386.7���в��������ĸ�����Ҋ�D4-10��̵��һ�A���͞��@z�SŤ�D�����A���͞���z�S�S�������ԣ����A���͞���xozƽ�揝�����ѣ����A���͞���yozƽ�揝����
����(j��)���D�S�D���c�l�ʵ��Pϵ��
n=60��ƒ ��4-24��
ʽ�� n�����D�٣�rpm����˥��
ƒ�����l�ʣ�Hz��������
�������S�����ܵĹ����l���D�����R���D�ٺ�ֺ�����ýY��Ҋ��4-3ѫ��
��4-3 �����S�����ܵ��R���D�� ��rpm��
|
|
�����S |
���� |
|
�A�� |
1 |
2 |
3 |
4 |
1 |
2 |
3 |
4 |
|
�D�� |
6108 |
12432 |
39636 |
39672 |
4932 |
15924 |
23172 |
23202 |
ݔ���S��ݔ���Ĺ����D�ٷքe��1440rpm��288rpmԸζ���ı�4-3�п��Կ������������S�Ĺ����D�پ����ڵ����R���D�١�
4.8�����Y
1.���A�����һ��X�p�����ĸ�����������������đT��Ԫ���͏���Ԫ���ʳˣ������p������ϵ�y(t��ng)�����Wģ�ͣ������������շ��̏�ϵ�y(t��ng)�����ĽǶȽ����˜p����ϵ�y(t��ng)�Ą����W��(sh��)�Wģ���¾��o���˻��X��Ч�D�ӑT�������ϸ���ЧŤ�D���Ⱥ��S���������Ӌ�㹫ʽ������
2.����(j��)�����Ą����Wģ�ͣ�ͨ�^�������A�����һ��X�p����ϵ�y(t��ng)�ğo����������ӷ���Ͷ�����õ���ԓϵ�y(t��ng)�Ĺ����l��������ģ�B(t��i)��Ⱥ��A���͵ȹ��ЄӑB(t��i)���ԅ���(sh��)���Y���������£�ԓ�p�����������õĄӑB(t��i)���Թؾܣ�
3.����(j��)�����ģ�B(t��i)��Ⱥ�����Ԫ���Ą��ֲܷ��ʣ��ҵ���Σ�Uģ�B(t��i)������Σ�U�ı����h(hu��n)��(ji��)ӹ�飬���Mһ�����M��YΦ�U�Ű�����߄ӑB(t��i)���ԣ��ṩ����Փ����(j��)��ξ��
4.����Pro/ENGINEER������p���������S���wģ��¶����������Ԫ����ܛ��ANSYS���әC�е��P�I���M����ģ�B(t��i)������