Õ∆óUúpňŔ∆ųĶń–߬ ”č(j®¨)ň„ŇcŹä(qi®Ęng)∂»–£ļň
Õ∆óUúpňŔ∆ųĶńáßļŌ–߬ «ļ‚ŃŅ∆š–‘ń‹Ķń“ĽāÄ(g®®)÷ō“™÷łėň(bi®°o)ņž◊Ń£¨∂ÝŹä(qi®Ęng)∂»–£ļň «ī_∂®∆š≥–›dń‹Ń¶Ķń÷ų“™“ņďĢ(j®ī)ņÁļ◊°£Ć¶(du®¨)ňŁāÉĶńņŪ’ď∑÷őŲń‹∑Ů’żī_∑īĎ™(y®©ng)Õ∆óUúpňŔ∆ųĶńĆć(sh®™)ŽH«ťõr£¨÷ĪĹ””įŪĎĶĹÕ∆óUúpňŔ∆ųÉě(y®≠u)ĽĮ‘O(sh®®)”č(j®¨)Ķń–ßĻŻ°£
Õ∆óUúpňŔ∆ų”…”ŕ≤…”√Õ∆óUŖ@“ĽŐō ‚ėč(g®įu)ľĢ◊ų일ӿX«ůĺߣ¨“Ú∂Ý ĻĶ√ňŁ‘ŕ–߬ ŇcŹä(qi®Ęng)∂»”č(j®¨)ň„∑Ĺ∑®…ŌŇc∆šňŁĽÓżXāųĄ”(d®įng)ôC(j®©)ėč(g®įu)”–ňý≤ĽÕ¨Ňŕ≥Ķ°£∆šŐōŁc(di®£n) «āųĄ”(d®įng)»¶Ćß(d®£o)≤Řƶ(du®¨)Õ∆óUĶ»–ß»ę∑īѶĶń◊ų”√Łc(di®£n)ľį∑ĹŌÚŽSÕ∆óUĻ§◊ųőĽ÷√Ķń≤ĽÕ¨∂Ýįl(f®°)…ķĶń◊ÉĽĮļ‹īů°£“Ú∂ÝŇc∆šňŁĽÓżXāųĄ”(d®įng)ôC(j®©)ėč(g®įu)£®ņż»ÁĚL÷ýĽÓżXúpňŔ∆ų£©Ķń–߬ ”č(j®¨)ň„∑Ĺ∑® «≤ĽÕ¨Ķńľ«ļł°£‘ŕ“—įl(f®°)ĪŪĶń”–ÍP(gu®°n)Õ∆óUúpňŔ∆ų–߬ ”č(j®¨)ň„ĶńőńęI(xi®§n)÷–“›‘¬£¨∂ľĹŁň∆Ķōį—‘ŕÕ‚ĚL◊”ŇcÉ»(n®®i)żX»¶÷ģťg◊ų”√ѶĻŐ∂®≤Ľ◊ÉĶń«ťõrŌ¬£¨üoń¶≤Ńďp ßēr(sh®™)Ňc”–ń¶≤Ńďp ßēr(sh®™)ňý–ŤĶńÚĆ(q®Ī)Ą”(d®įng)ѶĽÚÚĆ(q®Ī)Ą”(d®įng)ѶĺōĶńĪ»÷Ķ◊ųěťáßļŌ–߬ Īťń§°£”–ĶńŽm»ĽŅľĎ]ŃňÚĆ(q®Ī)Ą”(d®įng)ѶĺōÕŽ”≤£¨ĶęÕ¨ēr(sh®™)”÷į—”–ń¶≤Ń?x®™)rĶńÚĆ(q®Ī)Ą”(d®įng)Ѷţň∆ŐéņŪěťÕ®Ŗ^É»(n®®i)ĚL◊”÷––ń°£Ćć(sh®™)ŽH”č(j®¨)ň„ĪŪ√ų∆į¬≠£¨Ŗ@–©ĹŁň∆ŐéņŪ∑Ĺ∑®ňýéßĀŪĶń’`≤Ó «ļ‹īůĶń∂ųő≤°£∂Ý«“Ŗ@–©őńęI(xi®§n)÷Ľ”Ď’ďŃňÜőāÄ(g®®)Õ∆óUĶńáßļŌ–߬ °£
Īĺ’¬‘Ēľö(x®¨)∑÷őŲŃňÕ∆óU‘ŕ≤ĽÕ¨«ťõrŌ¬Ķń ‹Ń¶†ÓĎB(t®§i)ÕžŇ≥£¨ŅľĎ]ŃňĎT–‘ѶĶń”įŪĎļ≤“‚£¨áņ(y®Ęn)łŮįīáßļŌ–߬ ∂®ŃxÕ∆Ćß(d®£o)≥ŲŃň›^ěťĺęī_ĶńŅāůwáßļŌ–߬ ”č(j®¨)ň„Ļę Ĺ£¨≤ĘņŻ”√”č(j®¨)ň„ôC(j®©)ń‹ČÚŖM(j®¨n)––īůŃŅŹÕ(f®ī)ŽsŖ\(y®īn)ň„ĶńŐōŁc(di®£n)’°ĪŐ£¨»°ôC(j®©)ėč(g®įu)‘ŕ»Űł…≤ĽÕ¨áßļŌŁc(di®£n)őĽ÷√ēr(sh®™)–߬ Ķń∆Ĺĺý÷Ķ◊ųěťŅāĶńáßļŌ–߬ ŗ¬–›£¨”č(j®¨)ň„ĹY(ji®¶)ĻŻŇcĆć(sh®™)Úě(y®§n)ĒĶ(sh®ī)ďĢ(j®ī)ĽýĪĺŌŗő«ļŌ°£
3.1Õ∆óU‘ŕĆß(d®£o)≤ŘÉ»(n®®i)ĶńŖ\(y®īn)Ą”(d®įng)∑÷őŲ
‘ŕÕ∆óUúpňŔ∆ų÷–ņĘ Ŗ£¨Ą”(d®įng)ѶĶńāųŖf «ŅŅŖ\(y®īn)Ą”(d®įng)÷ÝĶńÕ∆óUĀŪÕÍ≥…Ķń ◊ī∑£¨Õ∆óU‘ŕĻ§◊ų––≥Ő÷–Ōŗƶ(du®¨)Ćß(d®£o)≤ŘĶńŖ\(y®īn)Ą”(d®įng) «◊ÉňŔĶńÕ‚Õ∆Ľ¨Ą”(d®įng)£¨∆šňŔ∂»urŅ…”√É»(n®®i)ĚL◊”÷––ń01Łc(di®£n)ĶńňŔ∂»ĪŪ ĺ‹ÓļĽ£¨»ÁąD2.7ňý ĺįīņš°£‘ŕ«į√ś“—«ůĶ√ģĒ(d®°ng)āųĄ”(d®įng)»¶ĻŐ∂®ēr(sh®™),É»(n®®i)ĚL◊”÷––ńOlŁc(di®£n)ĶńőĽ“∆ěť£ļ
Õ∆óU‘ŕĻ§◊ų––≥Őť_ ľēr(sh®™)£¨¶…1÷Ķěť◊Ó–°∆®◊¬£¨Ŗ@ēr(sh®™)¶…min=Tb+Te-e∑ľļű£¨a1=0£¨ £¨
£¨ ľ”ňŔ∂»∑ĹŌÚÕ¨Ŗ\(y®īn)Ą”(d®įng)∑ĹŌÚ“Ľ÷¬ļīňĮ£¨ľīŹńÉ»(n®®i)ŌÚÕ‚◊ųľ”ňŔŖ\(y®īn)Ą”(d®įng)«ļ√“°£
ľ”ňŔ∂»∑ĹŌÚÕ¨Ŗ\(y®īn)Ą”(d®įng)∑ĹŌÚ“Ľ÷¬ļīňĮ£¨ľīŹńÉ»(n®®i)ŌÚÕ‚◊ųľ”ňŔŖ\(y®īn)Ą”(d®įng)«ļ√“°£
Õ∆óU‘ŕĻ§◊ų––≥ŐĹY(ji®¶) ÝőĽ÷√£¨¶…1Ŗ_(d®Ę)ĶĹ◊Óīů÷Ķ¶…min=Tb+Tz+eŖů»°£¨īňēr(sh®™)a1=0«¶ņū£¨ =¶–£¨
=¶–£¨ =0∑„Ķ‹£¨
=0∑„Ķ‹£¨ ľ”ňŔ∂»∑ĹŌÚŇcŖ\(y®īn)Ą”(d®įng)∑ĹŌÚŌŗ∑ī–ŌŌŪ£¨ľī◊ųúpňŔŖ\(y®īn)Ą”(d®įng)°£
ľ”ňŔ∂»∑ĹŌÚŇcŖ\(y®īn)Ą”(d®įng)∑ĹŌÚŌŗ∑ī–ŌŌŪ£¨ľī◊ųúpňŔŖ\(y®īn)Ą”(d®įng)°£
ěť«ů≥Ų Ķ≠ ę£¨√Łar=0ļßŐŃ£¨Ņ…Ķ√£ļ
Ķ≠ ę£¨√Łar=0ļßŐŃ£¨Ņ…Ķ√£ļ

¬ď(li®Ęn)ŃĘ£®3.4£© Ĺľį£®3.1£© Ĺ£¨Ņ…«ůĶ√ar=0ēr(sh®™)ƶ(du®¨)Ď™(y®©ng)Ķń ÷Ķļę»›£¨”…īňŅ…Ķ√ĶĹ‘ďőĽ÷√łųŖ\(y®īn)Ą”(d®įng)ÖĘĒĶ(sh®ī)Ķń÷ĶŅÓő•£¨īňēr(sh®™)ňŔ∂»”–◊Óīů÷Ķurmax°£
÷Ķļę»›£¨”…īňŅ…Ķ√ĶĹ‘ďőĽ÷√łųŖ\(y®īn)Ą”(d®įng)ÖĘĒĶ(sh®ī)Ķń÷ĶŅÓő•£¨īňēr(sh®™)ňŔ∂»”–◊Óīů÷Ķurmax°£
[ň„ņż]
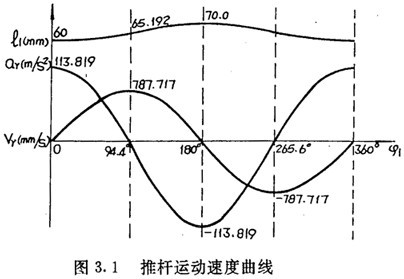
ƶ(du®¨)”ŕ3TWY7.5-12Õ∆÷≤úpňŔ∆ų÷śĻ•£¨Tb=55mmĶžĽű£¨Tz=10mm£¨¶Ň=5mm◊ýĺÚ£¨¶…=36mmĶ›ÕÔ£¨¶ōJ=1500RPM£¨iJN=-11≤Ķĺő£¨”č(j®¨)ň„≥ŲĶń¶…1ĺśŃś£¨ £¨arŇc
£¨arŇc ĶńÍP(gu®°n)ŌĶ«ķĺÄ»ÁąD3.1ňý ĺ’Íī•°£
ĶńÍP(gu®°n)ŌĶ«ķĺÄ»ÁąD3.1ňý ĺ’Íī•°£
3.2Õ∆óU ‹Ń¶∑÷őŲ
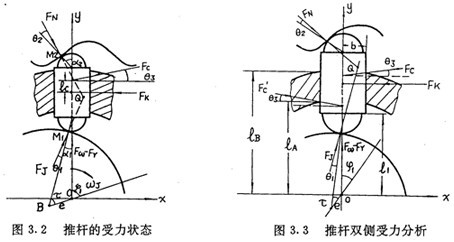
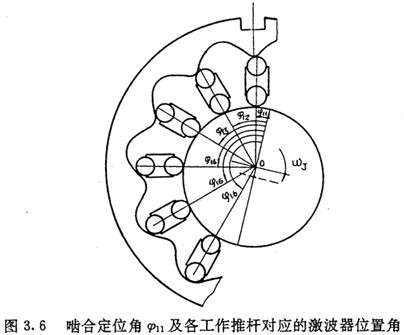
‘ŕĶŕ∂Ģ’¬“—į—Õ∆óUúpňŔ∆ųłýďĢ(j®ī)āųĄ”(d®įng)»¶ «∑ŮŇcľ§≤®∆ųřD(zhu®£n)ŌÚŌŗÕ¨∑÷ěť’ż∑īÉ…∑NĹY(ji®¶)ėč(g®įu)ő«∆ī°£Ŗ@É…∑NĹY(ji®¶)ėč(g®įu)Ķń ‹Ń¶†ÓĎB(t®§i) «≤ĽÕ¨Ķń°£Ō¬√śŌ»”Ď’ď’żŌÚĹY(ji®¶)ėč(g®įu)¬ū∆Ń°£
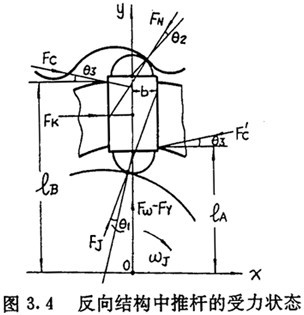
‘O(sh®®)ľ§≤®∆ųįīŪėēr(sh®™)Šė∑ĹŌÚřD(zhu®£n)Ą”(d®įng)ĺ÷»®£¨»ÁąD3.2ňý ĺ£¨Ątľ§≤®∆ų∆» ĻŇc∆šĹ””|ĶńÉ»(n®®i)ĚL◊”◊‘…Ū“‘ńśēr(sh®™)Šė∑ĹŌÚřD(zhu®£n)Ą”(d®įng)Ń‚Ĺš£¨‘ྦྷ≤®∆ųŇcÉ»(n®®i)ĚL◊”Ĺ””|Łc(di®£n)M1Őéĺ‹–ž£¨ľ§≤®∆ųřD(zhu®£n)Ą”(d®įng)ĶńĽ°ťLīů”ŕÉ»(n®®i)ĚL◊”řD(zhu®£n)Ą”(d®įng)ĶńĽ°ťL£¨ňý“‘ľ§≤®∆ųƶ(du®¨)É»(n®®i)ĚL◊”Ķńń¶≤ŃѶ∑ĹŌÚ «—ō«–ĺÄ∑ĹŌÚŌÚ”“ĽŘįŌ£¨Ňcľ§≤®∆ų—ōĹ””|Łc(di®£n)∑®ĺÄ∑ĹŌÚ?q®Ī)¶É?n®®i)ĚL◊”Ķń◊ų”√Ѷ“Ľ∆ūĹM≥…»ę∑ī◊ų”√ѶFJ√ß√Ņ°£‘ŕÕ‚ĚL◊”ŇcÉ»(n®®i)żX»¶Ĺ””|Łc(di®£n)ÔL(f®•ng)Ő飨ՂĚL◊”—ōżXņ™ŌÚżXłý∑ĹŌÚŖ\(y®īn)Ą”(d®įng)–Ķ ř£¨É»(n®®i)żX»¶żXņ™Ć¶(du®¨)Õ‚ĚL◊”Ķńń¶≤ŃѶ∑ĹŌÚ?y®§n)ť—ōżXņ™÷łŌÚżXŪĒ?sh®ī)ń«–ĺÄ∑ĹŌÚŌĹĪł£¨ŇcÉ»(n®®i)żX»¶—ōĹ””|Łc(di®£n)M2∑®ĺÄ∑ĹŌÚ?q®Ī)¶Õ‚ĚL◊”Ķń◊ų”√Ѷ“Ľ∆ūĹM≥…»ę∑īѶFNŌŐīĹ°£
‘ŕāųĄ”(d®įng)»¶Ćß(d®£o)≤ŘŇcÕ∆óUĶńĹ””|Ő飨 ‹ĶĹāųĄ”(d®įng)»¶Ćß(d®£o)≤Řƶ(du®¨)Õ∆óUĶńŌÚŌ¬ń¶≤ŃѶŅĹ‘ů£¨Ňc—ō∑®ĺÄ∑ĹŌÚĶńľs Ý∑īѶ“Ľ∆ūĹM≥…»ę∑īѶFC“Ŗ»Ķ°£
ąD3.2÷–Ķń¶»1°Ę¶»2 ňĺ÷¬°Ę¶»3∑÷Ąeěťľ§≤®∆ųŇcÉ»(n®®i)ĚL◊”÷ģťg∂©…ő°ĘÉ»(n®®i)żX»¶żXņ™ŇcÕ‚ĚL◊”÷ģťg“‘ľįĆß(d®£o)≤ŘŇcÕ∆óU÷ģťgĶńń¶≤ŃĹ«°£
»Á…ŌĻĚ(ji®¶)ňý ŲįŲőŁ£¨īŖľĢ‘ŕŽSāų»¶◊ųĄÚňŔŖ\(y®īn)Ą”(d®įng)ĶńÕ¨ēr(sh®™)£¨ŖÄŌŗƶ(du®¨)Ćß(d®£o)≤Ř◊ųľ”ňŔ∂»ěťarĶńľ”ňŔŖ\(y®īn)Ą”(d®įng)∆Ų◊Į°£łýďĢ(j®ī)Ŗ_(d®Ę)ņ ≤ģ‘≠ņŪłĢŖŽ£¨≥żŃň…Ō Ų’śĆć(sh®™)Ķń◊ų”√Ѷľįľs Ý∑īŃ¶Õ‚£¨‘ŔľŔŌŽĶōľ”…ŌĎT–‘ѶĶń∑īѶ¬¶ņ•£¨Ŗ@–©Ń¶‘ŕ–ő Ĺ…ŌĹM≥…“ĽāÄ(g®®)∆Ĺļ‚ѶŌĶŇŚőĘ°£Õ∆óUňýģa(ch®£n)…ķĶńĎT–‘Ѷ”…»ż≤Ņ∑÷ĹM≥…£ļŌÚ–ńѶF¶ō£¨Ōŗƶ(du®¨)ĎT–‘ѶFr√»—ś£¨Ņ∆ ŌĎT–‘ѶFk≤ł√–£¨ňŁāÉĶń◊ų”√Łc(di®£n)Ņ…Ņī◊ų «Õ∆óUĶńŔ|(zh®¨)–ń£¨∆š∑īѶĶń∑ĹŌÚ»ÁąD3.2ňý ĺņť∆Ŕ£¨”…ņŪ’ďѶĆW(xu®¶)÷™÷Ļ≤Ř£¨ňŁāÉĶń”č(j®¨)ň„įīŌ¬ Ĺ£ļ
Ĺ÷–m «Õ∆óUĶńŔ|(zh®¨)ŃŅ°£
3.2.1Õ∆óUÜőā»(c®®) ‹Ń¶Ķń∆Ĺļ‚∑Ĺ≥Ő
ģĒ(d®°ng)FJňÕŌō°ĘFN∂ĢѶĶńĹĽŁc(di®£n)Q¬š‘ŕāųĄ”(d®įng)»¶ňý‘ŕ≠h(hu®Ęn)É»(n®®i)£®ąD3.2ňý ĺ£©◊Šĺ√£¨Õ∆óU≥ ¨F(xi®§n)Üőā»(c®®) ‹Ń¶†ÓĎB(t®§i)£®”“ā»(c®®) ‹Ń¶£©£¨Ć¶(du®¨)Õ∆óUŔ|(zh®¨)–ń»°ĺō◊ņŔň£¨Ņ…Ķ√»ÁŌ¬∆Ĺļ‚∑Ĺ≥Ő Ĺ£ļ
”…”ŕŅľĎ]ŃňĎT–‘Ѷ«®‘Ň£¨ňý“‘ѶFc ≤ĽÕ®Ŗ^ĹĽŁc(di®£n)Q£¨lc“≤ «“ĽāÄ(g®®)őī÷™ĒĶ(sh®ī)Ľ≤∆Ů°£»ŰłýďĢ(j®ī)›Ē»ŽĻ¶¬ ī_∂®≥ŲFJ‘Ńőī£¨Ąt∑Ĺ≥ŐĹM£®3.8£©÷Ľ £Ō¬FN°ĘFCľįlc»żāÄ(g®®)őī÷™ĒĶ(sh®ī)ŃňŐÔņž°£
3.2.2Õ∆óUŽpā»(c®®) ‹Ń¶Ķń∆Ĺļ‚∑Ĺ≥Ő
»ŰāųĄ”(d®įng)»¶≥ŖīÁŖx”√≤ĽģĒ(d®°ng)łŅŐĽ£¨ĽÚ’Ŗ «ôC(j®©)ėč(g®įu)ěť∑īŌÚĹY(ji®¶)ėč(g®įu)£¨ ĻFJŇcFN◊ų”√ѶĶńĹĽŁc(di®£n)Q ¬š‘ŕāųĄ”(d®įng)»¶ňý‘ŕ≠h(hu®Ęn)Õ‚£®ąD3.3ňý ĺ£©ēr(sh®™)ńļ‘–£¨Õ∆óU≥ ¨F(xi®§n)Žpā»(c®®) ‹Ń¶†ÓĎB(t®§i)ŅŃň≤°£…ķģa(ch®£n)Ćć(sh®™)Ř`ĪŪ√ų£¨Õ∆óUŽpā»(c®®) ‹Ń¶ĆĘ‘ž≥…Õ∆óUáņ(y®Ęn)÷ōĶńń•ďp ģŇľ°£Ŗ@∑N«ťõrŌ¬Õ∆óUĶń ‹Ń¶ŇcāųĄ”(d®įng)»¶Õ‚ŹĹ≥ŖīÁ”–ÍP(gu®°n)∆–Ō °£Ć¶(du®¨)”ŕąD3.3ňý ĺ ‹Ń¶«ťõr‘įŌł£¨Ć¶(du®¨)Õ∆óUŔ|(zh®¨)–ń»°ĺō£¨Ņ…Ń–≥ŲňŁĶń∆Ĺļ‚∑Ĺ≥Ő Ĺěť£ļ
3.2.3∑īŌÚĹY(ji®¶)ėč(g®įu)Ķń ‹Ń¶∑÷őŲ
‘ŕāųĄ”(d®įng)»¶Ňcľ§≤®∆ųřD(zhu®£n)ŌÚŌŗ∑īĶńĹY(ji®¶)ėč(g®įu)÷–Ĺ”–££¨Ļ§◊ųÕ∆óUĶń ‹Ń¶†Ó’\»ÁąD3.4ňý ĺ√Õ∆Ķ°£Źń ‹Ń¶†ÓĎB(t®§i)ąDŅ…“‘Ņī≥Ų£¨‘ŕŖ\(y®īn)Ą”(d®įng)Ŗ^≥Ő÷–÷Ž√„£¨Õ∆óUŇcĆß(d®£o)≤ŘĪō»Ľ–ő≥…Žpā»(c®®)Ĺ””|¬Ļ—į°£Õ∆óUÉ…ā»(c®®)ĆĘ‘ž≥…áņ(y®Ęn)÷ōń•ďp£¨Ćć(sh®™)ŽH…ķģa(ch®£n)÷–∑ŐŃŤ£¨Ď™(y®©ng)Ī‹√‚ Ļ”√∑īŌÚĹY(ji®¶)ėč(g®įu)’Ī—¨°£
3.3–߬ ”č(j®¨)ň„
3.3.1ÜőāÄ(g®®)Õ∆óUĶń–߬ ”č(j®¨)ň„
Źń∑Ĺ≥ŐĹM£®3.8£©÷–ŌŻ»•FNĶ√£ļ

3.3.2’Żůw–߬ ”č(j®¨)ň„
Źń…Ō√śÜőāÄ(g®®)Õ∆óUĶń–߬ ”č(j®¨)ň„Ļę ĹŅ…÷™£¨Ć¶(du®¨)Ď™(y®©ng)ľ§≤®∆ųĶń≤ĽÕ¨řD(zhu®£n)Ĺ«¬¬ň–£¨–߬ «≤ĽÕ¨ĶńŃ°∑®°£Ćć(sh®™)ŽH…ŌŅā”–∂ŗāÄ(g®®)Õ∆óUÕ¨ēr(sh®™)Ļ§◊ų£¨“Ú∂ÝĎ™(y®©ng)«ů≥Ų’ŻāÄ(g®®)ôC(j®©)ėč(g®įu)ĶńŅāůw–߬ ∂Ňň≥°£
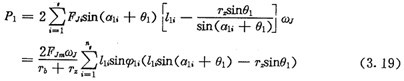
Ō¬√ś ◊Ō»ĀŪ∑÷őŲÚĆ(q®Ī)Ą”(d®įng)Ѷ‘ŕĻ§◊ųÕ∆óU…ŌĶń∑÷≤ľ“é(gu®©)¬…≤∆łť°£
‘O(sh®®)āųĄ”(d®įng)ėč(g®įu)ľĢ÷ģťgüoťgŌ∂£¨≤Ę‘O(sh®®)ľ§≤®∆ų «ÕÍ»ęĄā–‘Ķń«š≤Ň°£‘ŕÚĆ(q®Ī)Ą”(d®įng)Ѷĺō◊ų”√Ō¬≤ű…•£¨łųĻ§◊ųÕ∆óUĶńÉ»(n®®i)ĚL◊”‘ŕŇcľ§≤®∆ųĹ””|Őéģa(ch®£n)…ķ∑®ŌÚŹó–‘◊É–ő£¨ Ļľ§≤®∆ųřD(zhu®£n)Ŗ^“ĽāÄ(g®®)őĘ–°ĶńĹ«∂»°ų¶»Īĺ≤©£¨»ÁąD3.5ňý ĺĺÕŃŰ£¨ĄtŅ…ī_∂®Źó–‘◊É–őŃŅ¶ŇiĶń∑÷≤ľ“é(gu®©)¬…°£
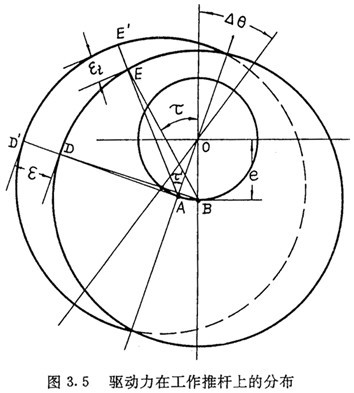
‘O(sh®®)◊ÓīůŹó–‘◊É–őŃŅ읶ҼŰ÷ī£¨”…ąD3.5Ņ…÷™£ļ

…Ō Ĺ÷–£ļFJměťĆ¶(du®¨)Ď™(y®©ng)◊Óīů◊É–őŐéĶń◊ų”√Ѷ…ĹŐŌ£ĽFJiěťľ§≤®∆ųƶ(du®¨)ĶŕiāÄ(g®®)Õ∆óUĶń◊ų”√Ѷ£Ľ¶”iěťĶŕiāÄ(g®®)Õ∆óUÉ»(n®®i)ĚL◊”÷––ńŇcľ§≤®∆ų∂Ő›SňýäAĶńąA–ńĹ«…ĺ√Ģ°£»ÁąD3.2ňý ĺņÚő…°£
‘ŕ»ő “Ľň≤ťg£¨łųĻ§◊ųÕ∆óUňýŐéĶńőĽ÷√ «≤ĽÕ¨ĶńŇ ń£¨‘O(sh®®)ĶŕiāÄ(g®®)Ļ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųřD(zhu®£n)Ĺ«ěť”◊≥Ī£¨Ąt£ļ
“Ľň≤ťg£¨łųĻ§◊ųÕ∆óUňýŐéĶńőĽ÷√ «≤ĽÕ¨ĶńŇ ń£¨‘O(sh®®)ĶŕiāÄ(g®®)Ļ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųřD(zhu®£n)Ĺ«ěť”◊≥Ī£¨Ąt£ļ

”…”ŕŌŗŗŹÉ…Õ∆óUňýäAĶń÷––ńĹ«ěť2¶–/ZC£¨‘ŕń≥“Ľēr(sh®™)ŅŐĽĶįŮ£¨÷Ľ“™∆š÷– “ĽāÄ(g®®)Ļ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«£®ľ§≤®∆ųŌŗƶ(du®¨)‘ďÕ∆óUŹń≥ű ľĻ§◊ųőĽ÷√řD(zhu®£n)Ŗ^ĶńĹ«∂»£©ī_∂®ļůŇų∆Ľ£¨∆šňŁłųĻ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«“≤ŽS÷ģī_∂®Ō¬ĀŪ°£‘O(sh®®)łųĻ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķń◊Ó–°ľ§≤®∆ųőĽ÷√Ĺ«ěť
“ĽāÄ(g®®)Ļ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«£®ľ§≤®∆ųŌŗƶ(du®¨)‘ďÕ∆óUŹń≥ű ľĻ§◊ųőĽ÷√řD(zhu®£n)Ŗ^ĶńĹ«∂»£©ī_∂®ļůŇų∆Ľ£¨∆šňŁłųĻ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«“≤ŽS÷ģī_∂®Ō¬ĀŪ°£‘O(sh®®)łųĻ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķń◊Ó–°ľ§≤®∆ųőĽ÷√Ĺ«ěť “°Őž£¨»ÁąD3.6ňý ĺī‚Ň»£¨ĄtŹńƶ(du®¨)Ď™(y®©ng)ľ§≤®∆ųőĽ÷√Ĺ«ěťĶńŖ@āÄ(g®®)Ļ§◊ųÕ∆óUť_ ľ£¨Ūė–ÚĶŕiāÄ(g®®)Ļ§◊ų◊ĶóUňýĎ™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«ěť£ļ
“°Őž£¨»ÁąD3.6ňý ĺī‚Ň»£¨ĄtŹńƶ(du®¨)Ď™(y®©ng)ľ§≤®∆ųőĽ÷√Ĺ«ěťĶńŖ@āÄ(g®®)Ļ§◊ųÕ∆óUť_ ľ£¨Ūė–ÚĶŕiāÄ(g®®)Ļ§◊ų◊ĶóUňýĎ™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«ěť£ļ

Ŗ@ė”»™◊Ý£¨“ĽĶ©◊Ó–°ľ§≤®∆ųőĽ÷√Ĺ« ĪĽī_∂®ő™Ųý£¨łųĻ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«Ī„ŽS÷ģĪĽī_∂®Ō¬ĀŪ…—∆Õ£¨Źń∂ÝłųáßļŌŁc(di®£n)“≤ĪĽī_∂®Ō¬ĀŪ£¨∑Q◊Ó–°ľ§≤®∆ųőĽ÷√Ĺ« ěťáßļŌŁc(di®£n)∂®őĽĹ«Ļ¬«’£¨ļÜ∑QáßļŌ∂®őĽĹ«∆Á’Ś°£áßļŌ∂®őĽĹ«Ķń»°÷Ķ∑∂áķ «£ļ
0°‹<
Óźň∆∑Ĺ≥ŐĹM£®3.8£©ĶńĹ®ŃĘľį«ůĹ‚£¨Ņ…Ķ√ĶŕiāÄ(g®®)Ļ§◊ųÕ∆óUĶńFciľįlci∆ę–ő£¨Ňc Ĺ£®3.10£©ľį£®3.11£©ÓźÕ¨ĺ≤–š°£
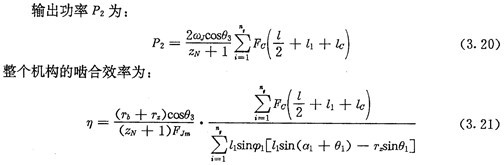
ŅľĎ]ĶĹĆć(sh®™)ŽH—b÷√읎pŇŇĹY(ji®¶)ėč(g®įu)£¨›Ē»ŽĻ¶¬ P1Ņ…ĪŪ ĺěť£ļ
ěť ĻĪŪŖ_(d®Ę) ĹļÜĚćŅ°Ň§£¨ĪĺőńŌ¬√ś‘ŕņŘľ”∑ŻŐĖ(h®§o)°į °ĪļůĶń Ĺ◊”÷–∂”≥»£¨łųÖĘŃŅƶ(du®¨)Ď™(y®©ng)ĶńŌ¬ėň(bi®°o)i¬‘»•≤ĽĆĎ£¨»Áali÷ĽĆĎ≥…alĪīŇĘ°£
°ĪļůĶń Ĺ◊”÷–∂”≥»£¨łųÖĘŃŅƶ(du®¨)Ď™(y®©ng)ĶńŌ¬ėň(bi®°o)i¬‘»•≤ĽĆĎ£¨»Áali÷ĽĆĎ≥…alĪīŇĘ°£
…Ō Ų Ĺ÷–∂∑ Ú£¨ngĪŪ ĺĻ§◊ųÕ∆óUĒĶ(sh®ī)°£‘ŕõ]”–ŪĒ«–∂«‘°£¨”÷≤Ľ–ř–őĶńņŪ’ď«ťõrŌ¬£¨Ļ§◊ųÕ∆óUĒĶ(sh®ī)ngěťÕ∆óUŅāĒĶ(sh®ī)Ķń“ĽįŽő≠–Ű°£Ćć(sh®™)ŽH…ŌĶ≠Ķķ£¨”…”ŕżXņ™–ř–őĶ»‘≠“Ú£¨Ćć(sh®™)ŽHĻ§◊ųÕ∆óUĒĶ(sh®ī)ngĪ»ņŪ’ď«ťõrŌ¬“™…ŔĻ©ő—°£
”č(j®¨)ň„ēr(sh®™)“Ľ≤Ĺ£¨Ō»łýďĢ(j®ī)›Ē»ŽĻ¶¬ P1ľįřD(zhu®£n)ňŔ¶ōJ”…£®3.19£© Ĺ”č(j®¨)ň„≥ŲFJm£¨»Ľļůƶ(du®¨)√Ņ“ĽĻ§◊ųÕ∆óU”… Ĺ£®3.17£©”č(j®¨)ň„≥ŲFJiįŔŐť£¨”… Ĺ£®3.10£© Ĺľį Ĺ£®3.11£©”č(j®¨)ň„≥ŲFciľįlci¬ ¬ķ£¨◊Óļůīķ»Ž Ĺ(3.21£©”č(j®¨)ň„≥Ų–߬ ¶«°£
ģĒ(d®°ng)≤ĽŅľĎ]ĎT–‘Ѷēr(sh®™)’∂Ĺ«£¨÷Ľ–ŤŃÓ…Ō ŲĻę Ĺ÷–ĶńFr“ńńŇ£¨FK£¨F¶ō∂ľĶ»”ŕŃ„Ńśō§£¨Ŗ@ēr(sh®™)Ļę Ĺěť£ļ
Ņ…“äĶŅ◊Ų£¨‘ŕļŲ¬‘ĎT–‘Ѷ”įŪĎĶń«ťõrŌ¬£¨ôC(j®©)ėč(g®įu)ĶńáßļŌ–߬ Ňc›Ē»ŽĻ¶¬ Ľ©ĽÍ°ĘřD(zhu®£n)ňŔ∂ľüoÍP(gu®°n)łō◊Ŗ°£
Źń Ĺ£®3.22£©ĽÚ Ĺ£®3.21£©Ņ…÷™£¨ôC(j®©)ėč(g®įu)Ķń’ŻůwáßļŌ–߬ ¶«ŇcłųĻ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«”–ÍP(gu®°n)¬ľĪū£¨∂ÝłųĻ§◊ųÕ∆óUňýƶ(du®¨)Ď™(y®©ng)Ķńľ§≤®∆ųőĽ÷√Ĺ«”÷Ņ…ŽSáßļŌ∂®őĽĹ«Ķńī_∂®ĪĽī_∂®Ō¬ĀŪ–ŗ…ę°£“Ú∂Ý£¨Ć¶(du®¨)÷ł∂®ĶńáßļŌ∂®őĽĹ«◊ťŐ‚£¨”… Ĺ£®3.22£©Ņ…”č(j®¨)ň„Ķ√ĶĹő®“ĽĶńĒĶ(sh®ī)÷Ķļýń–£¨ģĒ(d®°ng) ‘ŕ∆š»°÷Ķ∑∂áķÉ»(n®®i)»°≤ĽÕ¨÷Ķēr(sh®™)Īßņš£¨”… Ĺ£®3.22£©ňý”č(j®¨)ň„≥ŲĶń–߬ “≤¬‘”–≤ĽÕ¨°£ěťīňŐŕ”Ģ£¨ĆĘáßļŌ∂®őĽĹ«Ķń»°÷ĶÖ^(q®Ī)”Ú£Ř0,2¶–/ZC] ∆Ĺĺý∑÷≥…50Ķ»∑÷Ň«≤„£¨∑÷Ąe”√ Ĺ£®3.22)”č(j®¨)ň„áßļŌ∂®őĽĹ«»°Ŗ@50āÄ(g®®)őĽ÷√Ķń≤ĽÕ¨ĒĶ(sh®ī)÷Ķēr(sh®™)ôC(j®©)ėč(g®įu)ĶńáßļŌ–߬ £¨»Ľļů»°∆š∆Ĺĺý÷Ķ◊ųěťôC(j®©)ėč(g®įu)ĶńŅā∆ĹĺýáßļŌ–߬ ąŲņŻ÷į£¨ľī

ƶ(du®¨)ĹĽŁc(di®£n)Q¬š‘ŕāųĄ”(d®įng)»¶ňý‘ŕ≠h(hu®Ęn)Õ‚Ķń«ťõr»§–ߣ¨‘ŕ∑Ĺ≥ŐĹM£®3.9£©÷–ŌŻ»•FNļů£¨Óźň∆…Ō Ų∑Ĺ∑®Õ¨ė”Ņ…«ůĶ√īňēr(sh®™)Ķń–߬ ”č(j®¨)ň„Ļę Ĺļ≥”Į°£Ćć(sh®™)ŽH”č(j®¨)ň„ĪŪ√ųįŪ–ū£¨Ŗ@∑N«ťõr–߬ ›^ĶÕ£¨∂Ý«“Õ∆óU ‹Ń¶†ÓĎB(t®§i)≤Ľļ√Ĺŕ∂Ô£¨ĆĘ‘ž≥…áņ(y®Ęn)÷ōń•ďpŅš”™°£Ćć(sh®™)ŽH‘O(sh®®)”č(j®¨)÷–Ď™(y®©ng)Ī‹√‚Ŗ@∑N«ťõrįl(f®°)…ķ°£“Ú∂Ý‘ŕ‘O(sh®®)”č(j®¨)Õ∆óUúpňŔ∆ųēr(sh®™)—ķľÁ£¨Ď™(y®©ng)’żī_Ŗx”√āųĄ”(d®įng)»¶≥ŖīÁľį∆šňŁłųÖĘĒĶ(sh®ī)∆∂Ĺť£¨“‘ī_Ī£QŁc(di®£n)»őļőēr(sh®™)ļÚ∂ľń‹¬š‘ŕāųĄ”(d®įng)»¶ňý‘ŕ≠h(hu®Ęn)É»(n®®i)°£
£Řň„ņż]£ļ
TW-3-16Õ∆óUúpňŔ∆ųĶńÖĘĒĶ(sh®ī) «£ļTb=50mm,Tz=6mmĺÚ”„£¨e=3mmīš–Ó£¨l=22mm£¨ZN=15,ZC=16√ýņĻ°£
∑÷őŲÕ∆óUúpňŔ∆ųłųáßļŌłĪĶń–ő ĹŅ…÷™«ņő∆£¨Õ∆óUŇcĆß(d®£o)≤Ř «Ľ¨Ą”(d®įng)ń¶≤ŃĹ””|£¨ľ§≤®∆ųŇcÉ»(n®®i)ĚL◊”Ņ…ĹŁň∆Ņī◊ųĚLĄ”(d®įng)ń¶≤ŃĹ””|ī–∂ £¨∂ÝÉ»(n®®i)żX»¶ŇcÕ‚ĚL◊”÷ģťgĚLĽ¨É…∑N≥…∑›∂ľ”–—ŤĹň°£
”…őńęI(xi®§n)≤ťĶ√Ľ¨Ą”(d®įng)ń¶≤ŃŌĶĒĶ(sh®ī)ěť0.05-0.1£¨∂ÝĚLĄ”(d®įng)ń¶◊ŤŌĶĒĶ(sh®ī)k=0.01mmŃ¨ĺ‚£¨”…őńęI(xi®§n)Ņ…÷™ĚLĄ”(d®įng)ń¶≤ŃŌĶĒĶ(sh®ī)ěťk/Tz=0.0017Ļť≤‘°£”…”ŕń¶≤ŃŌĶĒĶ(sh®ī)÷Ľ «āÄ(g®®)ÖĘŅľĒĶ(sh®ī)÷Ķ£¨ěťŃň Ļ”č(j®¨)ň„ĹY(ji®¶)ĻŻłŁ”–Ćć(sh®™)ŽH“‚Ńx‘ň≤ņ£¨Ŗx”√Ńň»żĹM≤ĽÕ¨ń¶≤ŃŌĶĒĶ(sh®ī)Ķń÷Ķň™“Ĺ£¨”č(j®¨)ň„ĹY(ji®¶)ĻŻ»ÁĪŪ3.1ňý ĺ°£
ĪŪ3.1Ŗx”√≤ĽÕ¨ń¶≤ŃĹ«ēr(sh®™)áßļŌ–߬ Ķń”č(j®¨)ň„ĹY(ji®¶)ĻŻ
|
¶»1 ¶»2 ¶»3 ¶«P |
|
0.002 0.01 0.06 0.958
0.0025 0.015 0.07 0.951
0.003 0.02 0.08 0.946 |
‘O(sh®®)¶«ôC(j®©)ěťÕ∆óUúpňŔôC(j®©)Ķń’Żůw–߬ ≤ĶĻś£¨¶«Zěť›S≥––߬ Ž»Ń≤£¨¶«JěťĻ§◊ųēr(sh®™)Ēᥔ(d®įng)ĚôĽ¨”ÕĶńĻ¶¬ ďp ߣ¨ĄtĎ™(y®©ng)”–£ļ
¶«ôC(j®©)=¶«P°§¶«Z°§¶«J £®3.24£©
”…‘áÚě(y®§n)÷™¬ūĻļ£¨¶«ôC(j®©)=0.91“Ĺń–£¨’ŻôC(j®©)≤…”√Ńň4ƶ(du®¨)›S≥–ĹŁň∆»°¶«Z=0.97£¨¶«J =0.98,”… Ĺ£®4.24£©Ņ…Ķ√¶«P=0.957ńŪ√„°∂∆ňů£Ņ…“äĶ∂…≠£¨Ćć(sh®™)ŽHáßļŌ–ßŇcņŪ’ď”č(j®¨)ň„ĽýĪĺŌŗ∑ŻļŌ°£
3.3.3ėč(g®įu)ľĢ≥ŖīÁƶ(du®¨)áßļŌ–߬ Ķń”įŪĎ
ěťŃňŇ–ĒŗÕ∆óUúpňŔ∆ųėč(g®įu)ľĢ≥ŖīÁƶ(du®¨)∆š–߬ Ķń”įŪĎĪ®’ň£¨Ć¶(du®¨)3TWY7.5-12Õ∆óUúpňŔ∆ų—–Ķ◊£¨Ŗx”√Õ¨“ĽĹMń¶≤ŃŌĶĒĶ(sh®ī)£¨∂Ýłń◊Éń≥“ĽĽýĪĺėč(g®įu)ľĢ≥ŖīÁ∆ýŃĪ£¨≤ĘľŔ∂®āųĄ”(d®įng)»¶≥ŖīÁŽS÷ģłń◊É“‘ī_Ī£ ‹Ń¶ĹĽŁc(di®£n)Q¬š‘ŕāųĄ”(d®įng)»¶ňý‘ŕ≠h(hu®Ęn)É»(n®®i)–řĪ‚£¨”č(j®¨)ň„∆šáßļŌ–߬ £¨ĹY(ji®¶)ĻŻ»ÁąD3.7ňý ĺņ∆ŅŲ°£
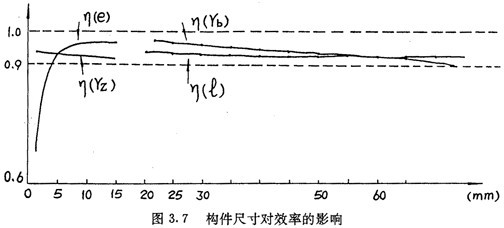
ŹńąD3.7Ņ…“‘Ņī≥ŲŌŅńś£¨áßļŌ–߬ ŽS÷Ýľ§≤®∆ų∆ę–ńĺŗeĶń‘Ųīů∂Ý…żłŖ£¨ŽS÷Ýľ§≤®∆ųįŽŹĹTbĻ≥ť≠°ĘĚL◊”įŽŹĹTzńÓĽ°°ĘÕ∆óUťL∂»lĶń‘Ųīů∂ÝĹĶĶÕ°£∆š÷–∆ę–ńĺŗőš“≤°£Ć¶(du®¨)–߬ Ķń”įŪĎ◊Óěťáņ(y®Ęn)÷ō“ņ≤•£¨Õ∆óUťL∂»Ć¶(du®¨)–߬ Ķń”įŪĎ◊Ó–°°£
3.4Źä(qi®Ęng)∂»–£ļň
łýďĢ(j®ī)Õ∆óUúpňŔ∆ųĹY(ji®¶)ėč(g®įu)…ŌĶńŐōŁc(di®£n)ĻĘ÷ū£¨Źä(qi®Ęng)∂»–£ļňĎ™(y®©ng)÷Ý÷ō”ŕłųŃ„ľĢ÷ģťgĶńĹ””|Źä(qi®Ęng)∂»»Ęľ‹°£”…”ྦྷ≤®∆ųŇcÉ»(n®®i)ĚL◊”÷ģťg“‘ľįÉ»(n®®i)żX»¶ŇcÕ‚ĚL◊”÷ģťg≤ĽÉHŌŗĽ•◊ų”√Ѷīů£¨∂Ý«“ «ĺÄĹ””|Õśņš£¨“Ú∂ÝŖ@–©Ń„ľĢ «–Ť“™ŖM(j®¨n)––Ĺ””|Źä(qi®Ęng)∂»–£ļňĶń÷ų“™Ć¶(du®¨)Ōů°£‘ŕÕ∆óUŇcāųĄ”(d®įng)»¶Ćß(d®£o)≤Ř÷ģťgŃ∂Š££¨”…”ŕĹ””|√ś∑e›^īů«Ô√££¨Ļ Ĺ””|Ď™(y®©ng)Ѷ≤ĽēĢ(hu®¨)Őęīů°£ģĒ(d®°ng)Ń„ľĢňý Ļ”√Ķń≤ńŃŌľįüŠŐéņŪ∑Ĺ Ĺ≤ĽÕ¨ēr(sh®™)ńň–„£¨∆š‘S”√Ĺ””|Ď™(y®©ng)Ѷīů–°“≤≤ĽŌŗÕ¨łō÷Ý£¨“Ú∂Ýƶ(du®¨)ľ§≤®∆ųŇcÉ»(n®®i)ĚL◊”Ĺ””|Őé“‘ľįÉ»(n®®i)żX»¶ŇcÕ‚ĚL◊”Ĺ””|Őé∂ľĎ™(y®©ng)ŖM(j®¨n)––Ĺ””|Ď™(y®©ng)ѶĶń”č(j®¨)ň„°£
3.4.1ľ§≤®∆ųŇcÉ»(n®®i)ĚL◊”÷ģťgĶńĹ””|Ď™(y®©ng)Ѷ
ľ§≤®∆ųŇcÉ»(n®®i)ĚL◊”ĶńĹ””|∂Ś—∂£¨Ô@»Ľ «É…āÄ(g®®)ąA÷ýůwĶńŌŗČļĹ””| ŗĽŖ£¨”…Źó–‘ѶĆW(xu®¶)Ņ…÷™£¨‘ŕĹ””|Őéģa(ch®£n)…ķĶń
◊ÓīůĹ””|Ď™(y®©ng)Ѷ¶“HJŅ…”…Ō¬√śĶńļ’∆ĚĎ™(y®©ng)ѶĻę ĹĀŪ”č(j®¨)ň„£ļ

…Ō Ĺ÷–£ļběťÉ»(n®®i)ĚL◊”ĶńĻ§◊ųťL∂»Ķ∂‘ŗ°£
EděťģĒ(d®°ng)ŃŅŹó–‘ń£ŃŅĺ÷ľ‘£¨ £¨”…”ŕE1ļÕE1∂ľ «šď≤ńĶńŹó–‘ń£ŃŅ”ķőŘ£¨ňý“‘Ed=E1=2.1°Ń105
£¨”…”ŕE1ļÕE1∂ľ «šď≤ńĶńŹó–‘ń£ŃŅ”ķőŘ£¨ňý“‘Ed=E1=2.1°Ń105
N/mm2
PJěťģĒ(d®°ng)ŃŅ«ķ¬ įŽŹĹ“ęŐ¨£¨PJ=
FJmaxěťľ§≤®∆ųŇcÉ»(n®®i)ĚL◊”÷ģťgĶń◊ÓīůäZѶ£¨Ņ…ĹŁľŔ”√FJmĀŪīķŐś‘›ĪĘ£¨”… Ĺ£®3.19£©Ņ…Ķ√£ļ

ěť«ů…Ō Ĺ÷–Ķń◊Óīů÷Ķ ◊◊į£¨Ņ…ĆĘáßļŌ∂®őĽĹ«‘ŕ∆š»°÷Ķ∑∂áķÉ»(n®®i)ŖM(j®¨n)––“ĽĺSň—ňųĪßĶš°£
[¶“]HJěťľ§≤®∆ųŇcÉ»(n®®i)ĚL◊”ňý”√≤ńŃŌĶń◊Ó–°‘S”√Ĺ””|Ď™(y®©ng)Ѷ°£
3.4.2É»(n®®i)żX»¶ŇcÕ‚ĚL◊”÷ģťgĶńĹ””|Ď™(y®©ng)Ѷ
”…”ŕÉ»(n®®i)żX»¶żXņ™…ŌłųĹ””|Łc(di®£n)∂ľ”–ƶ(du®¨)Ď™(y®©ng)Ķń«ķ¬ …ř≥•£¨“ÚīňÕ‚ĚL◊”ŇcÉ»(n®®i)żX»¶ĶńĹ””|√ŗŃŪ£¨Ņ…Ņī◊ų «É…āÄ(g®®)ň≤ēr(sh®™)ąA÷ýůwĶńĹ””|£¨‘ŕƶ(du®¨)Ď™(y®©ng)”ŕÉ»(n®®i)żX»¶żXņ™ĶńżXŪĒ≤Ņ∑÷…ūľÝ£¨ŌŗģĒ(d®°ng)”ŕÉ…āÄ(g®®)ąA÷ýůwÕ‚Ĺ””|“Ő√ߣ¨‘ŕƶ(du®¨)Ď™(y®©ng)”ŕÉ»(n®®i)żX»¶żXņ™ĶńżXłý≤Ņ∑÷£¨ŌŗģĒ(d®°ng)”ŕÉ…āÄ(g®®)ąA÷ýůwÉ»(n®®i)Ĺ””|’ś÷…°£”…”ŕÉ»(n®®i)żX»¶ņŪ’ďżXņ™«ķĺÄ…ŌłųŁc(di®£n)Ķń«ķ¬ įŽŹĹ≤ĽÕ¨«ß≥Ż£¨łųŁc(di®£n)Ķń◊ų”√Ѷ“≤≤ĽŌŗĶ»£¨“Ú∂Ý‘ŕļ’∆ĚĎ™(y®©ng)ѶĻę ĹŇ©ĶŘ£¨–Ť«ů≥ŲFN/PNĶń◊Óīů÷ĶőůńŅ£¨◊ÓīůĹ””|Ď™(y®©ng)Ѷ¶“HNěť£ļ
…Ō Ĺ÷–k2ěťÕ‚ĚL◊”÷––ń‹ČŘEĶńŌŗƶ(du®¨)«ķ¬ £¨‘ŕżXŪĒ≤Ņ∑÷∆š÷Ķěť’ż”Ŗž™£¨‘ŕżXłý≤Ņ∑÷∆š÷Ķěťōď(f®ī)÷ŠňĹ°£
ěť«ů…Ō ĹĶń◊Óīů÷Ķ£¨ ◊Ō»ĹoáßļŌ∂®őĽĹ«‘ŕ∆š»°÷Ķ∑∂áķÉ»(n®®i)÷ł∂®»Űł…āÄ(g®®)Žx…ĘŁc(di®£n)ń‹’ś£¨Ć¶(du®¨)”ŕ‘ŕ√ŅāÄ(g®®)Žx…ĘŁc(di®£n)…ŌĶń»°÷ĶŃř—Ō£¨∂ľ∑÷Ąe”č(j®¨)ň„≥ŲłųĻ§◊ųÕ∆óUňýĎ™(y®©ng)ĶńFN/PN£¨»°∆š÷–◊Óīů’Ŗ∑ŘÓŪ°£»Ľļůį—»°√ŅāÄ(g®®)Žx…ĘŁc(di®£n)ēr(sh®™)ňýƶ(du®¨)Ď™(y®©ng)Ķń◊ÓīůFN/PN‘ŔŖM(j®¨n)––Ī»›^ŐŘ‘ľ£¨Ņ…«ůĶ√ °£
°£
