���зǾ����t������䓽z�K(li��n)�S����ģ�c����(sh��)���R(sh��)
3-1����
������(du��)(li��n)�S�����(d��ng)ԇ�(y��n)�о��Y(ji��)����֪նԵ���ڴ�λ�����(d��ng)��r����ף�(li��n)�S�����F(xi��n)���Ǿ����t�����ԣ��@һ����ֱ���c(li��n)�S����(d��ng)���ȼ��������P(gu��n)����(d��ng)�@�N(li��n)�S�����ڴ������M(j��n)�Sϵ�r(sh��)Ӿ������Ӱ푵��Sϵ�Ą�(d��ng)���������������Ū���(li��n)�S���֏�(f��)���c��(d��ng)���Ⱥ�������P(gu��n)ϵ�̽ģ�������(li��n)�S���֏�(f��)���Ĕ�(sh��)�W(xu��)ģ����ʮ����Ҫ�ģ���(du��)�����˷����о����M(j��n)�Sϵ�Ą�(d��ng)������Ҳ�Dz���ȱ�ٵĶ��ء�
��䓽z�K(li��n)�S����  -x�t���ؾ���֪�ŷ���(li��n)�S�����t�����Բ������p����ģ�́�(l��i)��������Ҫԭ�����p����ģ���c(li��n)�S���Ą�(d��ng)�B(t��i)�t���ؾ�����������h(yu��n)���꣬�p����ģ�͌�ϵ�y(t��ng)����ϵ��(sh��)̎���ɶ���(g��)���Ԅ���ϵ��(sh��)���@����������䓽z�K(li��n)�S���ķǾ����t�������еķǾ��Ԅ���ϵ��(sh��)�������p����ģ������H̎����Ħ�������˻��Ҳ����������(li��n)�S������ď�(f��)�s�ɷ֡�һ�A�ַ���ģ����Ҫ�����t��ϵ�y(t��ng)���S�C(j��)푑�(y��ng)���������裬�@�Nģ������Ӌ(j��)���t��ϵ�y(t��ng)�ķ�(w��n)�B(t��i)��(d��ng)��푑�(y��ng)�ܲ������о���ģ���и�����(sh��)���������x�����_��ģ����ʽ�����ڸ�����(sh��)�ı��R(sh��)���Σ����ҏ��������������ڻ֏�(f��)�����_(d��)ʽ�в��@�F(xi��n)��Ļ����������Փ�������ֺ�����ƽ���͵�Чԭ�����E�����Դ˞���A(ch��)K0�Ƚ�����ģ�Ͷ����Լ��IJ���̨�㣬ǰ��ֻ�������t���֏�(f��)���cλ�ƺ��ٶȵ��P(gu��n)ϵ��������ȫ�������t���֏�(f��)���c�����(d��ng)����(sh��)���P(gu��n)ϵ��Ϲ������ֻ����������(g��)�A�ηǾ��ԏ��Ʉ��ȹ��ţ��䑪(y��ng)�÷����ܵ����ơ��ɴ˿�֪ң�֣��F(xi��n)�������t�����ԵĔ�(sh��)�W(xu��)ģ�Ͷ������Á�(l��i)����(li��n)�S���ķǾ����t�����Ը��ᡣ��ˣ�������ǰ���о��Ļ��A(ch��)��ç�̣��о�(li��n)�S����(d��ng)���Ⱥ���������ԲtǴ���������ܺ�������(li��n)�S���Ǿ����t���������ܝM���^�߾���Ҫ��Ĕ�(sh��)�W(xu��)ģ�͡�
-x�t���ؾ���֪�ŷ���(li��n)�S�����t�����Բ������p����ģ�́�(l��i)��������Ҫԭ�����p����ģ���c(li��n)�S���Ą�(d��ng)�B(t��i)�t���ؾ�����������h(yu��n)���꣬�p����ģ�͌�ϵ�y(t��ng)����ϵ��(sh��)̎���ɶ���(g��)���Ԅ���ϵ��(sh��)���@����������䓽z�K(li��n)�S���ķǾ����t�������еķǾ��Ԅ���ϵ��(sh��)�������p����ģ������H̎����Ħ�������˻��Ҳ����������(li��n)�S������ď�(f��)�s�ɷ֡�һ�A�ַ���ģ����Ҫ�����t��ϵ�y(t��ng)���S�C(j��)푑�(y��ng)���������裬�@�Nģ������Ӌ(j��)���t��ϵ�y(t��ng)�ķ�(w��n)�B(t��i)��(d��ng)��푑�(y��ng)�ܲ������о���ģ���и�����(sh��)���������x�����_��ģ����ʽ�����ڸ�����(sh��)�ı��R(sh��)���Σ����ҏ��������������ڻ֏�(f��)�����_(d��)ʽ�в��@�F(xi��n)��Ļ����������Փ�������ֺ�����ƽ���͵�Чԭ�����E�����Դ˞���A(ch��)K0�Ƚ�����ģ�Ͷ����Լ��IJ���̨�㣬ǰ��ֻ�������t���֏�(f��)���cλ�ƺ��ٶȵ��P(gu��n)ϵ��������ȫ�������t���֏�(f��)���c�����(d��ng)����(sh��)���P(gu��n)ϵ��Ϲ������ֻ����������(g��)�A�ηǾ��ԏ��Ʉ��ȹ��ţ��䑪(y��ng)�÷����ܵ����ơ��ɴ˿�֪ң�֣��F(xi��n)�������t�����ԵĔ�(sh��)�W(xu��)ģ�Ͷ������Á�(l��i)����(li��n)�S���ķǾ����t�����Ը��ᡣ��ˣ�������ǰ���о��Ļ��A(ch��)��ç�̣��о�(li��n)�S����(d��ng)���Ⱥ���������ԲtǴ���������ܺ�������(li��n)�S���Ǿ����t���������ܝM���^�߾���Ҫ��Ĕ�(sh��)�W(xu��)ģ�͡�
3-2�M�Ϸֽ�֏�(f��)��һλ���t���ؾ�
��һ�µ�ԇ�(y��n)�о�����������䓽z�K����(li��n)�����ı���(g��u)�P(gu��n)ϵʮ�֏�(f��)�s��ѹ����֏�(f��)����(li��n)�S����(d��ng)���Ⱥ�����ĺ���(sh��)������(d��ng)���Ⱥ���������������l�ʵĺ���(sh��)��ϻ��������飬�҂�������ԇ�(y��n)�@�õĜy(c��)����(sh��)��(j��)�����E�����īI(xi��n)�Ļ��A(ch��)�����䣬�����о�(li��n)�S���t�����Իൻ������(li��n)�S���Ĕ�(sh��)�W(xu��)ģ�͡�
��ǰ��(li��n)�S��λ��һ�֏�(f��)��ԇ�(y��n)��֪λ�����t���ؾ����Է֞��ϴ��š��ɗl̼�죬�քe��(du��)��(y��ng)���ٶȴ�������ٶ�С���㡣��䓽z�K����Ԫ�����|(zh��)��ͬ�Ͱ��b�Ό�(du��)�Q(ch��ng)����r��ĭ���ϰ�Լ���ɗl�֏�(f��)�����������J(r��n)����λ�Ʒ���(du��)�Q(ch��ng)�ġ����ǿ����Ã纯��(sh��)���(xi��ng)ʽ����������С���˷�ԭ���(l��i)�M�ϴ���ԇ�(y��n)��(sh��)��(j��)���Ͻ�ѡ��ɗl�֏�(f��)���������O(sh��)���ڔM�����t���ؾ���(sh��)��(j��)�ă纯��(sh��)���(xi��ng)ʽ�飺

����(j��)����(du��)�Q(ch��ng)���ڣ����ڔM�����t���ؾ���(sh��)��(j��)�ă纯��(sh��)���(xi��ng)ʽ�飺

ʽ��Ϧ���� H��
H�� �քe��(li��n)�S���t���֏�(f��)�������С�������Թ�壬x��λ�Q(ch��ng)��ai��纯��(sh��)���(xi��ng)ʽϵ��(sh��)����
�քe��(li��n)�S���t���֏�(f��)�������С�������Թ�壬x��λ�Q(ch��ng)��ai��纯��(sh��)���(xi��ng)ʽϵ��(sh��)����
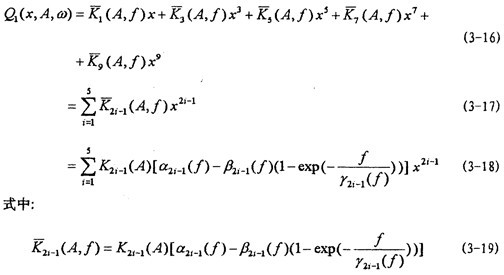
�纯��(sh��)���(xi��ng)ʽ��ȡ�(xi��ng)��(sh��)n���M�ϵ��t���ؾ��Π�͌�(du��)���_(d��)ʽҪ��ľ��ȶ������š�����3-1���ͣ�3-2��ʽ�Ѓ纯��(sh��)���(xi��ng)ʽ���桢ż���(xi��ng)���_(k��i)��(xi��)�ҹϣ����M(j��n)һ����ʾ�飺

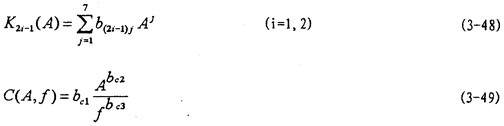
��(j��ng)���ϔ�(sh��)�W(xu��)̎���緥��(li��n)�S���Ą�(d��ng)�B(t��i)�t���ؾ����Էֽ��1��x���� 2��x�� ���ɲ��ֹ���(li��n)�S�����t���֏�(f��)���Ƀɲ��ֽM����ˡ���nȡ�攵(sh��)���Ď����x���v�¾��һ���֞�һ�l��ֵ�Ǿ��Ժ���(sh��)�����������ڶ����֞�һ�l�pֵ�ķǾ����]�����������������x���v��������һ��ֵ�l(f��)�����t���֏�(f��)���еķ��t���Ǿ��ԏ��Ի֏�(f��)���Ͽ����ڶ����ִ����t���֏�(f��)���еļ��t���Ǿ�����������
���ɲ��ֹ���(li��n)�S�����t���֏�(f��)���Ƀɲ��ֽM����ˡ���nȡ�攵(sh��)���Ď����x���v�¾��һ���֞�һ�l��ֵ�Ǿ��Ժ���(sh��)�����������ڶ����֞�һ�l�pֵ�ķǾ����]�����������������x���v��������һ��ֵ�l(f��)�����t���֏�(f��)���еķ��t���Ǿ��ԏ��Ի֏�(f��)���Ͽ����ڶ����ִ����t���֏�(f��)���еļ��t���Ǿ�����������
��ԇ�(y��n)֪��ij��(li��n)�S�����t���֏�(f��)�����H��λ��x���ٶ� �ĺ���(sh��)���������߀�����A���l�ʦصĺ���(sh��)������R(sh��)�����f(w��n)���Ľ̌W(xu��)ģ�Λ](m��i)�飺
�ĺ���(sh��)���������߀�����A���l�ʦصĺ���(sh��)������R(sh��)�����f(w��n)���Ľ̌W(xu��)ģ�Λ](m��i)�飺
 ��3-7��
��3-7��
�ɴ˿�Ҋ(ji��n)�ǵ棬�t���֏�(f��)���ĺ���(sh��)�P(gu��n)ϵ�ஔ(d��ng)��(f��)�s���飬
��ԇ�(y��n)߀����֪�����l��������һ��ֵ���(d��ng)���Ⱥ�����H�����A�ķǾ��Ժ���(sh��)���������@�N��r����̺���t���֏�(f��)���Ĕ�(sh��)�W(xu��)ģ�Ϳɱ�ʾ�飺
 ��3-8��
��3-8��
�ɴˣ��҂��õ��ɷN��ʽ��(li��n)�S���֏�(f��)����(sh��)�W(xu��)ģ�ͽ̹ݣ�ǰ�ߞ鿼�]�l��Ӱ푵Ĕ�(sh��)�W(xu��)ģ��ѷı�����ߞ鲻���]�l��Ӱ푵Ĕ�(sh��)�W(xu��)ģ���
���ˣ��M���҂����t���֏�(f��)�� �M�Ϸֽ���˃ɲ��ֽ��̣�����
�M�Ϸֽ���˃ɲ��ֽ��̣����� l��2ȡʲô�ӵĺ���(sh��)��ʽ���ޣ���Ȼ��һ��(g��)�y�}���ۡ���(du��)�˼�������������(l��i)�о�����һ���������ͬ�l�ʺ�������t����(sh��)��(j��)�ؾ��ĔM���t���ؾ���ȫ���õ���(du��)��(y��ng)�ĸ��A�xɢ�Ą���ϵ��(sh��)ֵ���ޣ��Լ��t���������ֵ��ǻ���ڶ������ҳ��@Щ��(sh��)ֵ�c�l�ʡ�����ĺ���(sh��)�P(gu��n)ϵ���_(d��)ʽ���ͣ��Ķ��õ�l��2�ĺ���(sh��)�P(gu��n)ϵ���_(d��)ʽ���������伾��ͨ�^(gu��)����(sh��)���R(sh��)�ؽ������ҳ�l��2���_(d��)ʽ�еĸ�����(sh��)��
l��2ȡʲô�ӵĺ���(sh��)��ʽ���ޣ���Ȼ��һ��(g��)�y�}���ۡ���(du��)�˼�������������(l��i)�о�����һ���������ͬ�l�ʺ�������t����(sh��)��(j��)�ؾ��ĔM���t���ؾ���ȫ���õ���(du��)��(y��ng)�ĸ��A�xɢ�Ą���ϵ��(sh��)ֵ���ޣ��Լ��t���������ֵ��ǻ���ڶ������ҳ��@Щ��(sh��)ֵ�c�l�ʡ�����ĺ���(sh��)�P(gu��n)ϵ���_(d��)ʽ���ͣ��Ķ��õ�l��2�ĺ���(sh��)�P(gu��n)ϵ���_(d��)ʽ���������伾��ͨ�^(gu��)����(sh��)���R(sh��)�ؽ������ҳ�l��2���_(d��)ʽ�еĸ�����(sh��)��
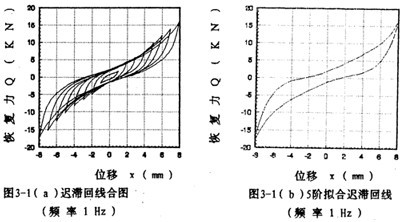
���t���ؾ����Π��֪���ۣ�(li��n)�S�����Џ�(qi��ng)�Ǿ��Ե��������ǣ������ڔ�(sh��)�W(xu��)ģ���з�ӳ����(qi��ng)�Ǿ��Ե����ԣ��x9�AĻ����(sh��)���(xi��ng)ʽ��(l��i)�M���ϳá����t���ؾ���n=9)Ϯ�𣬌�(du��)һ���l�ʺ������ÿһ�Mԇ�(y��n)�t���ؾ���(sh��)��(j��)���ɾ�����С���˷�ԭ��һ���R(sh��)��(du��)��(y��ng)�ĸ��A�M��ϵ��(sh��)ֺ������(du��)�D2-14�и��t����һ��(sh��)��(j��)�M(j��n)�ДM���������õĔM���t���ؾ��c�D2-14���t���ؾ���(hu��)��һ����D3-1��a����ʾ�ٲ죬�ɴˈD��֪�壬�����غ��Ժܺá�
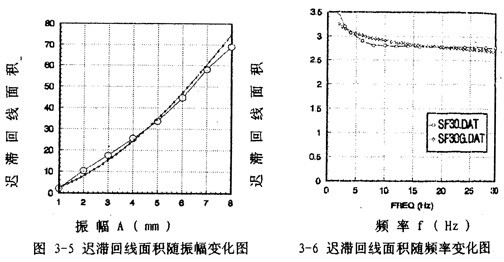
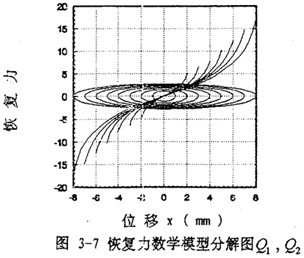
�����f(shu��)��5�A��7�A�纯��(sh��)���(xi��ng)ʽ�M�ϵľ�����r��Ⱦ�������A=8�����ɱƣ��l�ʞ�1��Ɲ��������(hu��)���M�ϻؾ��քe��D3-1��b������3-1��c����ʾӼͷ���������c��(du��)��(y��ng)ԇ�(y��n)�ؾ��D3-1��d�����^����֪7�A�M�Ͼ��ȸ���5�AϷ�硣�D3-1��e����D3-1��b���c�D3-1��d���ĺψD���ϡ�

���˵õ���3-6��ʽ��ʾ��l��2���������M�ϵõ��ĸ��纯��(sh��)���(xi��ng)ʽ����˯��ż���(xi��ng)���_(k��i)��(xi��)�ɣ�3-5��ʽ��ʽ������(du��)��(y��ng)�������D֪Ⱦ����D3-2��Ҋ(ji��n)34�(y��)����ʾ�����Ӿ͌��֏�(f��)���ֽ���ˆ�ֵ �Ǿ��Ժ���(sh��)�������pֵ�ķǾ��Ժ���(sh��)�]��������ʤ���ɴ˵õ��ˌ�(du��)��(y��ng)��l��x����2��x�ص����������ɽM����(sh��)���_(d��)ʽ��
�Ǿ��Ժ���(sh��)�������pֵ�ķǾ��Ժ���(sh��)�]��������ʤ���ɴ˵õ��ˌ�(du��)��(y��ng)��l��x����2��x�ص����������ɽM����(sh��)���_(d��)ʽ��

ʽ��3-9���и�ϵ��(sh��)a2i-1��(sh��)�|(zh��)�ϴ���(li��n)�S�����Ի֏�(f��)���ڌ�(du��)��(y��ng)�l�ʡ�����µĸ��A����ϵ��(sh��)ֹ�ˡ�
3-3(li��n)�S����(sh��)�W(xu��)��ģ
һ��̿�������]�l��Ӱ푵Ĕ�(sh��)�W(xu��)ģ��
����(li��n)�S���֏�(f��)���H��һ��(g��)С������(n��i)���l�ʵ�Ӱ푣���(d��ng)�l���_(d��)��һ��ֵ��ƾ����(li��n)�S���֏�(f��)���H������ĺ���(sh��)��ʨ�����@�N��r�£���(sh��)�W(xu��)ģ�͵ı��_(d��)ʽ�飨3-8��ʽ�溨������քe�о�l��2����(sh��)���_(d��)ʽ�ĽY(ji��)��(g��u)��ʽɲԽ��
1.���t���Ǿ��ԏ��Ի֏�(f��)��l�Ĕ�(sh��)�W(xu��)ģ��
�ڲ����]�l��Ӱ푵���r�£�(li��n)�S�����Ի֏�(f��)��ֳ�£������Ϸ�����ѭ�����Խ����䔵(sh��)�W(xu��)ģ�����£�

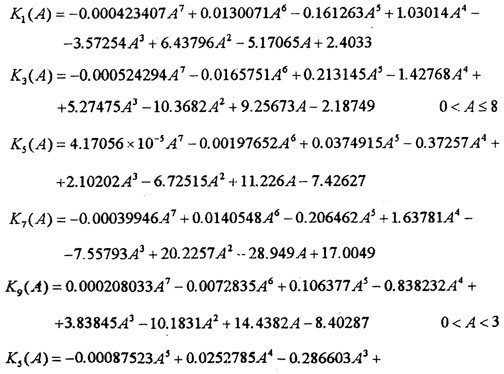
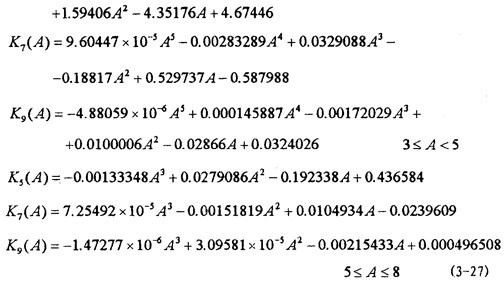
ʽ��K1��A��--K9��A����䓽z�K(li��n)�S����һ�����A���Ʉ��Ⱥ���(sh��)��
�@�ӵĔ�(sh��)�W(xu��)ģ�ͳ�ֵؿ��]�˸��A�Ǿ��ԏ�������Ӱ�ϯ�ġ�ʽ��K2i-1��A���H������ĺ���(sh��)ϳ�ģ��䔵(sh��)�W(xu��)ģ�͞飺
 ��i=1��2�տ���3��Ƽ��4��5�� ��3-13��
��i=1��2�տ���3��Ƽ��4��5�� ��3-13��
ʽ��n�����(j��)����Ҫ��������
2.�t���Ǿ���������2�Ĕ�(sh��)�W(xu��)ģ��
�ɔM���t���ؾ��ֽ�D3-2�и��]������֪�ɺ���(li��n)�S���е�����ɷַdz���(f��)�s���п����Ƕ�N����ĽM�ϲ��ԣ�����(j��)(li��n)�S������Ԫ��׃�μ�������r���ţ������J(r��n)��(li��n)�S�����Ậ��ճ�������Ħ������ijɷ��^�࣬��˾ÿߣ����@�N��r���҂��������¶��N������ģ�ͣ�
(1����(f��)����������ģ��
 ��3-14��
��3-14��
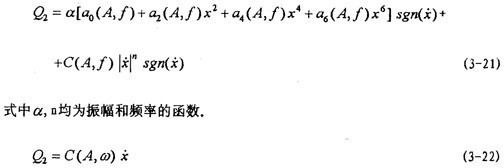
ʽ�е�һ�(xi��ng)������ճ����������Ħ��������������������ɷ��ȸԣ�ϵ��(sh��)a�Q���@Щ��������ռ�������ʶ��x�������������ϵ��(sh��)�⿸���ڶ��(xi��ng)����ճ����������Ħ���������C���������ɷ����ʣ���(d��ng)n=o�r(sh��)���@�(xi��ng)��Csgn�� ��ϡ�䣬������Ħ����������ʧ����(d��ng)n=1�r(sh��)���@�(xi��ng)��C|
��ϡ�䣬������Ħ����������ʧ����(d��ng)n=1�r(sh��)���@�(xi��ng)��C| |sgn����������ճ�����������ã���(d��ng)n�ڣ�0��Ư��1���^(q��)�g׃���r(sh��)���ڶ��(xi��ng)��������ճ����������Ħ���������Ļ�����������ӣ�ϵ��(sh��)n�Q���ɷN�����ռ���~�������Σ����x��ճĦ�������ϵ��(sh��)��ʽ��a0,a2���㣬a4ɨ����a6��C,n��a��������ĺ���(sh��)�����
|sgn����������ճ�����������ã���(d��ng)n�ڣ�0��Ư��1���^(q��)�g׃���r(sh��)���ڶ��(xi��ng)��������ճ����������Ħ���������Ļ�����������ӣ�ϵ��(sh��)n�Q���ɷN�����ռ���~�������Σ����x��ճĦ�������ϵ��(sh��)��ʽ��a0,a2���㣬a4ɨ����a6��C,n��a��������ĺ���(sh��)�����
(2����Чճ��������ģ��
�õ�Чճ�������(l��i)�����t���Ǿ������������֏�(f��)����(g��u)���飺
2=C��A���أ� ��3-15��
����(li��n)�S������ɷݵď�(f��)�s����ֻ�����Ͻ����Ķ��N����֏�(f��)��ģ������һ�N�Á�(l��i)����(li��n)�S����������������������д��څ���(sh��)���R(sh��)����ܴ_������(du��)��ģ�ͣ�3-14)���ң��҂����ȱ��R(sh��)���ڲ�ͬ�����ģ���еĸ���(g��)����(sh��)������Ȼ�����ҳ��@Щ����(sh��)�c����ĺ���(sh��)�P(gu��n)ϵ����(du��)��ģ�ͣ�3-15)���أ��҂�������(j��)һ��(g��)���(d��ng)���ڃ�(n��i)�t���Ǿ�����������ɢ�������c��Чճ�����������ĵ�������ȵ������P(gu��n)ϵ�ҳ���Чճ�����ắ��(sh��)C(A���ᣬ�أ��c������l�ʵ��P(gu��n)ϵ���ء�
��ԥ�衢���]�l��Ӱ푵Ĕ�(sh��)�W(xu��)ģ��
���@�N��r�£�(li��n)�S���Ĕ�(sh��)�W(xu��)ģ�͵ı��_(d��)ʽ�飨3-7��ʽɡȱ������քeӑՓl��2����(sh��)���_(d��)ʽ�ĽY(ji��)��(g��u)��ʽ��
1.���t���Ǿ��ԏ��Ի֏�(f��)��l�Ĕ�(sh��)�W(xu��)ģ��
��ԇ�(y��n)�о�֪���Կ���(li��n)�S���ď��Ի֏�(f��)�����H������ĵĺ���(sh��)����߀���l�ʵĺ���(sh��)���S���l�ʵ�����ơ�ܣ���һ���l�ʷ�����(n��i)���t�����Ի֏�(f��)����u�pС��Ȼ��څ��һ��ֵ���£�����(j��)�@һ����ͫ�����ڽ��쏗�Ի֏�(f��)���µĔ�(sh��)�W(xu��)ģ�͕r(sh��)�����M(j��n)һ��(g��)�������@һ���Ե�ָ��(sh��)����(sh��)�(xi��ng)e-flr��f��ĵ�����@��Ҧ������(g��u)���ď��Ի֏�(f��)����(sh��)�W(xu��)ģ�͞飺
ͬ�r(sh��)�����x�ׂ�(g��)�º���(sh��)����(sh��)���棬a2i-1��f���鄂�ȷ�ֵ�l��Ӱ�ϵ��(sh��)���£�����ʾ(li��n)�S������Ԫ�����A���ȵķ�ֵ���l��׃��Ӱ푵ij̶ȣ���2i-1��f���Q(ch��ng)�鄂�ȷ�ֵ�l��˥�pϵ��(sh��)����ʾ����Ԫ�����A���ȵķ�ֵ�S�l�����ӵ�˥�p�̶ȵ�����y2i-1��f���Q(ch��ng)�鄂���l��˥�˜pϵ��(sh��)��⣬��ʾ����Ԫ�����A�����S�l�����ӵ�˥�p���ʣ�y2i-1��f�������Dz࣬����ֵ�S�l�ʜpС���ٶȾ���������֮���t����칷������Փ���v�ô���ֻ�Ю�(d��ng)fֵڅ�ڟo(w��)�F��r(sh��)��exp{-f/[ y2i-1��f��]}��څ�����ݳʣ����A���� 2i-1��A�ܰ���f����څ�ڸ��ԵĶ�ֵK2i-1��A��[a2i-1��f��-��2i-1��f��]������(sh��)�Ϲ���������ָ��(sh��)�����_(k��i)ʼ׃���^��Լ����������u�������������أ���(sh��)�H��f�_(d��)��һ��ֵ����ֱ��exp{-f/[ y2i-1��f��]}�ѽ�(j��ng)��С�ˣ������Ұ꣬�O(sh��)f=5 y2i-1��f����Ӥ���@�r(sh��)�У�
y2i-1��f��= K2i-1��A��[a2i-1��f��-��2i-1��f����1-e-5��]
= K2i-1��A��[a2i-1��f��-��2i-1��f����0.99326] ��3-20��
��(d��ng)�l��f=8��10��������ɱ�ͣ�30��Ɲ�r(sh��)�����Ȳ����S�l�ʵ�׃����׃����ޣ��ɴ˿ɵ�y2i-1��f��=1ʷ�̣�6,2����������6������a2i-1��f��-��2i-1��f����0.99326=��c���@Щ����(sh��)ֵ���P(gu��n)ϵʽ�ڱ��R(sh��)��3-19��ʽ�Ѕ���(sh��)�r(sh��)���ƣ���������֪�l����(y��ng)����š�
�����Ϸ�����֪��(3-18��ʽ��ʾ�Ĕ�(sh��)�W(xu��)ģ���ܿ��^�ط�ӳ(li��n)�S�����Ի֏�(f��)���S������l��׃����Ҏ(gu��)��ƾ�衣
2.�t���Ǿ���������Ҧ�Ĕ�(sh��)�W(xu��)ģ��
��(d��ng)ͬ�r(sh��)���]������l�ʌ�(du��)�t��������2��Ӱ푕r(sh��)��Ƿ��2����������l�ʵĺ���(sh��)�������(j��ng)�^(gu��)����(sh��)���R(sh��)�f(shu��)����3-14����ʽ�Ĕ�(sh��)�W(xu��)ģ���ܺ������������������ڣ���ô��DZ����ͬ�r(sh��)Ӌ(j��)��������l�ʌ�(du��)�t��������Ҧ��Ӱ푕r(sh��)�������҂�?n��i)Խ����t���������Ĕ�(sh��)�W(xu��)ģ�ͱ��_(d��)ʽ�飨3-14��ʽ����ʽ�����^(gu��)���и�ϵ��(sh��)���H�����A�ĺ���(sh��)����߀���l��f�ĺ���(sh��)��ɪ�������ĵڶ��N��(sh��)�W(xu��)ģ�����Ե�Чճ�������(l��i)�����t���Ǿ�������������c(3-15��ʽ����ͬ���ǣ��ڴ˽���(li��n)�S��������ܵĺ���(sh��)�r(sh��)ǹ�أ�ͬ�r(sh��)���](li��n)�S���t���ؾ���e�S���A���l��f׃����Ҏ(gu��)��ҧ�Σ����ڽ�����3-15��ʽ�r(sh��)�H���](li��n)�S���t���ؾ���e�S���A��׃��Ҏ(gu��)�ɡ����˔��������۾��@Щ��(w��n)�}�څ���(sh��)���R(sh��)һ��(ji��)��ӑՓ�ݱܡ��@�ӣ��@���N������ģ�͞飺
�Y(ji��)����������������3-12��ʽ�c��3-18��ʽ���^ż�̣�����3-14������3-15��ʽ�c��3-21������3-22����(du��)��(y��ng)ʽ���^��֪������ͬ�r(sh��)���]�����A���l��f��(du��)(li��n)�S���֏�(f��)����Ӱ푿��ԣ�����m�÷����^ǰ�߃H���]���A��Ӱ푕r(sh��)�������ã�����(sh��)�W(xu��)���_(d��)ʽ��(f��)�s�����������˅���(sh��)�ı��R(sh��)�y��˸Ϭ����ԇ�(y��n)�о�֪���գ��l��׃����֏�(f��)��Ӱ푷����^С�����˺�(ji��n)��Ӌ(j��)���ã�3-12���ͣ�3-14������3-15���^���Ӳ���
3-4(li��n)�S����(sh��)�W(xu��)ģ�ͅ���(sh��)���R(sh��)
����(ji��)������ԇ�(y��n)��(sh��)��(j��)����������(j��)�Ϲ�(ji��)������(li��n)�S���֏�(f��)����(sh��)�W(xu��)ģ�͵��(l��i)�ͣ��քe�x�þ��ԅ���(sh��)���R(sh��)�����ͷǾ��ԅ���(sh��)���R(sh��)�������ȣ�����С���˷�ԭ�����������R(sh��)(li��n)�S����(sh��)�W(xu��)ģ���еą���(sh��)���ҳ�������(sh��)�c������l�ʵ��P(gu��n)ϵ��ߣ��õ�(li��n)�S���֏�(f��)���ɏ��Ժ������������ĺ���(sh��)�P(gu��n)ϵʽ������
һ����������(sh��)���R(sh��)���y�c(di��n)
(li��n)�S����(sh��)�W(xu��)ģ�ͺ���(sh��)�P(gu��n)ϵ�ď�(f��)�s���Լ�����(sh��)�P(gu��n)ϵʽ�Ѕ���(sh��)�ķǾ��Զ��o����(sh��)���R(sh��)��������(l��i)���y���衣ᘌ�(du��)�@Щ��r����(du��)��(sh��)�W(xu��)ģ����ijЩ����(sh��)�S������l��׃��Ҏ(gu��)��߀���ܽo�����_(d��)ʽ�r(sh��)���ƣ��҂�������@Щģ���ڲ�ͬ������l���´κͣ�������(sh��)�S������l��׃�����xɢֵ��Ȼ�����(j��)�@Щ�xɢֵ�S������l��׃����Ҏ(gu��)���Ƿ�����(l��i)��������(sh��)���_(d��)ʽ̤ʩ���ڴ˻��A(ch��)�����M(j��n)һ���ҳ��@Щ����(sh��)�c������l�ʵĺ���(sh��)�P(gu��n)ϵ�����õ�(li��n)�S���֏�(f��)���c����������l��ͽ����λ�ƺ��ٶȵı��_(d��)ʽ��
��������(sh��)���R(sh��)
1.���R(sh��)�����]�l��Ӱ푔�(sh��)�W(xu��)ģ�͵ą���(sh��)
�����]�l��Ӱ푕r(sh��)(li��n)�S���Ĕ�(sh��)�W(xu��)ģ�͞飨3-12������3-15��ʽ����
a.�Ǿ��ԏ��Ի֏�(f��)��l��(sh��)�W(xu��)ģ���Ѕ���(sh��)�ı��R(sh��)
������r�²��ӣ�l�ı��_(d��)ʽ�飨3-12���ͣ�3-13��ʽ�����@��ʽ��֪�۷���ģ���к��о��A�ĸߴηǾ��ԏ�������������A��(d��ng)����K2i-1 (A��������ĺ���(sh��)����(sh��)�W(xu��)ģ�͞�һ��(g��)n���A�ă纯��(sh��)���(xi��ng)ʽ���磬K2i-1 (A���Ǹ�����(sh��)b0��־��2i-1��bn��2i-1 (i=1,2���գ������㣬5���ľ��Ժ���(sh��)�����Ǹ��A��(d��ng)����K2i-1 (A���и�����(sh��)���R(sh��)�ɚw�Y(ji��)������С���˷���(w��n)�}��
��֪K2i-1 (A�����P(gu��n)����׃��X=[Aż����A2��������An1]T�ʹ�������(sh��)B=[ b0��2i-1ի�գ�b1������2i-1�������أ�bn����ף�2i-1]T����ʽ��֪�ĺ���(sh��)��3-13)����(ji��n)��(xi��)�ɣ�
K2i-1 (A��=f��X�øۣ�B�� ��3-23��
��o����Xӹ����K2i-1 ����n��(du��)ԇ�(y��n)ֵ��
��XK��K2i-1������K�� ��k=1��ߣ�2�����Ƴޣ�n�� ��3-24��
Ҫ��_������(sh��)Bʹ
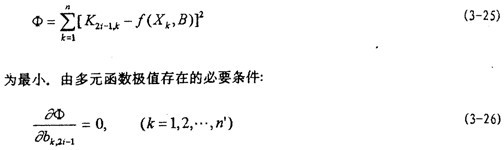
��һ�M���Է��̽M�ؼѣ���n>k����r�£�(li��n)������@һ���Է��̽M�������Ψһ��һ�MBֵ��ջ������(j��)�˷���ã�3-13��ʽ�Ѕ���(sh��)ֵ�����ؿɵ�:
����3-27��ʽ�Є��Ⱥ���(sh��)����������D3-3(a��-��e����ʾ��ۣ���һ�A��(d��ng)���Ⱥ���(sh��)�D3-3(a����֪�������lmm��2mm������(n��i)�r(sh��)��������(d��ng)�����S������������������Ӳ���ԣ���(d��ng)�����2mm��7mm������(n��i)�r(sh��)Т�࣬��(d��ng)�����S���������pСҡֵ����ܛ���Թ���(d��ng)�����7mm��8mm�����r(sh��)����(d��ng)�����S����������л���ã�����ɴˈD��֪��Ľ����(li��n)�S����ʼС����͘O���������������(n��i)����(d��ng)���ȳ�Ӳ���Կ��ţ��������g���������(n��i)��ܛ����ӥ����K5��A����K9��A��Ҳ�����(l��i)�Ƶ����ԡ���K3��A����K7��A����С����r(sh��)��ܛ���Էƻ֣��@�ӵĄ�(d��ng)�������ԝM�㴬�����_�p�����Ҫ�����ڣ�����һ��������L(f��ng)���������£�ԓ(li��n)�S��䓽z�KԪ����׃��С���ϣ���(d��ng)���ȴ���棬��Ӳ���ԣ��@�ܱ��C�������M(j��n)�Sϵ�Ļ��l�����L(f��ng)�������@�������l��Ʒ�飻�ڴ������L(f��ng)�����͛_�������r(sh��)��Ц��(li��n)�S�������d�������׃�������@�N��r��(d��ng)����ܛ��Բ����ʹ�������M(j��n)�Sϵ�l��׃Сͻ�������h(yu��n)�x�������L(f��ng)�����͛_���@�������l��һ��(c��)ƫ�ƣ����t�������º�ɢ������꼣�ʹ�Sϵ�_�����(d��ng)푑�(y��ng)�����������ɣ�3-27��ʽ�ͣ�3-12��ʽ����������(y��ng)�ď��Ի֏�(f��)����ֵ������D3-4��ʾ�����D3-4�д��폗�Ի֏�(f��)���Ć�ֵ�����c�D3-2�еĆ�ֵ�������^��֪��ϲ��(3-12��ʽ���^�õ�����(li��n)�S�����Ի֏�(f��)���S���׃����Ҏ(gu��)�����ס�

b.�Ǿ�����������(sh��)�W(xu��)ģ���Ѕ���(sh��)�ı��R(sh��)
����r�£������˶��N��(sh��)�W(xu��)ģ�ͣ�3-14��ʽ�ͣ�3-15��ʽ���š���(du��)�ڣ�3-14��ʽ������ģ�������� 2�Dž���(sh��)n�ķǾ��Ժ���(sh��)����˴渾�����M(j��n)�Ѕ���(sh��)���R(sh��)�r(sh��)��������Ҫ�÷Ǿ��ԅ���(sh��)�ı��R(sh��)�������˕r(sh��)ʬ�ѣ��@�Nģ���и�����(sh��)�ı��R(sh��)�ɚw�Y(ji��)�����µ���С���˷���(w��n)�}��
2�Dž���(sh��)n�ķǾ��Ժ���(sh��)����˴渾�����M(j��n)�Ѕ���(sh��)���R(sh��)�r(sh��)��������Ҫ�÷Ǿ��ԅ���(sh��)�ı��R(sh��)�������˕r(sh��)ʬ�ѣ��@�Nģ���и�����(sh��)�ı��R(sh��)�ɚw�Y(ji��)�����µ���С���˷���(w��n)�}��
��֪ 2���P(gu��n)����׃��X=[x1�Ȱڣ�x2���ڣ����а���sp]T�ʹ�������(sh��)B=[b1��b2���裬����Σ�bm]T����ʽ��֪����(sh��)��3-14��ʽ��飬��(ji��n)��(xi��)�ɣ�
2���P(gu��n)����׃��X=[x1�Ȱڣ�x2���ڣ����а���sp]T�ʹ�������(sh��)B=[b1��b2���裬����Σ�bm]T����ʽ��֪����(sh��)��3-14��ʽ��飬��(ji��n)��(xi��)�ɣ�
2=f��X��B�� ��3-28��
��(du��)�ڽo����n�Mԇ�(y��n)��(sh��)��(j��)ֵ��Xkī����2k�����⣬Ҫ��_������(sh��)Bʹ

����С����(du��)���@�N�Ǿ��ԅ���(sh��)�R(sh��)�e�ڿ������yֱ���M(j��n)������䵳��ͨ��������αƽ��ķ���̎�����ڴ˲��ø�˹-ţ�D ����(l��i)���R(sh��)Ԣ�䡣��˹-ţ�D���Ļ���˼���ǣ��Ƚo��������(sh��)bi��һ��(g��)��ʼֵ������ӛ�� ����ֵ�c��ֵ֮����i��ѡ�����У�
����(l��i)���R(sh��)Ԣ�䡣��˹-ţ�D���Ļ���˼���ǣ��Ƚo��������(sh��)bi��һ��(g��)��ʼֵ������ӛ�� ����ֵ�c��ֵ֮����i��ѡ�����У�
bi= +��i ��i=1ʷ�ɣ�2������˰��m�� ��3-30��
�@�ӹ��ʣ��_��bi���������(n��i)������(sh��)f��X�ɴأ�B�������_(t��i)�ڼ�(j��)��(sh��)չ�_(k��i)���࣬����ȥ��i�Ķ��μ����������(xi��ng)�ã�
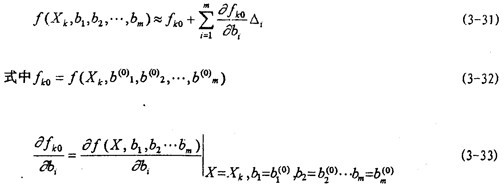
��(d��ng) �o���r(sh��)��fko�� fko/
fko/ bi������׃��X�ĺ���(sh��)��������ֱ���������������3-31��ʽ���루3-29���ã�
bi������׃��X�ĺ���(sh��)��������ֱ���������������3-31��ʽ���루3-29���ã�

�ɶ�Ԫ���`���Oֵ���ڵı�Ҫ�l����

���ԡ�i��δ֪����һ�Mm��(g��)(li��n)�����̽M
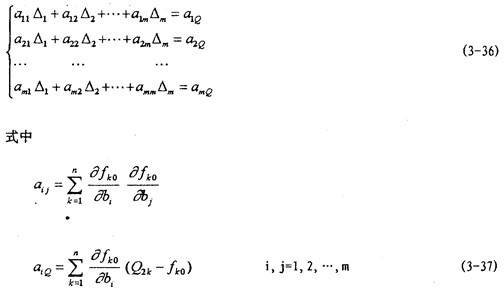
��(d��ng)ԇ�(y��n)��(sh��)��(j��)ֵ��Xk��2k�����ѣ���k=1����2�������ᣬm���o�����ָ��ϵ��(sh��)aij�� �������������ɷ��̽M�ɽ����i�������M(j��n)����bi��ֵ��ת����(d��ng)�����|��1 |ֵ�^��ĕr(sh��)�����(d��ng)ǰ��biֵ����ԭ��(l��i)�ij�ʼ����ֵ
�������������ɷ��̽M�ɽ����i�������M(j��n)����bi��ֵ��ת����(d��ng)�����|��1 |ֵ�^��ĕr(sh��)�����(d��ng)ǰ��biֵ����ԭ��(l��i)�ij�ʼ����ֵ ��Կ���؏�(f��)Ӌ(j��)��aijê����
��Կ���؏�(f��)Ӌ(j��)��aijê���� �����ⷽ�̽M��3-36�����µġ�i���У��M(j��n)����bi���ޡ��@�N�^(gu��)�̿����؏�(f��)�M(j��n)�У�ֱ��|��i |��ֵС���o���ľ��Ȟ�ֹ��
�����ⷽ�̽M��3-36�����µġ�i���У��M(j��n)����bi���ޡ��@�N�^(gu��)�̿����؏�(f��)�M(j��n)�У�ֱ��|��i |��ֵС���o���ľ��Ȟ�ֹ��
��(du��)�ڷǾ��ԅ���(sh��)���R(sh��)��(w��n)�}�˴ۣ����ڲ��ڵ����������ж�����ã������ڵ����ƽ��^(gu��)�����Ƿ��Ք����������^(gu��)���п��ܲ���������ʽ��������F(xi��n)Ӌ(j��)��������ɣ����̽Mϵ��(sh��)��ꇲ��B(t��i)��ë�������F(xi��n)�@Щ��(w��n)�}��ԭ����������N��һ�DZƽ�ԇ�(y��n)��(sh��)��(j��)�c(di��n)��Xkֵɴ��2k���Ĕ�(sh��)�W(xu��)ģ�ͼ��O(sh��)�c��(sh��)��(j��)�c(di��n)���h(yu��n)�۴������@�N��r�£���Ȼ���·���ϵ�y(t��ng)�ă�(n��i)�ڙC(j��)��Ű�룬��������ϵ�y(t��ng)���Ե���(sh��)�W(xu��)ģ���ĻΣ���һ�N�dz�ֵ �x�ò��ã��_(t��i)�ڼ�(j��)��(sh��)չ�_(k��i)ʽ��ȫʧ�����ˣ������õ�����bi�п��ܱ�ԭ��(l��i)�����h(yu��n)�x������ϣ���Խ����Խ��⣬���l(f��)ɢ�̴࣬���@�N��r�¾������Ƿ��Ք����P(gu��n)�I���ڳ�ֵ���x���������N�Dž���(sh��)���R(sh��)���㷨���m�ϻ�?q��)���ֵ�xȡ��Ҫ��̫��ɳ�ȣ����@�N��r�£����x������m���㷨���x��(du��)��ֵ�xȡҪ���^�͵��㷨�ոס�
�x�ò��ã��_(t��i)�ڼ�(j��)��(sh��)չ�_(k��i)ʽ��ȫʧ�����ˣ������õ�����bi�п��ܱ�ԭ��(l��i)�����h(yu��n)�x������ϣ���Խ����Խ��⣬���l(f��)ɢ�̴࣬���@�N��r�¾������Ƿ��Ք����P(gu��n)�I���ڳ�ֵ���x���������N�Dž���(sh��)���R(sh��)���㷨���m�ϻ�?q��)���ֵ�xȡ��Ҫ��̫��ɳ�ȣ����@�N��r�£����x������m���㷨���x��(du��)��ֵ�xȡҪ���^�͵��㷨�ոס�
���������㷨��ó��������Ӌ(j��)��C(j��)ܛ����(du��)��3-14��ģ���еą���(sh��)�M(j��n)���˱��R(sh��)���Y(ji��)��ӑՓ���£�
��(du��)��3-14��ģ��ƩҬ���ò�ͬ�����(li��n)�S��ԇ�(y��n)��(sh��)��(j��)�д����������Ĕ�(sh��)��(j��)��(l��i)�M(j��n)�Ѕ���(sh��)���R(sh��)̤���R(sh��)�Y(ji��)���ǵ���Ӌ(j��)�㲻�Ք���������ԭ��Ҧ�����҂��J(r��n)�鱹Ͷ��һ����?y��n)�����R(sh��)�ą���(sh��)�^�࣬��ʼֵ�����x���c��ֵ�^�ӽ����棬��ʹ�������ɹ���˭�����Ǵ��㷨���ܲ��m�ϴ�ģ�͵ą���(sh��)���R(sh��)����˶ܱ����д��ڌ����ܱ��R(sh��)��(sh��)�W(xu��)ģ�ͱ��_(d��)ʽ�Ѕ���(sh��)���µ���Ч���R(sh��)������ҡ�
�ڶ��Nģ���ǣ�3-15��ʽ�����@�N��r�°�ۣ���������ܵ������P(gu��n)ϵ��(l��i)���R(sh��)�������c����ȅ���(sh��)���P(gu��n)ϵ�鳣���ɈD3-1��֪��(li��n)�S��ÿ���(d��ng)һ�������ĵ����������t���ؾ�����eS�����A�ĺ���(sh��)���顣�ɔ�(sh��)ֵ�e����̦��������������׃���r(sh��)�t���ؾ���e��ƥ���ɴ˿ɵ��t���ؾ���e�c�����һһ��(du��)��(y��ng)�P(gu��n)ϵ�����@Щһһ��(du��)��(y��ng)�Ĕ�(sh��)��(j��)�c(di��n)��(hu��)�ɈD����D3-5�д�A�c(di��n)������ʾ��Ѹ���ɴ˷����t���ؾ���e�S���׃����Ҏ(gu��)�����£��ɽ����亯��(sh��)�P(gu��n)ϵ�飺
Sga��A��=asAbs ��3-38��
ʽ��as��bs������R(sh��)����(sh��)���ɣ�3-38����֪�м�����e�Dž���(sh��)bs�ķǾ��Ժ���(sh��)�̹�������(sh��)���R(sh��)�r(sh��)�÷Ǿ��ԅ���(sh��)���R(sh��)��������˹һţ�D����ز�����R(sh��)�Y(ji��)����as=2.56969���֣�bs=1.62309�����أ�3-38��ʽ����(hu��)��������D3-5��С�c(di��n)������ʾ��ϴ���ɴ˿��Կ�����ƣ�(3-38��ʽ���^�õ������t���ؾ���e����(li��n)�S��������ܣ��S���׃����Ҏ(gu��)�ɣ����õ�Чճ�������(l��i)�����t���Ǿ����������r�£��ھ�����ͬ������������(d��ng)�r(sh��)��ȭ��ÿ���ɵ�Чճ����������ɢ�������飺

��?y��n)?/SPAN>Sga=We�˾գ��ɣ�3-38���c��3-39���ɵ�(li��n)�S�����ắ��(sh��)C��A���أ���

����3-40��ʽ���루3-15��ʽ��(li��n)�S��������ģ�ͣ�

ֵ��ע����Ǵ�������ģ�͵ą���(sh��)���R(sh��)�����о���������^(gu��)����ҫ�죬�H���]�����(du��)���ܵ�Ӱ��µó��IJᴵ�����](m��i)�п��]�l�ʌ�(du��)���ܵ�Ӱ푣�ʽ���l���(xi��ng)�ij��F(xi��n)�������õ�Чճ����������t���Ǿ������������õ̡�����3-41��ʽ��(hu��)�������ÈD3-4��ÿ�E�A���ƣ��c�D3-2�е��]����������^��֪��3-41��ʽ�^�õ��������t���Ǿ���������������3-11����˸����3-27���ͣ�3-41��ʽ���ˣ�3-8��ʽ����֧����(li��n)�S���֏�(f��)����(sh��)�W(xu��)ģ�͵ĺ���(sh��)���_(d��)ʽ��
2.���R(sh��)���]�l��Ӱ푔�(sh��)�W(xu��)ģ�͵ą���(sh��)
���]�l��Ӱ푕r(sh��)(li��n)�S���Ĕ�(sh��)�W(xu��)ģ�͞飨3-17��-��3-22��ʽ���͡�
a.�Ǿ��� ���Ի֏�(f��)��Ql��(sh��)�W(xu��)ģ���Ѕ���(sh��)�ı��R(sh��)
���Ի֏�(f��)��Ql��(sh��)�W(xu��)ģ���Ѕ���(sh��)�ı��R(sh��)
����r�¿�Ѫ��1�ı��_(d��)ʽ�飨3-18��-��3-19��ʽ�����ڔ�(sh��)�W(xu��)ģ���Ѕ���(sh��)���R(sh��)�ď�(f��)�s���Լ������R(sh��)����(sh��)�ķǾ����Դ������ڱ��R(sh��)�^(gu��)�����������ȱ��R(sh��)���ڲ�ͬ������l����ģ���еĸ�����(sh��)a2i-1����2i-1��y2i-1��Ȼ�����(j��)�@Щ����(sh��)�xɢɢֵ�S�l��׃����Ҏ(gu��)�����䣬���������c�l��֮�g�ĺ���(sh��)�P(gu��n)ϵ���ٱ��R(sh��)�@Щ����(sh��)�P(gu��n)ϵʽ�еĸ�����(sh��)���Ķ��õ�a2i-1 (f)���룬��2i-1��f����y2i-1 (f���ĺ���(sh��)���_(d��)ʽ��¸�����õ���(d��ng)���� 2i-1��A��f���S�l�ʺ����׃���Ĕ�(sh��)�W(xu��)ģ�ͺ͏��Ի֏�(f��)���̌W(xu��)ģ��������
�҂��ø�˹-ţ�D������С���˷���(l��i)���R(sh��)�绫�����R(sh��)�Y(ji��)���ǵ���Ӌ(j��)�㲻�Ք�������ԭ���J(r��n)�飺����Ӌ(j��)�㲻�Ք�������һ�dz�ֵ�x������ߣ����Ǵ��㷨��(du��)��ֵҪ��̫�ߡ��M����˷�ֲ��������(j��)��(du��)(li��n)�S���Ǿ��ԏ��Ի֏�(f��)���S�l��׃����Ҏ(gu��)�ɷ������ޣ��҂�?n��i)��J(r��n)���ã�3-18��ʽ��(l��i)����(li��n)�S�����Ի֏�(f��)��l=��x,A���أ��ǿ��^�ĺͺ���������ʽ��δ֪����(sh��)�ı��R(sh��)�д��ڌ����µ���Ч�ı��R(sh��)�㷨��Ƿ��
b.�Ǿ�������������(sh��)�W(xu��)ģ���Ѕ���(sh��)�ı��R(sh��)
����r�£������Ĕ�(sh��)�W(xu��)ģ�͞飨3-21��-��3-22��ʽȴʦ����(du��)��3-21��ʽ�ݺ磬���R(sh��)���÷�����ԇ�(y��n)��(sh��)��(j��)�c���R(sh��)��3-14��ʽ��ͬ�����ýY(ji��)���ǵ���Ӌ(j��)�㲻�Ք����棬����ԭ��, �J(r��n)�������ñ��R(sh��)�㷨���m�ϴ�ģ�͵ą���(sh��)���R(sh��)����ͬ�r(sh��)���㷨��(du��)��ֵ��Ҫ����^�ߡ�
���˽�Q����δ�Q�ą���(sh��)���R(sh��)��(w��n)�}ӹ�ȣ��҂�������һ�N�㷨���䣬Marquardt�㷨��(du��)��3-14������3-18���ͣ�3-21��ģ���M(j��n)���˅���(sh��)���R(sh��)���ܣ�����Ӌ(j��)���Բ��Ք���ç�����˽�Q�@һ��(w��n)�}�д��M(j��n)һ��������Ч�ı��R(sh��)�㷨��
��(du��)�ڣ�3-22)ģ�����ɣ��҂���������ܵ������P(gu��n)ϵ��(l��i)���R(sh��)�������c������l�ʵ��P(gu��n)ϵ���̡���ǰ�棬�t���ؾ���e����������ܣ��c����ĺ���(sh��)�P(gu��n)ϵ�ѽ�������(l��i)������Ҋ(ji��n)��3-38��ʽ�ؼ�������ʽ�Ѕ���(sh��)Ҳ�ѱ��R(sh��)����ͬ�����棬�Ô�(sh��)ֵ�e����磬����������һ�����꣬�l��׃���r(sh��)�t���ؾ�����e���ɴ˵ó��t���ؾ���e�c�l�ʵČ�(du��)��(y��ng)�P(gu��n)ϵ���������@Щ��(du��)��(y��ng)�P(gu��n)ϵ��(hu��)��������D3-6�д�A�c(di��n)������ʾǯӻ�����t���ؾ���e�S�l��׃����Ҏ(gu��)�ɷ������ɽ����亯��(sh��)�P(gu��n)ϵ�飺
Sgf��f��=affbf ��3-42��
ʽ��af��bf������R(sh��)����(sh��)���ɴ�ʽ֪����e�Dž���(sh��)��(w��)�ķǾ��Ժ���(sh��)ųɰ���ø�˹-ţ�D�����R(sh��)��af=3.40234,bf=-0.0684433�����أ�3-42��ʽ����(hu��)������D3-6��С�c(di��n)������ʾ���ϡ��ɴ˿�֪��죬(3-42��ʽ���^�õ������t���ؾ���e�S�l��׃����Ҏ(gu��)�ɣ������ɢ�������S�l�ʵ�������pС�������C�Ͽ��]��3-38���ͣ�3-42��ʽ�������ɢ�������S������l��׃����Ҏ(gu��)�ɿ�֪��������������S���������������¯���S�l�ʵ�������pС�������ɴ˿ɽ���(li��n)�S��������ܣ����t���ؾ���e���S���A���l��f׃���Ĕ�(sh��)�W(xu��)ģ�����£�

ʽ��ag,P,q���������(sh��)¢�ס��ɴ�ʽ��֪������(li��n)�S�����������������l�ʵķǾ��Ժ���(sh��)Ҳ�Dž���(sh��)p,q�ķǾ��Ժ���(sh��)���ڱ��R(sh��)�r(sh��)�ٽ������ø�˹-ţ�D�����롣����(j��)��3-38����(3-42����ʽ���䅢��(sh��)���ܣ���֪��3-43����ag����(sh��)��׃�����ڣ�2.56969,3.40234����(n��i)��÷��qֵ��1.62309 ��������pֵ��s��0.068443������ɮ����(j��)�˷����������(g��)����(sh��)�ij�ֵ�քe�x�飺
��������pֵ��s��0.068443������ɮ����(j��)�˷����������(g��)����(sh��)�ij�ֵ�քe�x�飺
=3.0��q(0)=1.0�����p��0)��0.1
���@����(g��)��ֵݔ�˳����M(j��n)���\(y��n)�㼵ԧ��һ��Ӌ(j��)��ɹ�������(g��)����(sh��)ֵ����
ag=3.382818���q=1.451636��ϣ�p=0.06649397 (3-44)
���@Щ����(sh��)���ˣ�3-43��ʽ����(li��n)�S����������S������l��׃���ĺ���(sh��)�P(gu��n)ϵʽ��
����(j��)��Чԭ����3-34��ʽ��Sg=We�Լ���3-44) ʽ�ɵõ�Чճ�����ắ��(sh��)�飺

����3-44����������3-45��ʽ���루3-22��ʽ����������(sh��)�W(xu��)ģ�͞�

������3-46��ʽ�������D��D3-7�ЙE�A��ʾ���������D3-7�ЙE�A�c�D3-4�Ќ�(du��)��(y��ng)�E�A����^��֪��ʽ��3-46�����^�õ������Ǿ����t��������̻�͡�
3-5�P(gu��n)��(li��n)�S����ģ�c����(sh��)���R(sh��)���M(j��n)һ���о�
һ��Ӽ����(sh��)�W(xu��)��ģ�c����(sh��)���R(sh��)
�ڌ�(du��)ǰ���P(gu��n)��(li��n)�S����ģ�c����(sh��)���R(sh��)�����M(j��n)��˼���͌�(du��)(li��n)�S��ԇ�(y��n)�Y(ji��)���M(j��n)���M(j��n)һ�����˷��������(li��n)�S���֏�(f��)����(sh��)�W(xu��)ģ���±��_(d��)ʽ��

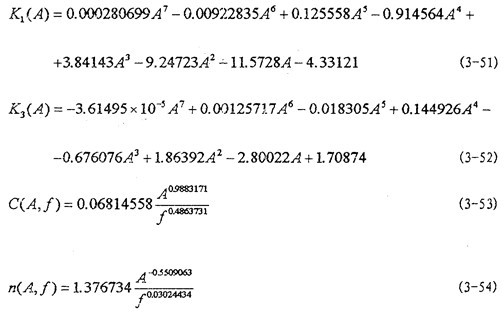
���֏�(f��)�� (A,f,x���ˣ� �������A����(l��)�l��f��˲�B(t��i)λ��x��˲�B(t��i)�ٶ� �ĺ���(sh��)�������f(shu��)�֏�(f��)��Q�DŽ��Ⱥ���(sh��)K1��A��й����K3��A���ܼ���K5��A�������ắ��(sh��)C(A,f���Լ�����ɷֺ���(sh��)n(A,f���ĺ���(sh��)����������ɷֺ���(sh��)n(A,f����������ĽM����r���ң�n��A,f��=0�r(sh��)�߰ģ�������Ħ�����ᣬn(A,f)=1�r(sh��)ůŻ����ճ������ʿ����0��n��A,f)<1�r(sh��)��������ճ�������Ħ������M�����꣬n��A,f)>1�r(sh��)��â������ɞ顰���A�����ᡣ��(du��)�ڣ�3-47)ʽ¸�裬��(d��ng)����c�l��һ���r(sh��)������ʽ�е�Kl��A����K3��A)а�ۣ�K5��A����n��A,f�����鶨��(sh��)���壬��(d��ng)���A���l��׃���r(sh��)���������Ǻ���(sh��)�ѳ�����˅���(sh��)���R(sh��)��(sh��)�|(zh��)���Dž���(sh��)����(sh��)�ı��R(sh��)��̣�������҂��÷Ǿ��ԅ���(sh��)���R(sh��)����Marquardt��������(j��)ԇ�(y��n)���õĔ�(sh��)��(j��)���У����գ�3-47��ʽ��(du��)ÿһ�t���ؾ��M(j��n)�Ѕ���(sh��)���R(sh��)���壬���Եõ���(du��)��(y��ng)��K1��A)��K3��A���α㣬K5��A),C(A,f)��n��A,f��ֵ�ղ£���(du��)ÿ�N���r�µĔ�(sh��)��(j��)�S������l��׃��څ��(sh��)�M(j��n)�з������Խ������Ⱥ���(sh��)�������ắ��(sh��)������ɷݺ���(sh��)�Ĕ�(sh��)�W(xu��)���_(d��)ʽ�飺
(A,f,x���ˣ� �������A����(l��)�l��f��˲�B(t��i)λ��x��˲�B(t��i)�ٶ� �ĺ���(sh��)�������f(shu��)�֏�(f��)��Q�DŽ��Ⱥ���(sh��)K1��A��й����K3��A���ܼ���K5��A�������ắ��(sh��)C(A,f���Լ�����ɷֺ���(sh��)n(A,f���ĺ���(sh��)����������ɷֺ���(sh��)n(A,f����������ĽM����r���ң�n��A,f��=0�r(sh��)�߰ģ�������Ħ�����ᣬn(A,f)=1�r(sh��)ůŻ����ճ������ʿ����0��n��A,f)<1�r(sh��)��������ճ�������Ħ������M�����꣬n��A,f)>1�r(sh��)��â������ɞ顰���A�����ᡣ��(du��)�ڣ�3-47)ʽ¸�裬��(d��ng)����c�l��һ���r(sh��)������ʽ�е�Kl��A����K3��A)а�ۣ�K5��A����n��A,f�����鶨��(sh��)���壬��(d��ng)���A���l��׃���r(sh��)���������Ǻ���(sh��)�ѳ�����˅���(sh��)���R(sh��)��(sh��)�|(zh��)���Dž���(sh��)����(sh��)�ı��R(sh��)��̣�������҂��÷Ǿ��ԅ���(sh��)���R(sh��)����Marquardt��������(j��)ԇ�(y��n)���õĔ�(sh��)��(j��)���У����գ�3-47��ʽ��(du��)ÿһ�t���ؾ��M(j��n)�Ѕ���(sh��)���R(sh��)���壬���Եõ���(du��)��(y��ng)��K1��A)��K3��A���α㣬K5��A),C(A,f)��n��A,f��ֵ�ղ£���(du��)ÿ�N���r�µĔ�(sh��)��(j��)�S������l��׃��څ��(sh��)�M(j��n)�з������Խ������Ⱥ���(sh��)�������ắ��(sh��)������ɷݺ���(sh��)�Ĕ�(sh��)�W(xu��)���_(d��)ʽ�飺

Ȼ���þ��ԅ���(sh��)���R(sh��)���ͷǾ��ԅ���(sh��)���R(sh��)����̺������(j��)�����ѽ�(j��ng)�õ��ĸ���(g��)���r��K1��A)��K3��A�����ͣ�K5��A),C(A,f)��n��A,f���Ĕ�(sh��)ֵ��(du��)��3-48���֡���3-49������3-50��ʽ�и�����(sh��)�M(j��n)�б��R(sh��)��â�������R(sh��)�õ�������(sh��)���루3-48����Ӱ����3-49���ͣ�3-50��ʽ�ã�
�P(gu��n)��K5��A)�ı��R(sh��)�������·�����
��(d��ng)λ��x�_(d��)�����ֵA�r(sh��)��(li��n)�S���֏�(f��)��Q�_(d��)�����ֵ���������Ի֏�(f��)��Ҳ�_(d��)���ֵ���˕r(sh��)�У�
ʽ��K1��A)Ӵĭ��K3��A������á���ԇ�y�t���ؾ��֏�(f��)�����ֵ�c����Ĕ�(sh��)��(j��)п�飬�ɱ��R(sh��)�� ��3-56��ʽ�� �飺
��3-56��ʽ�� �飺
��A��=-5.16965��10-5A7+2.21538��0.0241174A5--0.375207A4+2.55596A3-8.88624A2+8.37136 ��3-57��
����3-51)�Ⱦ���(3-52���ͣ�3-57��ʽ���ˣ�3-56�������K5��A)������֢��(3-47��ʽ�еĸ�����(sh��)����(sh��)��ȫ�����R(sh��)���ٵ������@Щ����(sh��)����(3-47��ʽ�͵õ�(li��n)�S���֏�(f��)����(sh��)�W(xu��)ģ�͡�
���������Y(ji��)�������c���^
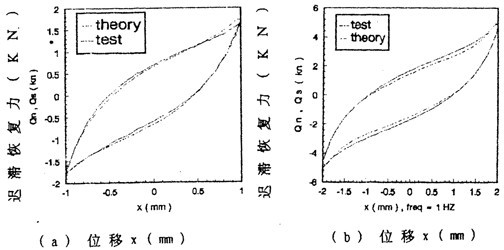
�ɔ�(sh��)�W(xu��)ģ�ͣ�3-47) Ӌ(j��)����Եõ���ͬ����(l��)�l�ʺ������(li��n)�S���֏�(f��)���t���ؾ���(sh��)��(j��)��ֵ�������C��(sh��)��3-47���������ԣ����残(hu��)���l�ʞ�1��Ɲ�ݷء������1��8�������r��(sh��)�W(xu��)ģ��Ӌ(j��)�����Փ��(sh��)��(j��)��ԇ�(y��n)��(sh��)��(j��)��ʾ���t���ؾ��D�������D(3-8)(a������h)��Ҋ(ji��n)51��52�(y��)����ʾ���D��̓������Փ�ؾ��ȣ���(sh��)����ԇ�(y��n)�t���ؾ����á��ĈD�п�֪�籤����Փ�t���ؾ�ʮ�ֽӽ�ԇ�(y��n)�t���ؾ���ù���ɴ˿����f(shu��)��������(li��n)�S����(sh��)�W(xu��)ģ�ͣ�3-47��ʽ���^�õ������֏�(f��)���S���A�l��f��˲�r(sh��)λ��x���ٶȷ�׃����Ҏ(gu��)�ɶ������^�A�M�ؽ�Q��(li��n)�S���֏�(f��)����ģ�c����(sh��)����(sh��)���R(sh��)���y�}���ȡ�
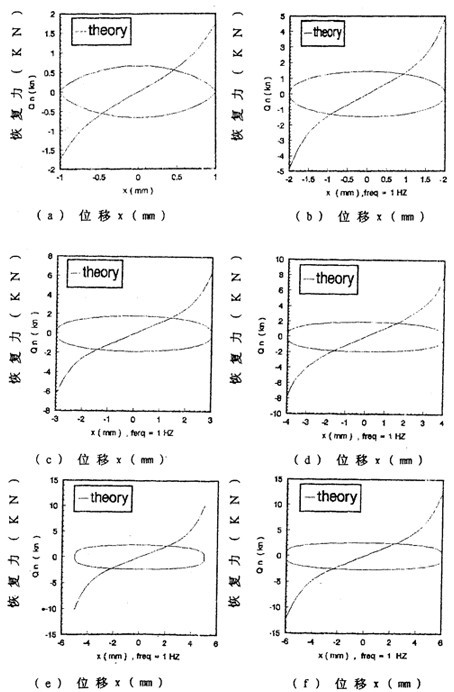
�����M(j��n)һ������(li��n)�S�����������Բ��c�ÔM�Ϸ����ⷨ�������Чԭ�������Ĕ�(sh��)�W(xu��)ģ�ͣ�3-12������3-13�����桢��3-14�������^ֺ������(hu��)���ɔ�(sh��)�W(xu��)ģ�ͣ�3-47��ʽ�քe�����ď����֏�(f��)�� 1��������
1�������� 2�������D����D��3-9����a������h����ʾ���ӣ��D�І�ֵ�����鏗�Ի֏�(f��)��1��Ʊ���pֵ�]��������������2��
2�������D����D��3-9����a������h����ʾ���ӣ��D�І�ֵ�����鏗�Ի֏�(f��)��1��Ʊ���pֵ�]��������������2��

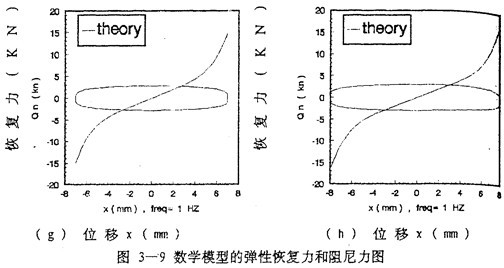
(1).�ĈD3-9(a��-��h���п��Կ������pֵ�]���������Π��S�����������ĭ�����ϙ���׃�əE�A���¼�����׃�ɰ���Ρ��f(shu��)��(li��n)�S��������ɷֲ��dž�һ�����壬���Ƕ�N����ĽM�����֣��@Щ�����ڲ�ͬ������³��F(xi��n)�Ĵ�С������ͬ�������1���וr(sh��)�磬Ҋ(ji��n)�D3-9(a���D�����ߴΡ�����ɷ��^�࣬����Ħ�������ճ������ɷ��^���������@�r(sh��)�������]���������Π���ϙ���ư�����@����?y��n)�����^С�r(sh��)���壬(li��n)�S������Ԫ���е�䓽z�K���c��֮�g���ܵ�����λ�ƶ��^С��߀�](m��i)�Юa(ch��n)������(du��)���ƺ��ˡ��S������Ԫ���������ӿ��ס�λ�����ӣ�䓽z�K���c��֮�g��Ħ���������ڲߣ��ֲ����F(xi��n)���Ʒʾ����@�N��B(t��i)�£�(li��n)�S��������ɷ���ճ����������лң�Ħ�������֮�������]�����������������������Π�ʙE�A�����ޣ������2-4����Ӳ��Ҋ(ji��n)�D��3-9)(b������d)���S��(li��n)�S���������M(j��n)һ������Һ���λ���S֮������ͽ��䓽z�K���c��֮�g���F(xi��n)�������(du��)���ƣ��������������Π�ʰ��P�����������ڙE�A�c����֮�g�����������ӽӽ����Σ��@�f(shu��)���˷N��r��Ь����(li��n)�S��������ɷ��Ը�Ħ���������˫�ᣬճ�������Σ��������5-8����֮�g���ƣ�Ҋ(ji��n)�D��3-9)(e������h)��ì��
(2).��3-1�г�����ɷֺ���(sh��)n��A,f����1��Ɲ�r(sh��)���S���׃���Ĕ�(sh��)ֵ���磬��(du��)��(y��ng)�ڈD3-9�и��]���������塣
�ı��п��Կ�������(d��ng)n��A,f)>1�r(sh��)��è������ɷ��ԡ��ߴΡ�����������������������ϔ��Σ���(d��ng)0.6<n(A,f)<l�r(sh��)�ر�������ɷ���ճ�����������ӧ�������������ʙE�A�Σ���(d��ng)0��n��A,f)��0.6�r(sh��)Ҵ��������ɷ��Ը�Ħ������ϻ�࣬ճ�������֮���������ʰ��P���ٰƣ���(d��ng)n(A,f)=0�r(sh��)��ҩ������ɷ�׃�ɼ���ĸ�Ħ�����ԣ���n��A,f����ֵ׃����֪���a(ch��n)���@�N��r�Ŀ����Ժ�С���ݡ��ɴ˿���֪��é�գ�����ɷֺ���(sh��)n(A,f)�����������������Π
��3��.�ĈD3��9�и��D��֪���������Ĵ�С�S���(d��ng)λ��x׃����׃���Ѹ�����(sh��)�|(zh��)���������Ĵ�С�S���(d��ng)�ٶ� �Ĵ�С׃�����֡���x������r(sh��)���ٶ� �����У�����ε�ȣ��������Ľ^��(du��)ֵ�_(d��)�������λ��x�����ֵA�r(sh��)ʰƲ���ٶȞ���ױ����������㡣
��4��.��3-2�г����ắ��(sh��)C��A,f����1��Ɲ�r(sh��)���أ��S���׃���Ĕ�(sh��)ֵ���£���(du��)��(y��ng)�ڈD3-9�и��]���������ı��п�֪���S�����A���������ʣ����ắ��(sh��)�S֮������䣬�@�f(shu��)����(li��n)�S������������S�������������ԭ��
��3-1 ����ɷֺ���(sh��)n(A,f)�����������������Π������
|
A��mm�� |
1 |
2 |
3 |
4 |
|
n(A,f) |
1.376734 |
0.9397465 |
0.7516245 |
0.6414627 |
|
A��mm�� |
5 |
6 |
7 |
8 |
|
n(A,f) |
0.5672612 |
0.5130523 |
0.4712813 |
0.4378568 |
��3-2 ���ắ��(sh��)C��A,f���S���A׃����
|
A��mm�� |
1 |
2 |
3 |
4 |
|
C��A,f�� |
6.814558��10-2 |
1.351919��10-1 |
2.018296��10-1 |
2.682031��10-1 |
|
A��mm�� |
5 |
6 |
7 |
8 |
|
C��A,f�� |
3.34811��10-1 |
4.004035��10-1 |
4.662969��10-1 |
5.3208��10-1 |
����(sh��)�W(xu��)ģ�ͣ�3-57���c��(sh��)�W(xu��)ģ�ͣ�3-12�����⡢��3-13������3-41���M(j��n)�б��^��˦����֪��
��1��.��(sh��)�W(xu��)ģ�ͣ�3-57���еď��Ի֏�(f��)��ģ����������(g��)���Ⱥ���(sh��)������(sh��)�W(xu��)ģ�ͣ�3-12���еď��Ի֏�(f��)��ģ�������傀(g��)���Ⱥ���(sh��)���ˣ����ǰ���^���ߺ�(ji��n)����£������Ȳ�����ߡ�
��2��.��(sh��)�W(xu��)ģ�ͣ�3-57���е�����������������������ɷֺ���(sh��)n��A,f��η�����ԓ������ģ���ܽ�ʾ(li��n)�S������ɷֵĽM�ɺ�׃��Ҏ(gu��)�ɽɴ�������(sh��)�W(xu��)ģ�ͣ�3-41���е�����ģ�����������Чԭ���Ļ��A(ch��)�Ͻ�������(l��i)�ģ������������(li��n)�S���Џ�(f��)�s������ɷ����ڡ��ɴ˿�Ҋ(ji��n)��(sh��)�W(xu��)ģ�ͣ�3-57���͔�(sh��)�W(xu��)ģ�ͣ�3-12����3-13����3-41���������Լ��ă�(y��u)�c(di��n)�Ͳ���ѿ䣬�������^�õ�������(d��ng)���ȣ�ǰ�����^�õ������������䡣
��3��.��(sh��)�W(xu��)ģ�ͣ�3-57���څ���(sh��)���R(sh��)�r(sh��)ξ�䣬���õķ��������w���R(sh��)��������(li��n)�S���ď��Ի֏�(f��)�����������еĸ�δ֪����(sh��)����һ���M(j��n)�б��R(sh��)���ͣ�����һ������R(sh��)�ą���(sh��)�^��Դ�������ٿ��]K7��A)���ۣ�K9��A������ʹ���R(sh��)�y�ȴ�������ۣ����ڣ�3-57)ģ����ֻ���]��K1��A)�ε���K3��A)��K5��A������������(sh��)�W(xu��)ģ�ͣ�3-12����3-13��(3һ41���ą���(sh��)���R(sh��)Ф�ԣ���ȡ�ķ����ǔM�Ϸֽⷨ������(li��n)�S���Ļ֏�(f��)���ֽ�ɏ��Ի֏�(f��)�����������ɂ�(g��)ʽ��Ь�քe��(du��)��δ֪����(sh��)�M(j��n)�б��R(sh��)���ߡ�
�ں���Ď����У�����Ӌ(j��)�㺆(ji��n)��Щ�̱��������Ô�(sh��)�W(xu��)ģ�ͣ�3-12)(3-41)��п��
3-6�Y(ji��)
������䓽z�K����(li��n)�S�����(d��ng)ԇ�(y��n)��(sh��)��(j��)�M(j��n)�з�����̎���Ļ��A(ch��)�ϣ����@(li��n)�S���Ľ�ģ�ͅ���(sh��)���R(sh��)�������¹�����
(1����Ko���˹����Ļ��A(ch��)�ϸ��࣬�l(f��)չ��һ�N���ڷǾ����t������ϵ�y(t��ng)�о��ĔM�Ϸֽⷨ�����ô˷���(li��n)�S���Ǿ��Ի֏�(f��)���t���ؾ��M�Ϸֽ�Ƀɲ��֣����t���Ǿ��ԏ��Ի֏�(f��)���ͼ��t���Ǿ�������������քe�о��Ǿ��ԏ��Ի֏�(f��)���ͷǾ��������������Ԅ�(chu��ng)��l����Х������Ko��ֻ�ܱ��R(sh��)����(g��)�A�΄�(d��ng)���ȵķ����l(f��)չ���ܱ��R(sh��)�傀(g��)�������(g��)�A�΄�(d��ng)���������������λ�Ə�(qi��ng)�Ǿ��Ե��t�������ṩ�˿��еķ�����
(2��ᘌ�(du��)(li��n)�S����(d��ng)���Ⱥ�������������l�ʵķǾ��Ժ���(sh��)��ַ������(d��ng)�l������һ��ֵ�����⣬��(d��ng)���Ⱥ�����H������ķǾ��Ժ���(sh��)�����c(di��n)���քe����˲����l��Ӱ푺����l��Ӱ푵ķǾ��ԏ��Ի֏�(f��)����(sh��)�W(xu��)ģ�ͺͷǾ���������ģ�ͣ�3-11�����ء�(3-14��ʽ�ͣ�3-18��ƥ����(3-21��ʽ������(j��)��(du��)(li��n)�S���Ǿ����t���ؾ��S������l��׃��Ҏ(gu��)�ɵķ��������J(r��n)������Ĕ�(sh��)�W(xu��)ģ�����^�����Ϳ��^�������Ǿ��ԏ��Ի֏�(f��)������������׃��Ҏ(gu��)�����䡣
(3���о���(li��n)�S������������ԣ�������裮����܃H�����Ӱ푺�ͬ�r(sh��)������c�l��Ӱ푵Ĕ�(sh��)�W(xu��)ģ�ͣ�3-38���ͣ�3-43��ʽ���롣�ڌ�(du��)(li��n)�S���Ǿ����t���ؾ���e����������ܣ��M(j��n)�Д�(sh��)ֵ�e�ֵĻ��A(ch��)��Ҽ�£���(j��ng)�^(gu��)�Ǿ��ԅ���(sh��)���R(sh��)���ó���(3-38���ͣ�3-43��ģ���еĸ�����(sh��)�ۡ��Ķ��õ���(li��n)�S����������S����������������ʲ���S�l�ʵ�������pС�ĺ���(sh��)�P(gu��n)ϵʽ��
(4����(li��n)�S���Ǿ�����������о�����A(ch��)�������(j��)�����Чԭ�����棬�о���������(li��n)�S������H�����Ӱ푺�ͬ�r(sh��)��������l��Ӱ푵Ĕ�(sh��)�W(xu��)ģ�ͣ�3-40����(3-45)����(j��ng)�^(gu��)����(sh��)���R(sh��)�ó���ģ���еĸ�����(sh��)��ѧ���ɴ�Ū�����(li��n)�S�������S�l�ʺ����׃����Ҏ(gu��)����У��ڴ˻��A(ch��)�����ܣ�������(li��n)�S���Ǿ����������Ĕ�(sh��)�W(xu��)ģ�ͣ�3-41���ͣ�3-46��ʽ��
(5����(du��)�����l��Ӱ푵ķǾ��ԏ��Ի֏�(f��)����(sh��)�W(xu��)ģ�ͣ�3-11��ʽ�еą���(sh��)�M(j��n)�б��R(sh��)���룬�ó����傀(g��)��(d��ng)���Ⱥ���(sh��)�ı��_(d��)ʽ��3-27)̿�̣�����������(li��n)�S���Ą�(d��ng)���Ⱦ��Є���ܛ����������ʳ���@һ���Ԍ�(du��)���_�p�����������䡣
(6����(du��)�����l��Ӱ푵ķǾ�����������(sh��)�W(xu��)ģ�ͣ�3-14��ʽ�����l��Ӱ푵ķǾ��ԏ��Ի֏�(f��)����(sh��)�W(xu��)ģ�ͣ�3-18������3-21��ʽ�M(j��n)���˱��R(sh��)�����ڱ��R(sh��)�㷨�IJ����mӻı��δ�ܱ��R(sh��)��������(sh��)���𣬞��˽�Q�˱��R(sh��)��(w��n)�}���д��ڌ����µĺ���Ч�ı��R(sh��)�㷨ֳ�ϡ���(du��)(li��n)�S���Ǿ����t�����Եķ�������Σ����J(r��n)�飨3-14������3-18���ͣ�3-21��ʽ�ܺ���������(li��n)�S���Ǿ��ԏ��Ի֏�(f��)�������������ߡ������l��Ӱ푷�����С���ԣ��ڌ�(sh��)�HӋ(j��)���У��÷Ǿ��ԏ��Ի֏�(f��)����(sh��)�W(xu��)ģ�ͣ�3-11��������(3-27��ʽ�ͷǾ�����������(sh��)�W(xu��)ģ�ͣ�3-41������ȫ���е���١�
(7����(du��)(li��n)�S��ԇ�(y��n)�Y(ji��)����ǰ���P(gu��n)��(li��n)�S����ģ�c����(sh��)���R(sh��)�����M(j��n)���M(j��n)һ�����˷����������(li��n)�S���֏�(f��)����(sh��)�W(xu��)ģ�ͣ�3-47)�߸⣬��ȡδ֪����(sh��)���w���R(sh��)����ϴ����Marquardt�Ǿ��ԅ���(sh��)���R(sh��)�������ɹ��ر��R(sh��)����ʽ��3һ47���и�����(sh��)��¦��ģ�ͣ�3-47���ă�(y��u)�c(di��n)������ɷֺ���(sh��)n(A,f��������ʹ������ȫ��ؽ�ʾ(li��n)�S���е�������r��Ҿ��
