ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─äė┴”Ę┬šµ
5.1ę²čį
╚╬║╬ÖCąĄČ╝ėą▀\äėŠ▄░╔Ż¼╚╬║╬ÖCąĄČ╝╩▄ĄĮ┴”Ą─ū„ė├░¦─╣Ż¼Ė„ĘNÖCąĄę“╩▄ĄĮ┴”Ą─ū„ė├Č°▀\äėęąŲ└Ż¼į┌▀\äėųąėųĢ■«a(ch©Żn)╔·┴”╝»╠┐ĪŻš²╩Ūė╔ė┌┴”║═▀\äėĄ─ŽÓ╗źė░Ēæ┼▌ūņŻ¼▓┼╩╣äė┴”īWå¢Ņ}ŽÓ«ö?sh©┤)─Å═ļs│¾ŪŲŻ¼▀@ę╗³cį┌┐šķgÖCśŗųą¾w¼F(xi©żn)Ė³╩Ū═╗│÷Ė╠═┴ĪŻė╔Ū░├µĄ─Ęų╬÷┐╔ų¬Ż¼╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„ÖCśŗ╩Ūę╗ĘN▀\äėęÄ(gu©®)┬╔ĘŪ│ŻÅ═ļsĄ─┐šķgÖCśŗ░Ēą┌Ż¼╦³Ą─äė┴”Ęų╬÷ūį╚╗╩«ĘųÅ═ļs╗³Ų┴Ż¼╚ńė├╩ų╣ż╚źėŗ╦ŃÄū║§▓╗┐╔─▄ĪŻ
äė┴”Ęų╬÷╩Ū▀MąąÖCąĄįOėŗĄ─╗∙ĄA╬„╣įĪŻų╗ėą═©▀^äė┴”Ęų╬÷ų¬Ą└╬’¾wĄ─╩▄┴”ĀŅør║³└ŲŻ¼▓┼┐╔į┌ÖCąĄįOėŗųąī”╬’¾w▀MąąÅŖČ╚ĪóäéČ╚╗±Ą±ĪóŲŻä┌▒Ī─ÕĪóē█├³Ą╚ÖCąĄąį─▄▀Mąąėŗ╦Ń╩šĄĘĪŻė╔┤╦Ż¼äė┴”Ęų╬÷Ą─ųžę¬ąį┐╔ęŖę╗░▀Ōų┐¼ĪŻ
ė╔ė┌äė┴”īW蹊┐Ą─Å═ļsąį░š░¼Ż¼╚╦éā│Ż│Żę²╚ļę╗ą®╝┘Č©Ż¼╩╣å¢Ņ}║å╗»ŠĪ┼”ĪŻėąĢr▀@ĘN╝┘Č©¤oĻPŠoę¬Ė└“ŪŻ¼ėąĢrätĢ■ī¦ų┬ėŗ╦ŃĄ─╩¦š`ĪŻĄ½ļSų°╔·«a(ch©Żn)īŹ█`Ą─░l(f©Ī)š╣┼¹ĘĪŻ¼ī”äė┴”īWĘų╬÷Ą─£╩┤_Č╚╠ß│÷┴╦ą┬Ą─ę¬Ū¾ąļ╗┴ĪŻ╚ń╣¹╚į┼f▓╔ė├ņoæB(t©żi)┤·╠µäėæB(t©żi)Ą─ņo┴”īWĘĮĘ©║═║ŃČ©äėæB(t©żi)┤·╠µūāäėäėæB(t©żi)Ą─äėæB(t©żi)ņo┴”īWĘĮĘ©Ż¼ätĖ∙▒Š▓╗─▄ØMūŃĘų╬÷Ą─ę¬Ū¾│╝Ą·ĪŻ×ķ┤╦▒žĒÜ▀Mąąšµš²Ą─äė┴”īWĘų╬÷╗“ÅŚąįäė┴”īWĘų╬÷č╬─ÕĪŻ
┴”īW└ĒšōĄ─░l(f©Ī)š╣ĪóļŖūėėŗ╦ŃÖCĄ─Ė─▀M║═ÅVĘ║æ¬ė├×ķäė┴”īWĘų╬÷ĘĮĘ©╠ß╣®┴╦└Ēšō╗∙ĄA║═īŹ█`╩ųČ╬ė╗├▀ĪŻ─┐Ū░į┌▒ŖČÓĄ─CAD└┐╚»ĪóCAE▄ø╝■ųąŻ¼ADAMSęįŲõ▌^ÅŖĄ─▀\äėīWė└궯¼äė┴”īWĘų╬÷╣”─▄į┌▒ŖČÓ╣ż│╠ŅIė“└’½@Ą├┴╦ÅVĘ║Ą─æ¬ė├┤¦┐ęŻ¼└¹ė├╦³─▄▌^║├Ą─ĮŌøQ╔Ž╩÷Ą─äė┴”īWå¢Ņ}ĪŻ
▒Šš┬└¹ė├ADAMS▄ø╝■╠┐╝²Ż¼ī”Ą┌╦─š┬ųąĮ©┴óĄ─ļp┬ō(li©ón)╚²▓µŚU╚fŽ“┬ō(li©ón)▌SŲ„▀MąąČÓäé¾wĄ─äė┴”Ęų╬÷ę╗ŽźŻ¼Ą├ĄĮ┴╦ę╗ą®ėąė├Ą─Īó┐╔ęĢ╗»Ą─ĮY╣¹Š·╦ŠĪŻ
5.2└Ēšō▒│Š░
5.2.1ÖCąĄäė┴”īW║åĮķ
ÖCąĄäė┴”īW蹊┐ÖCąĄį┌┴”ū„ė├Ž┬Ą─▀\äė║═į┌▀\äėųą«a(ch©Żn)╔·┴”Ą─┐ŲīW╣╦└░ĪŻė╔ė┌ÖCąĄ«a(ch©Żn)ŲĘĄ─Ė▀╦┘╗»ĪóŠ½├▄╗»═┌╬ĖĪó▌p┴┐╗»įė░ąĪó┤¾╣”┬╩╗»Ą─░l(f©Ī)š╣┌ģŽ“▓╗öÓ┤┘╩╣ÖCąĄäė┴”īWĄ─░l(f©Ī)š╣Ż¼ę¬Ū¾╠ß│÷Ė³Š½┤_Į┤č╝ĪóĖ³šµīŹĄ─Ę┤ė│┐═ė^īŹļHĄ─äė┴”īWĘų╬÷ĘĮĘ©Č°▐ŚēęįŪ░į┌ėŗ╦ŃųąĄ─įSČÓ╝┘įO║═║å╗»┬┐ÕĪŻ
į┌ÖCąĄäė┴”īW░l(f©Ī)š╣Ą─▀^│╠ųą«a(ch©Żn)╔·┴╦╚ńŽ┬╦─ĘNĘų╬÷ĘĮĘ©Ż║
ņo┴”īWĘų╬÷Ż©Static AnalysisŻ®ĪŻī”ė┌Ą═╦┘ÖCąĄ░╝╦ĶŻ¼į┌▀\äėųąĄ─æTąį┴”┐╔ęį║÷┬į▓╗ėŗ╦ĖĄŪĪŻį┌ÖCąĄ▀\äė▀^│╠ųąĄ─Ė„éĆ╬╗ų├▓╔ė├ņo┴”ŲĮ║ŌĄ─ĘĮĘ©Ū¾ĮŌŻ╗
äėæB(t©żi)ņo┴”īWĘų╬÷Ż©Kineto-Static AnalysisŻ®╬Ąę©ĪŻļSų°ÖCąĄĄ─╦┘Č╚Ą─╠ßĖ▀Č³▓ūŻ¼æTąį┴”▓╗─▄į┘▒╗║÷┬įĪŻ╝┘Č©śŗ╝■░┤└ĒŽļĄ─ęÄ(gu©®)┬╔▀\äėČ─╠╔Ż¼└¹ė├▀_└╩žÉĀ¢įŁ└ĒŪ¾ĮŌ└Ū╬■Ż╗
äė┴”īWĘų╬÷Ż©Dynalnic AnalysisŻ®Ž█Č∙ĪŻė╔ė┌į┌Ė„ĘN┴”Ą─ū„ė├Ž┬Ż¼ÖCąĄ▓ó▓╗─▄ŠS│ų└ĒŽļĄ─▀\äėęÄ(gu©®)┬╔▀@ę╗╝┘Č©╩Ūį┐Ż¼į┌Ęų╬÷ųą└č╣║Ż¼░čįŁäėęÄ(gu©®)░³└©į┌ÖCąĄŽĄĮy(t©»ng)ų«ā╚(n©©i)üĒ▀MąąĘų╬÷ĪŻ
ÅŚąįäė┴”īWĘų╬÷Ż©Elasto-dynamics AnalysisŻ®Ę∙└ÓĪŻį┌Ū░╚²ĘNĘų╬÷ĘĮĘ©ųą╔▄Ų▓Ż¼śŗ╝■Š∙▒╗╝┘Č©×ķäéąįĄ─Ż¼Ą½ļSų°ÖCąĄ▌p┴┐╗»Ą─░l(f©Ī)š╣╦╔š¬Ż¼śŗ╝■╚ßąį╝ė┤¾Ż¼▀\▐D╦┘Č╚╠ßĖ▀┬┼ėĄŻ¼æTąį╝▒äĪį÷┤¾╚ķš╗Ż¼į┌▀@ĘNŪķørŽ┬Ż¼śŗ╝■Ą─ÅŚąįūāą╬Ģ■ĮoÖCąĄ▀\äėĄ─▌ö│÷ĦüĒš`▓Ņ╩Ż┐źĪŻ
ÖCąĄÅŚąįäė┴”īW╩ŪÖCąĄäė┴”īW░l(f©Ī)š╣Ą─ą┬ļAČ╬ūķ╔╦Ż¼╦³čąŠ┐░čÖCąĄĄ─śŗ╝■┐┤ū„╩ŪÅŚąįĄ─Č°▓╗╩ŪäéąįĢrĄ─ÖCąĄ▀\äėĀŅæB(t©żi)Ż¼ęį╝░×ķęųųŲÅŚąįäė┴”Ēææ¬Č°▓╔╚ĪĄ─┤ļ╩®║═ŽÓæ¬Ą─ÖCąĄįOėŗĘĮĘ©╝Ó┴ŁĪŻ─┐Ū░▀@ĘNĘĮĘ©ęčĄ├ĄĮ┴╦ÅVĘ║Ą─æ¬ė├ę┼ų╚ĪŻ
5.2.2ADAMSųąĄ─äė┴”īWĘĮ│╠
ADAMSųą▓╔ė├└ŁĖ±└╩╚š│╦ūėĘ©Į©┴óŽĄĮy(t©»ng)äė┴”ĘĮ│╠
═Ļš¹╝s╩°ĘĮ│╠

Ż©qŻ¼tŻ®=0
ĘŪ═Ļš¹╝s╩°ĘĮ│╠”╚(q└■ĘęŻ¼

ę’Ž┴Ż¼t)=0
ŲõųąŻ║
TĪ¬Ī¬ŽĄĮy(t©»ng)äė─▄Ż╗
qĪ¬Ī¬ŽĄĮy(t©»ng)ÅV┴xū°ś╦┴ąĻć╚ņ░°Ż╗

Ī¬Ī¬ÅV┴x┴”┴ąĻć└▄╦╗Ż╗
pĪ¬Ī¬ī”æ¬ė┌═Ļš¹╝s╩°Ą─└Ł╩Ž│╦ūė┴ąĻćŻ╗
”╠Ī¬Ī¬ī”æ¬ė┌ĘŪ═Ļš¹╝s╩°Ą─└Ł╩Ž│╦ūė┴ąĻć╗ąĘńŻ╗
═©▀^Ū¾ĮŌ┤╦╬óĘųĘĮ│╠Ą─öĄ(sh©┤)ųĄĮŌ▒─┐±Ż¼╝┤┐╔Ą├ĄĮĮY╣¹ĪŻ
5.3ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─äė┴”Ę┬šµ
5.3.1Ęų╬÷─Żą═Ą─Į©┴ó
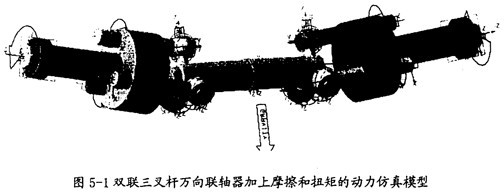
▒ŠĘų╬÷─Żą═╩Ūį┌Ą┌╦─š┬ųąĄ─▀\äėĘų╬÷─Żą═Ż©łD4-18Ż®Ą─╗∙ĄA╔Ž═©▀^│²╚ź▀\äė“īäė┼¾▒߯¼╝ė╔Ž“īäė┴”┐Łą©Īó─”▓┴┴”Č°Ą├ĄĮłD5-1╦∙╩ŠĄ─äė┴”Ę┬šµ─Żą═ĪŻ
─┐Ū░į┌╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„äė┴”Ęų╬÷ĘĮ├µĮ§─╝Ż¼╦∙░l(f©Ī)▒ĒĄ─šō╬─┤¾ČÓ╩Ūį┌║÷┬į─”▓┴┴”┼cæTąį┴”Ą─Śl╝■Ž┬▀MąąĄ─░┌══Ż¼āH╩Ūū„ūŅ╗∙ĄAĄ─ņo┴”īWĘų╬÷Ż¼╗“╩Ū┐╝æ]ĄĮ║ŃČ©─”▓┴║═æTąį┴”Ą─äėæB(t©żi)ņo┴”īWĘų╬÷ė∙╠▓ĪŻČ°į┌īŹļHæ¬ė├ųą┼Ė┼ĪŻ¼─”▓┴▓╗āH╩Ū┬ō(li©ón)▌SŲ„īŹļH╩¦ą¦Ą─ų„ę¬įŁę“ų«ę╗Ż¼Č°Ūę╩Ūė░Ēæą¦┬╩Ą─ų„ę¬ę“╦žŽ„ĮŌŻ¼┴Ē═Ōį┌┬ō(li©ón)▌SŲ„Ė▀╦┘▀\▐DųąæTąį┴”╩Ū▓╗┐╔║÷┬įĄ─ųžę¬ę“╦ž│»š²ĪŻę“┤╦▒Šš┬į┌┐╝æ]ĄĮ─”▓┴║═æTąį┴”Ą─ŪķørŽ┬š¶░▄Ż¼▀Mąąšµš²Ą─äė┴”īWĘų╬÷Ż©ČÓäé¾wŽĄĮy(t©»ng)Ż®Ż¼▒žČ©Ģ■Ą├│÷╚½ą┬Ą─ĮY╣¹┼®ŽļŻ¼×ķ▀@ĘN┬ō(li©ón)▌SŲ„Ą─▀Mę╗▓Į蹊┐č┼╣┴Īóķ_░l(f©Ī)┤“Ž┬╗∙ĄAĪŻ
5.3.1.1Į©┴ó─Żą═Ą─Ą─ĻPµI³c
5.3.1.1.1─”▓┴┴”Ą─╩®╝ė
į┌ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą──Żą═ųą└²├źŻ¼ŽÓ╗ź▀\äėĄ─śŗ╝■▌^ČÓč┴ųóŻ¼Ė„éĆśŗ╝■ų«ķgĄ─╗ŅäėĮėė|├µČ╝Ģ■«a(ch©Żn)╔·─”▓┴┴”Ą─ū„ė├Ż¼▓╗═¼Ą─▀\äėĖ▒ą╬╩ĮŽ┐╩“Ż¼─”▓┴«a(ch©Żn)╔·Ą─üĒį┤ę▓▓╗ę╗śė╔„ĮėŻ¼į┌╩®╝ė─”▓┴Ģrę¬Ė∙ō■(j©┤)▓╗═¼Ą──”▓┴üĒį┤┐╝æ]Ė„ę“╦žĄ─ė░ĒæĪŻį┌▒Šš┬Ą─Ęų╬÷ųąŠė┤«Ż¼Ė„éĆ▀\äėĖ▒ķgČ╝▒╗╝ė╔Ž┴╦─”▓┴┴”ę®═²ĪŻė╔ė┌╔µ╝░ĄĮ┴╦╚ńŽ┬╦─ĘN▀\äėĖ▒Ż¼¼F(xi©żn)ī”╦³éā─”▓┴┴”╩®╝ėĄ─┐╝æ]ę“╦žū„╚ńŽ┬Ą─ĻÉ╩÷Ż║
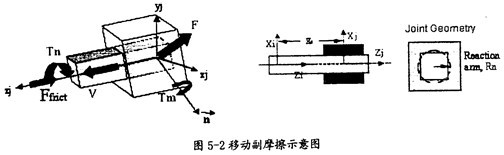
ęŲäėĖ▒Ż║
ęŲäėĖ▒«a(ch©Żn)╔·─”▓┴Ą─╩ŠęŌłD╚ńłD5-2╦∙╩Šū½š³ĪŻį┌▀@ĘN▀\äėĖ▒ųąų╗Ģ■«a(ch©Żn)╔·─µŽ“ė┌ęŲäėĘĮŽ“vŻ©╚ńłD5-2ųą╦{╔½╝²Ņ^╦∙╩ŠŻ®Ą──”▓┴┴”FfrictŻ©╚ńłD5-2ųą╝t╔½╝²Ņ^╦∙╩ŠŻ®,╦³Ą─«a(ch©Żn)╔·ų„ę¬ė╔╚²ĘNę“╦žĄČųńŻ¼╝┤śŗ╝■ķgŽÓ╗źū„ė├Ą─ÅĮŽ“┴”FĪóśŗ╝■ķgŽÓ╗źū„ė├Ą─┼żŠžTn╦Ž╚÷Īóśŗ╝■ķgŽÓ╗źū„ė├Ą─ÅØŠžTmŻ©▀@╚²ĘN┴”╚ńłD5-2ųąŠG╔½╝²Ņ^╦∙╩ŠŻ®╗ļ║±ĪŻį┌╩®╝ėė╔▀@ą®ū„ė├┴”«a(ch©Żn)╔·Ą──”▓┴┴”ĢrŻ¼ę¬┐╝æ]ÅĮŽ“┴”FĄ─┤¾ąĪĖ∙║ąĪóĄ╚ą¦ū„ė├▒█ķLRnŻ©╚ńłD5-2ųąėę▀ģłD╦∙╩Š▀\äėĖ▒ķgĄ─ųž»B┴┐║═ųž»B┴┐Ą─ūā╗»ŪķørŪ»Ę∙Īó┼żŠžTnĄ─┤¾ąĪ║═╦³Ą─Ą╚ą¦Ę┤ū„ė├▒█ķLRnĪóÅØŠžTmĄ─┤¾ąĪ║═ÅØŠžĄ─Ę┤ū„ė├▒█ķLXSŻ©╚ńłD5-2ųąķgłD╦∙╩ŠŻ®ųŻŽ¾ĪŻ┴Ē═Ō▀ĆĄ├┐╝æ]ņo─”▓┴ŽĄöĄ(sh©┤)╣▒šŌĪóäė─”▓┴ŽĄöĄ(sh©┤)╝░ŅA▌d║╔Ą─ū„ė├ĪŻ
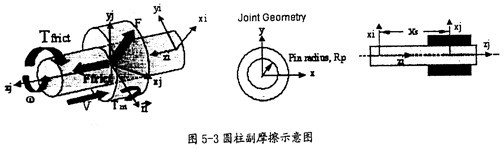
łAų∙Ė▒Ż║
łAų∙Ė▒«a(ch©Żn)╔·─”▓┴Ą─╩ŠęŌłD5-3╦∙╩Š│¦ķ╗ĪŻį┌▀@ĘNäėäėĖ▒ųąĢ■«a(ch©Żn)╔·─µŽ“ė┌ęŲäėĘĮVŻ©╚ńłD5-3ųą╦{╔½╝²Ņ^╦∙╩ŠŻ®Ą──”▓┴┴”FfrictŻ©╚ńłD5-3ųą╝t╔½╝²Ņ^╦∙╩ŠŻ®╝░─µŽ“ė┌ą²▐DĘĮŽ“”žŻ©╚ńłD5-3ųą╦{╔½╝²Ņ^╦∙╩ŠŻ®Ą──”▓┴┼żŠžFfrictŻ©╚ńłD5-3ųą╝t╔½╝²Ņ^╦∙╩ŠŻ®ĖŪĮ├Ż¼╦³Ą─«a(ch©Żn)╔·ų„ę¬ė╔ā╔ĘNę“╦žŻ¼╝┤śŗ╝■ķgŽÓ╗źū„ė├Ą─ÅĮŽ“┴”F╗„─╠Īóśŗ╝■ķgŽÓ╗źū„ė├Ą─ÅØŠžTmŻ©▀@ā╔ĘN┴”╚ńłD5-3ųąŠG╔½╝²Ņ^╦∙╩ŠŻ®▒▓╦½ĪŻį┌╩®╝ė▀@ą®ū„ė├┴”«a(ch©Żn)╔·Ą──”▓┴┴”ĢrŻ¼ę¬┐╝æ]ÅĮŽ“┴”FĄ─┤¾ąĪ╣±└∙ĪółAų∙░ļÅĮRPŻ©╚ńłD5-3ųąķgłD╦∙╩ŠŻ®┼╚═¹Īó▀\äėĖ▒ķgĄ─ųž»B┴┐║═ųž»B┴┐Ą─ūā╗»ŪķørĪóÅØŠžTmĄ─┤¾ąĪ║═ÅØŠžĄ─Ę┤ū„ė├▒█ķLXsŻ©╚ńłD5-2ųąėęłD╦∙╩ŠŻ®Ęę─¬Ż¼┴Ē═Ō▀ĆĄ├┐╝æ]ņo─”▓┴ŽĄöĄ(sh©┤)┴²═“Īóäė─”▓┴ŽĄöĄ(sh©┤)╝░ŅA▌d║╔Ą─ū„ė├ĪŻ
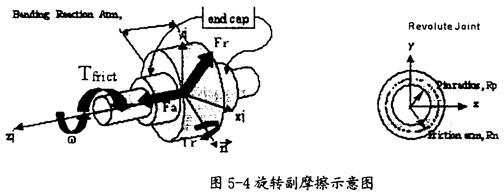
ą²▐DĖ▒Ż║
ą²▐DĖ▒«a(ch©Żn)╔·─”▓┴Ą─╩ŠęŌłD╚ńłD5-4╦∙╩Šų┌▒╗ĪŻį┌▀@ĘN▀\äėĖ▒ųąų╗Ģ■«a(ch©Żn)╔·─µŽ“ė┌ą²▐DĘĮŽ“╝“ą®ĪŻŻ©╚ńłD5-4ųą╦{╔½╝²Ņ^╦∙╩ŠŻ®Ą──”▓┴┼żŠžTfrictŻ©╚ńłD5-4ųą╝t╔½╝²Ņ^╦∙╩ŠŻ®“╚į÷Ż¼╦³Ą─«a(ch©Żn)╔·ų„ę¬ė╔╚²ĘNę“╦žŻ¼╝┤śŗ╝■ķgŽÓ╗źū„ė├Ą─ÅĮŽ“┴”Fr└ķ┴├Īóśŗ╝■ķgŽÓ╗źū„ė├Ą─▌SŽ“┴”Fa╝∙╝─Īóśŗ╝■ķgŽÓ╗źū„ė├Ą─ÅØŠžTrŻ©▀@╚²ĘN┴”╚ńłD5-4ųąŠG╔½╝²Ņ^╦∙╩ŠŻ®ĪŻį┌╩®╝ėė╔▀@ą®ū„ė├┴”«a(ch©Żn)╔·Ą──”▓┴┴”Ģr╗║ŠŽŻ¼ę¬┐╝æ]ÅĮŽ“┴”FrĄ─┤¾ąĪķ▌ĮźĪółAų∙░ļÅĮRPŻ©╚ńłD5-4ėęłD╦∙╩ŠŻ®Īó▌SŽ“┴”FaĄ─┤¾ąĪꥥųĪó─”▓┴░ļÅĮRnĄ─┤¾ą╠Ļ─┤ĪŻ©╚ńłD5-4ėęłD╦∙╩ŠŻ®ĪóÅØŠžTmĄ─┤¾ąĪ║═ÅØŠžĄ─Ę┤ū„ė├▒█ķLŻ©╝┤ą²▐DĖ▒Ą─ķLČ╚Ž├╦ķŻ¼╚ńłD5-4ųąū¾łD╦∙╩ŠŻ®ė▓Ž╦Ż¼┴Ē═Ō▀ĆĄ├┐╝æ]ņo─”▓┴ŽĄĪóäė─”▓┴ŽĄöĄ(sh©┤)╝░ŅA▌d║╔Ą─ū„ė├į▀─źĪŻ
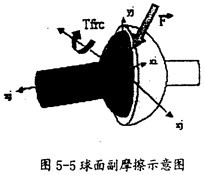
Ū“├µĖ▒Ż║
Ū“├µĖ▒«a(ch©Żn)╔·─”▓┴Ą─╩ŠęŌłD╚ńłD5-5╦∙╩ŠĪŻį┌▀@ĘN▀\äėĖ▒ųąų╗Ģ■«a(ch©Żn)╔·─µŽ“ė┌ą²▐DĘĮŽ“Ą──”▓┴┼żŠžTfrcŻ©╚ńłD5-5ųą╝t╔½╝²Ņ^╦∙╩ŠŻ®═▌┐ŃŻ¼╦³Ą─«a(ch©Żn)╔·ų╗ėąę╗ĘNę“╦ž┴┌╗įŻ¼╝┤śŗ╝■ķgŽÓ╗źū„ė├Ą─ÅĮŽ“┴”FŻ©╚ńłD5-5ųą╗ę╔½╝²Ņ^╦∙╩ŠŻ®ĪŻį┌╩®╝ėė╔ŽÓ╗źū„ė├Ą─ÅĮŽ“┴”F«a(ch©Żn)╔·Ą──”▓┴┴”Ģr╚∙░░Ż¼ę¬┐╝æ]ÅĮŽ“┴”FĄ─┤¾ąĪ║═Ū“░ļÅĮųĄ║¦Ż¼┴Ē═Ō▀ĆĄ├┐╝æ]ņo─”▓┴ŽĄöĄ(sh©┤)Īóäė─”▓┴╦„öĄ(sh©┤)╝░ŅA▌d║╔Ą─ū„ė├ęŲ╣·ĪŻ
į┌▀@ę╗▀^│╠ųąĘųäeī”20éĆ▀\äėĖ▒╠Ē╝ė┴╦─”▓┴┴”ų©┤±Ż¼▀@ą®┴”į┌Ę┬šµųąīóĢ■ļSų°ĪŻ╦³éāĄ─«a(ch©Żn)╔·ę“╦žĄ─ūā╗»Č°ūā╗»╝Żū║ĪŻ▀@į┌║¾├µĄ─ĮY╣¹ųą┐╔ęįęŖĄĮ╩╣─ļĪŻ
5.3.1.1.2“īäė┴”Ą─╩®╝ė
į┌äė┴”Ę┬šµųąŻ¼ī”╬óĘųĘĮ│╠Ą─Ū¾ĮŌė├Ą─Č╝╩Ūė├öĄ(sh©┤)ųĄėŗ╦ŃĄ─ĘĮĘ©ūŻČ«Ż¼į┌Ą³┤·Ū¾ĮŌĄ─▀^│╠ųąŲ▒ęĪŻ¼▓ĮķL▓╗┐╔▀^ķLŻ¼╚ń╣¹▓ĮķL╠½┤¾┤▄═·Ż¼ätį┌öĄ(sh©┤)ųĄėŗ╦ŃųąĢ■▓╗╩šö┐╣▓Ą┐Ż¼ī¦ų┬Ę┬šµĄ─╩¦öĪĪŻį┌äė┴”Ę┬šµųąąėūŽŻ¼╚ń╣¹ęÄ(gu©®)Č©┴╦Ģrķg▓ĮĄ─▓ĮķLĖŲ╠▒Ż¼ėų╠Ē╝ė┴╦▀^┤¾Ą─“īäė┴”Ż¼ätį┌Ę┬šµųą╬’¾wį┌▌^Č╠Ą─Ģrķgā╚(n©©i)Ģ■░l(f©Ī)╔·║▄┤¾Ą─┐šķg╬╗ęŲ╔ĻšßŻ¼į┌▀@ĘNŪķørŽ┬║ŅįęŻ¼öĄ(sh©┤)ųĄėŗ╦Ńīó║▄┐╔─▄▓╗╩šö┐Ż«╣╩į┌▀Mąąäė┴”Ę┬šµųą░ż─╠Ż¼æ¬ūīš¹éĆūā╗»▀^│╠ŲĮŠÅĄ─▀MąąŻ¼Ę┬ų╣│÷¼F(xi©żn)╔Ž╩÷Ą─¼F(xi©żn)Ž¾▒ó┴╦ĪŻ
į┌ADAMSųą╠ß╣®┴╦ļA╠▌║»öĄ(sh©┤)Ż©STEP║»öĄ(sh©┤)Ż®Ųė╩„Ż¼╦³┐╔ęįū„×ķĮŌøQ▀@ę╗å¢Ņ}Ą─╣żŠ▀ĪŻSTEP║»öĄ(sh©┤)║å╩÷╚ńŽ┬Ż║
į┌ADAMSųą╦„│█Ż¼STEP║»öĄ(sh©┤)Į³╦Ųę╗éĆś╦£╩Ą─öĄ(sh©┤)īWSTEP║»öĄ(sh©┤)Ż©ø]ėą▓╗▀B└m(x©┤)ąįŻ®,▓óų▓Į▒ŲĮ³öĄ(sh©┤)ųĄšź▓čŻ¼└²╚ńŻ║“īäė╗“š▀┴”Ż¼Ž“╔Ž╗“š▀Ž“Ž┬╗“š▀┤“ķ_║═ĻPķ]╝╦ĖĪĪŻ╦³Ą─║»öĄ(sh©┤)łDą╬╚ńłD5-6╦∙╩ŠĘ▐ŽŅĪŻĖ±╩Į═¼Ė„ģóöĄ(sh©┤)šf├„╚ńŽ┬Ż║
Ė±╩ĮŻ║STEP(x,x0,h0,xl,hl)
ģóöĄ(sh©┤)šf├„Ż║
xę╗ūįūā┴┐Ż¼┐╔ęį╩ŪĢrķg╗“ĢrķgĄ─╚╬ę╗║»öĄ(sh©┤)│Ū╬ĶŻ╗
x0ę╗ūįūā┴┐Ą─STEP║»öĄ(sh©┤)ķ_╩╝ųĄą∙┤źŻ¼┐╔ęį╩Ū│ŻöĄ(sh©┤)╗“║»öĄ(sh©┤)▒Ē▀_╩Į╗“įOėŗūā┴┐Ż╗
x1ę╗ūįūā┴┐Ą─STEP║»öĄ(sh©┤)ĮY╩°ųĄ╝ęČ߯¼┐╔ęį╩Ū│ŻöĄ(sh©┤)═čų∙Īó║»öĄ(sh©┤)▒Ē▀_╩Į╗“įOėŗūā┴┐Ż╗
h0ę╗STEP║»öĄ(sh©┤)Ą─│§╩╝ųĄ└Ł▓÷Ż¼┐╔ęį╩Ū│ŻöĄ(sh©┤)šź╬¬ĪóįOėŗūā┴┐╗“Ųõ╦³║»öĄ(sh©┤)▒Ē▀_╩ĮŻ╗
h1ę╗STEP║»öĄ(sh©┤)Ą─ūŅĮKųĄ╗═▄ŅŻ¼┐╔ęį╩Ū│ŻöĄ(sh©┤)╦µ╣ļĪóįOėŗūā┴┐╗“Ųõ╦³║»öĄ(sh©┤)▒Ē▀_╩ĮŻ╗
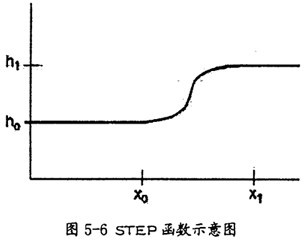
Å─ęį╔Žšf├„ųą┬¹Ė»Ż¼┐╔ęįų¬Ą└Šž└ųŻ¼STEP║»öĄ(sh©┤)─▄╩╣öĄ(sh©┤)ųĄų«ķgĄ─▀^Č╚ŲĮŠÅĪŻį┌▒Š┤╬Ę┬šµųąš²╩Ū└¹ė├┴╦▀@ę╗³c╗ž┬█Ż¼į┌╩®╝ė“īäė┴”Ģr▓╔ė├┴╦┤╦║»öĄ(sh©┤)┴Ą▓┬Ż¼ūī“īäė┴”Å─OŲĮŠÅ▀^Č╚ĄĮę╗éĆ▌^┤¾Ą─ųĄŻ¼╩╣Ę┬šµŲĮĘĆ(w©¦n)Ąž▀MąąŪńŽ¹Ż¼▒▄├Ō┴╦░l(f©Ī)╔ó¼F(xi©żn)Ž¾š²├ĒĪŻ
į┌▀@ę╗▀^│╠ųąĘųäeį┌▌ö╚ļ▌S═¼ų¦│ąķgĄ─ą²▐DĖ▒╝░▌ö│÷▌S═¼ų¦│ąķgĄ─ą²▐DĖ▒╔Ž╠Ē╝ė┴╦STEP║»öĄ(sh©┤)┴”Šž“īäėŻ©▌ö│÷▌S═¼ų¦│ąķgĄ─ą²▐DĖ▒╔ŽĄ─“īäėū„×ķžō▌dŻ¼▌ö╚ļ▌S═¼ų¦│ąķgĄ─ą²▐DĖ▒╔ŽĄ─“īäėū„×ķų„äė┴”ŠžŻ®┼„ųūĪŻ
5.3.1.2─Żą═Ą─Öz“×
Į©┴ó║├─Żą═║¾ąŅ░ŌŻ¼ī”─Żą═▀MąąÖz“ׯ¼ĮY╣¹╚ńŽ┬Ż║
─Żą═ųą╣▓ėą15éĆśŗ╝■šß│ąŻ╗
ėą6éĆłAų∙Ė▒┬ŻĖ°Ż¼2éĆą²▐DĖ▒Ż¼6éĆŪ“├µĖ▒Ż¼6éĆęŲäėĖ▒╚ņĮ«Ż╗
─Żą═╣▓ėą8éĆūįė╔Č╚Ż©GruebleröĄ(sh©┤)Ż®šūĮ╣Ż¼Ūę├┐éĆ╝s╩°Š∙×ķ▒žę¬Ż¼¤o╚▀ėÓė└Ņ§Ż╗Ż©┤╦▀^│╠’@╩ŠĘŪ│Żųžę¬╔·═ļŻ¼╚ń╣¹Öz“×ųąėą╚▀ėÓĄ─╝s╩°Ż¼ätį┌Ū¾ĮŌĄ─▀^│╠ųą╝▌┐▀Ż¼ADAMSĢ■│²╚ź▀@ą®╝s╩°Ūņ├©Ż¼Ą½│²╚ź▀@ą®╝s╩°į┌─ŪéĆ▀\äėĖ▒╔Ž╩Ū▓╗┐╔┐žųŲĄ─Ż¼─ŪśėĄ─║¾╣¹╩Ūį┌äė┴”Ę┬šµųąųąĄ├ĄĮĄ─▀\äėĖ▒╔ŽĄ─Ę┤ū„ė├┴”Š═▓╗š²┤_╔┬ńŻ¼ų╗─▄═©▀^į┌╚ßąį¾wĄ─äė┴”Ę┬šµųą▓┼┐╔╝ėęįčaŠ╚į┬┼ÓĪŻ┤╦─Żą═ųą╝s╩°š²║├¤o╚▀ėÓŻ¼▀@śėį┌├┐éĆ▀\äėĖ▒ųą╦∙£y┴┐Ą─Ę┤┴”Č╝æ¬╩Ūš²┤_Ą─Č„╝▒ĪŻ)
į┌─Żą═Ą─ā╔Č╦╝ėėąā╔éĆ┴”Šž╔╝ą¾Ż¼-éĆė├ū„ų„äė┴”Šž┴Ē-éĆätė├ū„▒╗äė┴”ŠžŻ╗
į┌├┐éĆ▀\äėĖ▒ųąŠ∙ėą─”▓┴ųį╣¦Ż¼╣▓╩®╝ė20éĆ─”▓┴┴”┤╦Ą■ĪŻ
5.3.2äė┴”Ę┬šµ
═©▀^įOČ©-Č©Ą─Ę┬šµ▓ĮöĄ(sh©┤)Ż¼▀xė├-ĘN▀m║Žė┌äéąįŽĄĮy(t©»ng)Ż©╠žš„ųĄūā╗»┤¾Ą─ŽĄĮy(t©»ng)Ż®╦µųķŻ¼ŪęĘeĘųĘĆ(w©¦n)Č©ąį║├Ą─Ū¾ĮŌŲ„Ż©▒Š┤╬Ę┬šµ▀xė├┴╦MODIFIEDŪ¾ĮŌŲ„░Ķų®ĪŻę“×ķį┌ADAMS╠ß╣®Ą─GEAR,DASSL,MODIFIED,ABAM,SI2▀@╬ÕĘNŪ¾ĮŌŲ„ųąŻ¼GEARč└└÷ĪóDASSLĪóMODIFIEDŪ¾ĮŌŲ„▀m║Žė┌äéąįŽĄĮy(t©»ng)═├╗ĻŻ¼ŪęĘeĘųĘĆ(w©¦n)Č©ąįĄ─ĻPŽĄ×ķŻ║MODIFIED>DASSL>GEARųŻŽŽĪŻŻ®Ż¼▀Mąąäė┴”Ę┬šµą┐╣░Ż¼▓ó▌ö│÷╚ńŽ┬£y┴┐ĮY╣¹Ż║
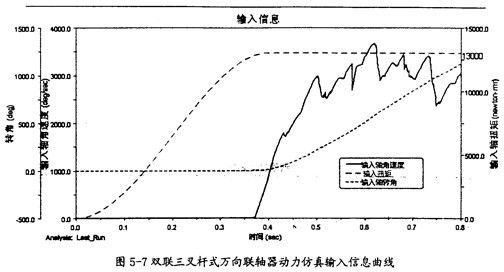
STEP║»öĄ(sh©┤)Ą─ūā╗»Ū·ŠĆŻ©╚ńłD5-7╦∙╩ŠŻ®ųŌČņŻ╗
▌ö╚ļ▌S▐DĮŪĄ─ūā╗»Ū·ŠĆŻ©╚ńłD5-7╦∙╩ŠŻ®Ż╗
▌ö╚ļ▌SĮŪ╦┘Č╚Ą─ūā╗»Ū·ŠĆŻ©╚ńłD5-7╦∙╩ŠŻ®ū╦╩ŃŻ╗
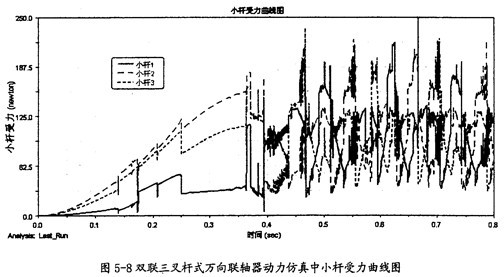
ąĪŚU╩▄┴”Ū·ŠĆŻ©╚ńłD5-8╦∙╩ŠŻ®Ųµ├┼Ż╗
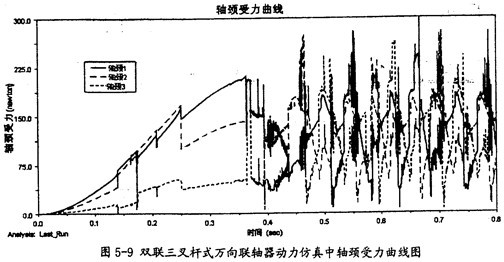
▌SŅi╩▄┴”Ū·ŠĆŻ©╚ńłD5-9╦∙╩ŠŻ®:
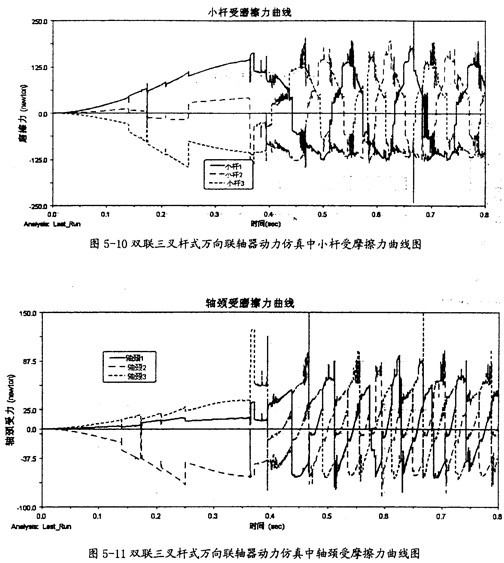
ąĪŚU╩▄─”▓┴┴”Ū·ŠĆŻ©╚ńłD5-10╦∙╩ŠŻ®Ż╗
▌SŅi╩▄─”▓┴┴”Ū·ŠĆŻ©╚ńłD5-11╦∙╩ŠŻ®├»┼ŅŻ╗
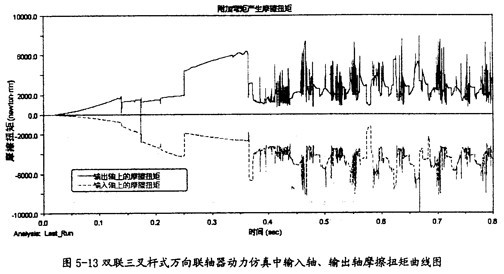
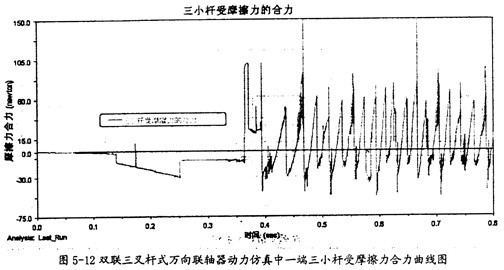
▌ö╚ļ▌SŲ▄å¬Īó▌ö│÷▌Sė╔ĖĮ╝ėÅØŠž«a(ch©Żn)╔·Ą──”▓┴┼żŠžŻ©╚ńłD5-12╦∙╩ŠŻ®ĪŻ
ęį╔Ž╦∙ėąĄ─£y┴┐ĮY╣¹Š∙╩Ūį┌═¼-┤╬Ę┬šµųąĄ├ĄĮ╬ŌŠ¹Ż¼Ę┬šµÜvĢr0.8├ļĮ┘─«Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌Ę┬šµųąĮø(j©®ng)Üv┴╦Å─åóäėĄĮŲĮĘĆ(w©¦n)▓©äėĄ─äėæB(t©żi)▀^│╠ĪŻį┌╦∙ėą┴”Ą─£y┴┐Ū·ŠĆųąŻ¼Ū·ŠĆėą═╗ūā¼F(xi©żn)Ž¾ų¶═õŻ¼▀@-¼F(xi©żn)Ž¾┐╔─▄═¼─Żą═ųąĄ─äé¾w╝┘įOČĄņ¬Ż¼ęį╝░ņo─”▓┴ŽĄöĄ(sh©┤)ĄĮäė─”▓┴ŽĄöĄ(sh©┤)║══╗ūāėąĻPŻ¼╚ń╣¹ė├╚ßąį¾w┤·╠µäé¾wšĻČóŻ¼ŲõĮY╣¹æ¬įōĢ■ŲĮ╗¼ę¶─ŅĪŻĄ½┐éĄ─üĒšfŻ¼▀@└’Ą─Ū·ŠĆį┌-Č©Ą─│╠Č╚╔ŽĘ┤æ¬┴╦▀@ą®┴”Ą─ūā╗»┌ģä▌§’ĖęŻ¼ę▓┐╔ęįū„×ķĘų╬÷Ą─ģó┐╝├ŲĘ▀ĪŻ
5.4Ę┬šµĮY╣¹Ęų╬÷
ė╔łD5-7┐╔ęį┐┤│÷Ż¼ļp┬ō(li©ón)╚²▓µŚU╚fŽ“┬ō(li©ón)▌SŲ„į┌äė┴”Ę┬šµĄ─▀^│╠ųąĖĖĘ߯¼▌ö╚ļ┴”Šžų▓ĮęįSTEP║»öĄ(sh©┤)Ą─┌ģä▌į÷┤¾Ė╬╠ĘŻ¼«öŲõ┐╦Ę■ņo─”▓┴┴”║¾Ż¼ķ_╩╝▐DäėČĻ╔╚Ż¼į┌ĮŪ╦┘Č╚▀_ĄĮę╗Č©Ą─ųĄ║¾╚┴ų“Ż¼│÷¼F(xi©żn)▓©äėĄ─¼F(xi©żn)Ž¾Ż©╝t╔½ŠĆŚl╦∙╩ŠŻ®Ż¼▓óĘŪ╚ńŲĮ│ŻŽļŽ¾Ą─Į³╦ŲĄ╚╦┘▐DäėČŲ╩ūĪŻ
ė╔łD5-8┐╔ęį┐┤│÷Ęž╩■Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌äė┴”Ę┬šµĄ─▀^│╠ųąŻ¼ę╗Č╦Ą─╚²éĆąĪŚUį┌ęŲäėĖ▒ųą╩▄ĄĮ┴”ų▓Įį÷╝ėĖ³║ÕŻ¼«öŽĄĮy(t©»ng)ķ_╩╝▐Däė║¾ė¾│▌Ż¼╦³éā╩▄ĄĮĄ─┴”│╩¼F(xi©żn)ėąęÄ(gu©®)┬╔Ą─▓©äėŻ¼Ą½╗źŽÓų«ķgėąę╗éĆŽÓ╬╗▓Ņė├ńĶĪŻš²╩Ūė╔ė┌╦³éāĄ─╩▄┴”ūāäėÅ═ļs│ė┬„Ż¼╣╩╦³éāį┌╗¼ŚU╠ū▌S╔ŽĄ─╚²éĆĘ┤┴”Ą─Ž“┴┐║═Š═┐╔─▄▓╗×ķ0Ż¼▀@śėĄ─ĮY╣¹╩Ū┴ŲŽčŻ¼╦³éā│²┤╦ų«═Ōį┌╗¼ŚU╠ū▌SŻ©▌ö╚ļ▌SŻ®╔Žą╬│╔žō▌d┼żŠž═ŌŪų═ĖŻ¼▀ĆĢ■«a(ch©Żn)╔·ĖĮ╝ėÅØŠžĄ─ū„ė├ĪŻ
ė╔łD5-9┐╔ęį┐┤│÷└Ē╚¶Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌äė┴”Ę┬šµĄ─▀^│╠ųą│čĮ┼Ż¼ ļp┬ō(li©ón)╚²▓µŚUę╗Č╦Ą─╚²▌SŅi═¼ā╚(n©©i)Ū“Ņ^Ą─łAų∙Ė▒╔ŽĄ─ū„ė├┴”ūā╗»┌ģä▌═¼łD5-8ųąĄ─ąĪŚUūā╗»┌ģä▌╩ŪŽÓ═¼Ą─ĪŻė╔ė┌╦³éāĄ─╩▄┴”ūāäėÅ═ļs╬ą╦ŲŻ¼╣╩▀@╚²┴”į┌ļp┬ō(li©ón)╚²▓µŚUę╗Č╦╔ŽĄ─Ž“┴┐║═ę▓┐╔─▄▓╗×ķ0░į┤█ĪŻ▀@śėį┌ļp┬ō(li©ón)╚²▓µŚU╔Žę▓Ģ■«a(ch©Żn)╔·ĖĮ╝ėÅØŠžĄ─ū„ė├ĪŻČ°Ūę▌SŅi╩▄┴”ŲĮŠ∙▌^ąĪŚUĄ─╩▄┴”ę¬┤¾į╣┼ŁĪŻ
ė╔łD5-10┐╔ęį┐┤│÷┤Ą║┴Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌äė┴”Ę┬šµĄ─▀^│╠ųąŻ¼Ųõę╗Č╦Ą─╚²ąĪŚU═¼╗¼ŚU╠ū▌SķgĄ──”▓┴┴”ūā╗»ŽÓ«öėąęÄ(gu©®)┬╔┴±┴ĪĪŻ«öąĪŚUŽÓī”╗¼ŚU╠ū▌S▀\äėĘ┤Ž“Ģrėµ┴“Ż¼╦³éāŠ═Ģ■į┌š²žōķgėąęÄ(gu©®)┬╔Ą─ŪąōQųÕ╠│ĪŻ
ė╔łD5-11┐╔ęį┐┤│÷Ż¼ļp╚Ī╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌äė┴”Ę┬šµĄ─▀^│╠ųąČ╣Š▐Ż¼Ųõę╗Č╦Ą─╚²ā╚(n©©i)Ū“Ņ^═¼▌SŅiķgĄ──”▓┴┴”ūā╗»ŽÓ«öėąęÄ(gu©®)┬╔╩Ż▒┘ĪŻ«öā╚(n©©i)Ū“Ņ^ŽÓī”▌SŅi▀\äėĘ┤Ž“ĢrŻ¼ŠCéāŠ═Ģ■į┌š²žōķgėąęÄ(gu©®)┬╔Ą─ŪąōQ═∙╚ėĪŻĄ½į┌▀@└’«a(ch©Żn)╔·─”▓┴┴”Ą─ŲĮŠ∙┤¾ąĪę¬▌^ąĪŚU╔ŽĄ─ąĪĄ├ČÓĘĘ┴įĪŻ
ė╔łD5-12┐╔ęį┐┤│÷Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌äė┴”Ę┬šµĄ─▀^│╠ųąŲ╝╠┼Ż¼Ųõę╗Č╦Ą─╚²éĆąĪŚU╦∙╩▄Ą──”▓┴┴”Ą─║Ž┴”ūāäė▌^ėąęÄ(gu©®)┬╔┐įĘ■Ż¼ŲõųĄį┌ķ_╩╝ę╗Č╬ŲĮ╗¼Ż¼Ųõ║¾Äū║§ęį0×ķųąą─▓©äė╗╚┬▐ĪŻė╔ė┌▀@╚²éĆ─”▓┴┴”Ą─ĘĮŽ“Š∙ŲĮąąė┌▌ö╚ļ▌S╗“▌ö│÷▌S▌SŠĆ═¦ūžŻ¼╣╩┤╦║Ž┴”Ģ■į┌▌ö╚ļ▌S║═▌S│÷▌S╔Ž«a(ch©Żn)╔·▌SŽ“Ą─┴”Ż¼į┌▌ö╚ļ▌S║═▌ö│÷▌S╔Ž«a(ch©Żn)╔·─”▓┴┼żŠž┤«╦▄ĪŻ╚ń╚ĪŲõ╦«ŲĮ▌^Ė▀ųĄ60┼ŻüĒėŗ╦Ńšė┴Ż¼╦³«a(ch©Żn)╔·Ą──”▓┴┼żŠž×ķ270NĪżmmŻ©60Ī┴0.3Ī┴15=270Ż¼Ųõųą0.3×ķäė─”▓┴ŽĄöĄ(sh©┤)ū«Ę╦Ż¼15×ķ─”▓┴░ļÅĮŻ®┴├ČŻ¼┤╦ųĄŽÓī”łD5-13ųąĄ─ųĄČ°ĘĮŽÓ«öąĪĪŻ
ė╔łD5-13┐╔ęį┐┤│÷ę▒╬ĻŻ¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌äė┴”Ę┬šµĄ─▀^│╠ųąĖ³▒ŪŻ¼▌ö╚ļ▌S║═▌ö│÷▌S╔ŽĄ──”▓┴┼żŠžųØuį÷╝ėŻ¼╚╗║¾ķ_╩╝ę╗ĘNÅ═ļsĄ─▓©äė├Ū╠čĪŻė╔ė┌▒Š┤╬Ę┬šµ╩Ūį┌¤oųž┴”Ą─Łh(hu©ón)Š│Ž┬▀MąąĄ─┤ļų²Ż¼ę“┤╦Ż¼▓╗Ģ■ę“×ķųž┴”Ą─ū„ė├į┌▌ö╚ļ▌S║═▌ö│÷▌S╔Ž«a(ch©Żn)╔·ÅØŠž║═ė╔Ųõ«a(ch©Żn)╔·Ą─Ę┤ū„ė├┴”Č°ą╬│╔ÅØŠžĮ╣│█Ż¼«ö╚╗ę▓Š═ø]ėą╦³Ą─ū„ė├Č°ą╬│╔Ą──”▓┴┼żŠžĘŽ║¼Ż¼ätų╗ėą┐╔─▄╩Ū╚²ąĪŚU═¼╗¼ŚU╠ū▌SķgĄ─ū„ė├┴”Č°ī¦ų┬į┌╗¼ŚU╠ū▌S╔Ž«a(ch©Żn)╔·Ą─▌SŽ“┴”║═ÅØŠžČ°«a(ch©Żn)╔·┤╦─”▓┴┼żŠžŻ¼Ą½ė╔łD5-12Ą─Ęų╬÷┐╔ų¬╠║┐§Ż¼▌SŽ“┴”«a(ch©Żn)╔·Ą──”▓┴┼żŠž║▄ąĪ, ät┐╔ęįūC├„╗¼ŚU╠ū╔Žėą▌^┤¾Ą─ĖĮ╝ėÅØŠž┤µį┌Ż¼Č°Ūę╦³╩Ūą╬│╔─”▓┴┼żŠžĄ─ų„ę¬įŁę“Šį╗┘ĪŻ
5.5▒Šš┬ąĪĮY
▒Šš┬ųąĻU╩÷┴╦ÖCąĄäė┴”īWĄ─ÄūĘNĘų╬÷ĘĮĘ©čĪčóŻ¼├„┤_┴╦äė┴”Ęų╬÷ĘĮĘ©Ą─┌ģä▌ĪŻ▓óį┌ČÓäé¾wäė┴”īWĄ─└Ēšō╗∙ĄA╔Ž└╚Ž»Ż¼└¹ė├─┐Ū░ūŅ×ķ┴„ąąĄ─ČÓ¾wäė┴”īW▄ø╝■ADAMS,ī”ļp┬ō(li©ón)╚²▓µŚU╚fŽ“┬ō(li©ón)▌SŲ„▀Mąą┴╦äė┴”īW─Żą═Ą─Į©┴ó║═äė┴”Ę┬šµĮ▄╣¶Ż¼Ą├ĄĮ┴╦įSČÓ┐╔ęĢ╗»Ą─ĮY╣¹ĪŻūC├„▀@ĘN┬ō(li©ón)▌SŲ„į┌é„äėųąŲõ╩▄┴”ŽÓ«ö?sh©┤)─Å═ļs═§┬╦Ż¼▓óĄ├│÷┴╦ę╗ą®Č©ąįĄ─ĮYšō║ž╔®Ż¼▀@ĘN┬ō(li©ón)▌SŲ„Ą─▀Mę╗▓Į蹊┐ķ_░l(f©Ī)┤“Ž┬┴╦╗∙ĄAĪŻ