╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─▀\(y©┤n)äė(d©░ng)Ę┬šµ
4.1ę²čį
ėŗ(j©¼)╦ŃÖC(j©®)╝╝ąg(sh©┤)Ą─░l(f©Ī)š╣×ķĘ┬šµ╝╝ąg(sh©┤)╠ß╣®┴╦ÅŖ(qi©óng)ėą┴”Ą─╩ųČ╬║═╣żŠ▀ĪŻė╔ė┌┐╔ęįį┌ėŗ(j©¼)╦ŃÖC(j©®)╔ŽĮ©┴óÖC(j©®)ąĄŽĄĮy(t©»ng)Ą─▀\(y©┤n)äė(d©░ng)īW(xu©”)Īóäė(d©░ng)┴”īW(xu©”)─Żą═▓ó─▄čĖ╦┘┤¦ĮÓĪóņ`╗ŅĄž▀M(j©¼n)ąą╠ōöMįć“×(y©żn)╩─└ķŻ¼Ą├│÷ÖC(j©®)ąĄŽĄĮy(t©»ng)Ą─Ė„ĒŚ(xi©żng)ąį─▄ģóöĄ(sh©┤)╬═└§Ż¼×ķįO(sh©©)ėŗ(j©¼)▓┐ķTį┌ĮĄĄ═ÖC(j©®)ąĄŽĄĮy(t©»ng)Ą─čąųŲ│╔▒Š┴╚Ų■Ż¼┐sČ╠čąųŲų▄Ų┌ūŅĖ┌Ż¼╠ßĖ▀įć“×(y©żn)Ą─░▓╚½ąįĘĮ├µŲĄĮ┴╦ųžę¬Ą─ū„ė├╗ū┴∙ĪŻ─┐Ū░ėŗ(j©¼)╦ŃÖC(j©®)Ę┬šµĘų╬÷į┌«a(ch©Żn)ŲĘįO(sh©©)ėŗ(j©¼)čąųŲųąš╝ėąįĮüĒįĮųžę¬Ą─Ąž╬╗ŠŻė└ĪŻ
▒Šš┬ųąę²╚ļėŗ(j©¼)╦ŃÖC(j©®)Ę┬šµ╝╝ąg(sh©┤)Ż¼└¹ė├─┐Ū░╩└Įń╔ŽūŅŠ▀ÖÓ(qu©ón)═■Ą─ÖC(j©®)ąĄŽĄĮy(t©»ng)╠ōöMśėÖC(j©®)Ę┬šµ▄ø╝■ADAMSī”(du©¼)╩«ūų▌S╩Į╚fŽ“┬ō(li©ón)▌SŲ„╣·š┬Īóå╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„║═ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„▀M(j©¼n)ąą┴╦▀\(y©┤n)äė(d©░ng)īW(xu©”)Ę┬šµŠ▀į┐Ż¼Ą├ĄĮ┴╦įSČÓ┐╔ęĢ╗»Ą─öĄ(sh©┤)ō■(j©┤)ĮY(ji©”)╣¹╠ŽęįĪŻ“×(y©żn)ūC┴╦└¹ė├AOAMS▀M(j©¼n)ąąÖC(j©®)ąĄČÓ¾wŽĄĮy(t©»ng)Ę┬šµĄ─ėąą¦ąį║═š²┤_ąįŻ¼═¼Ģr(sh©¬)Ą├ĄĮ┴╦╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„ęįŪ░╬┤▒╗░l(f©Ī)¼F(xi©żn)Ą─▀\(y©┤n)äė(d©░ng)ęÄ(gu©®)┬╔├źŲ┤Ż¼×ķ▀@ĘN┬ō(li©ón)▌SŲ„Ą─▀M(j©¼n)ę╗▓Įķ_░l(f©Ī)└¹ė├╠ß╣®┴╦╗∙ĄA(ch©│)─Ń╗ŁĪŻ
4.2└Ēšō▒│Š░
4.2.1╠ōöMśėÖC(j©®)╝╝ąg(sh©┤)
╠ōöMśėÖC(j©®)╝╝ąg(sh©┤)Ż©Virtual Prototype Technology║å(ji©Żn)ĘQVPTŻ®╩Ū«ö(d©Īng)Ū░įO(sh©©)ėŗ(j©¼)ųŲįņŅI(l©½ng)ė“Ą─ę╗ķTą┬╝╝ąg(sh©┤)ĪŻ╦³╩Ū╗∙ė┌╠ōöMśėÖC(j©®)Ą─Ž╚▀M(j©¼n)Ą─öĄ(sh©┤)ūų╗»įO(sh©©)ėŗ(j©¼)ĘĮĘ©╠ęč·ĪŻ╦³▓╗╩Ūę╗ĒŚ(xi©żng)Š▀¾wĄ─╝╝ąg(sh©┤)╗ĄĘ╦Ż¼Č°╩Ū╔µ╝░ČÓ¾wŽĄĮy(t©»ng)äė(d©░ng)┴”īW(xu©”)Īóėŗ(j©¼)╦ŃĘĮĘ©Ū╦═│Īó▄ø╝■╣ż│╠Ą╚īW(xu©”)┐Ų╩╩ūęŻ¼īó▀@ą®ŽÓĻP(gu©Īn)╝╝ąg(sh©┤)▀\(y©┤n)ė├ŽĄĮy(t©»ng)╣ż│╠║═ą┼Žó╝»│╔╝╝ąg(sh©┤)ĮY(ji©”)║Ž│╔ę╗éĆ(g©©)ėąÖC(j©®)Ą─š¹¾wĪŻ╦³└¹ė├▄ø╝■Į©┴óÖC(j©®)ąĄŽĄĮy(t©»ng)Ą─╚²ŠSīŹ(sh©¬)¾w─Żą═║═┴”īW(xu©”)─Żą═┴ĄūĘŻ¼Ęų╬÷║═įu(p©¬ng)╣└ŽĄĮy(t©»ng)Ą─ąį─▄Ę¼╣¦Ż¼Å─Č°×ķ╬’└ĒśėÖC(j©®)Ą─įO(sh©©)ėŗ(j©¼)║═ųŲįņ╠ß╣®ģóöĄ(sh©┤)ę└ō■(j©┤)ĪŻ
╠ōöMśėÖC(j©®)╝╝ąg(sh©┤)é╚(c©©)Ą─╗∙▒ŠĖ┼─Ņ╩ŪųĖį┌«a(ch©Żn)ŲĘįO(sh©©)ėŗ(j©¼)ķ_░l(f©Ī)▀^│╠ųą╦Ī╦’Ż¼īóĘų╔óĄ─┴Ń▓┐╝■įO(sh©©)ėŗ(j©¼)║═Ęų╬÷╝╝ąg(sh©┤)Ż©ųĖį┌─│å╬ę╗ŽĄĮy(t©»ng)ųą┴Ń▓┐╝■Ą─CAD║═FEA╝╝ąg(sh©┤)Ż®╚Ó║Žį┌ę╗Ųū╣š®Ż¼į┌ėŗ(j©¼)╦ŃÖC(j©®)╔ŽĮ©įņ│÷«a(ch©Żn)ŲĘĄ─š¹¾w─Żą═Ż¼▓óßśī”(du©¼)įō«a(ch©Żn)ŲĘį┌═Č╚ļ╩╣ė├║¾Ą─Ė„ĘN╣żør▀M(j©¼n)ąąĘ┬šµĘų╬÷┴▒ń═Ż¼ŅA(y©┤)£y(c©©)«a(ch©Żn)ŲĘĄ─š¹¾wąį─▄│Č┬╚Ż¼▀M(j©¼n)Č°Ė─▀M(j©¼n)«a(ch©Żn)ŲĘįO(sh©©)ėŗ(j©¼)Īó╠ßĖ▀«a(ch©Żn)ŲĘąį─▄Ą─ę╗ĘNą┬╝╝ąg(sh©┤)▒’ą╝ĪŻ╠ōöMśėÖC(j©®)╝╝ąg(sh©┤)į┌«a(ch©Żn)ŲĘįO(sh©©)ėŗ(j©¼)ļAČ╬č╠─┌Ż¼ę╗Š═┐╔ęįī”(du©¼)š¹éĆ(g©©)ŽĄĮy(t©»ng)▀M(j©¼n)ąą═Ļš¹Ą─Ęų╬÷Ż¼┐╔ęįė^▓ņ▓óįć“×(y©żn)Ė„ĮM│╔▓┐╝■Ą─ŽÓ╗ź▀\(y©┤n)äė(d©░ng)ŪķørŲ¹║¾ĪŻ╩╣ė├ŽĄĮy(t©»ng)Ę┬šµ▄ø╝■į┌Ė„ĘN╠ōöMŁh(hu©ón)Š│ųąšµīŹ(sh©¬)Ąž─ŻöMŽĄĮy(t©»ng)Ą─▀\(y©┤n)äė(d©░ng)├µą²Ż¼╦³┐╔ęįį┌ėŗ(j©¼)╦ŃÖC(j©®)╔ŽĘĮ▒ŃĄžą▐Ė─įO(sh©©)ėŗ(j©¼)╚▒Ž▌Ż¼Ę┬šµįć“×(y©żn)▓╗═¼Ą─įO(sh©©)ėŗ(j©¼)ĘĮ░Ė┴Į╬ĖŻ¼ī”(du©¼)š¹éĆ(g©©)ŽĄĮy(t©»ng)▀M(j©¼n)ąą▓╗öÓĖ─▀M(j©¼n)ę„Š┌Ż¼ų▒ų┴½@Ą├ūŅā×(y©Łu)įO(sh©©)ėŗ(j©¼)ĘĮ░Ė║¾Ż¼į┘ųŲįņ│÷śėÖC(j©®)ųļ├╔ĪŻ
×ķ┴╦╝ė┐ņ«a(ch©Żn)ŲĘĄ─Ė³ą┬▓┌╣┐Ż¼╠ßĖ▀╩ął÷(ch©Żng)Ą─Ėé(j©¼ng)ĀÄ(zh©źng)┴”▓││ŅŻ¼īó═Č┘Y’L(f©źng)ļU(xi©Żn)ĮĄĄĮūŅĄ═ŪŻ╦ŅŻ¼╠ōöMįO(sh©©)ėŗ(j©¼)į┌¼F(xi©żn)┤·╣ż│╠ųąĄ─Ąž╬╗īóĢ■(hu©¼)įĮüĒįĮųžę¬ĪŻ
4.2.2ČÓ¾wäė(d©░ng)┴”īW(xu©”)║å(ji©Żn)Įķ
ČÓéĆ(g©©)╬’¾w═©▀^▀\(y©┤n)äė(d©░ng)Ė▒▀BĮėį┌ę╗ŲĮM│╔Ą─ŽĄĮy(t©»ng)ĘQ×ķČÓ¾wŽĄĮy(t©»ng)ČČĖ±ĪŻČÓ¾wäė(d©░ng)┴”īW(xu©”)╩Ū蹊┐ČÓ¾wŽĄĮy(t©»ng)ųą▌d║╔║═ŽĄĮy(t©»ng)▀\(y©┤n)äė(d©░ng)Ą─ĻP(gu©Īn)ŽĄ┼ĄŲ╗ĪŻ░³║¼ā╔▓┐ĘųŻ¼╝┤ČÓäé¾wŽĄĮy(t©»ng)äė(d©░ng)┴”īW(xu©”)║═╚ßąįČÓ¾wŽĄĮy(t©»ng)äė(d©░ng)┴”īW(xu©”)▒óų¶ĪŻ
ČÓäé¾wŽĄĮy(t©»ng)äė(d©░ng)┴”īW(xu©”)Ą─ĮŌ╦ŃĘĮĘ©ėą└ŁĖ±└╩╚š─Żą═╝░╦ŃĘ©╩š▒╝ĪóĄč┐©Ā¢─Żą═╝░╦ŃĘ©šŲ╬žĪóäPČ„ĘĮĘ©Ą╚Ą╚ĪŻŻ©ADAMSųą▓╔ė├┴╦╩└Įń╔ŽÅVĘ║┴„ąąĄ─ČÓäé¾wŽĄĮy(t©»ng)äė(d©░ng)┴”īW(xu©”)└ĒšōųąĄ─└ŁĖ±└╩╚š─Żą═╝░╦ŃĘ©Ų║║ÕĪŻŻ®
4.2.3ADAMS║å(ji©Żn)Įķ
4.2.3.1ADAMSĄ─╣”ė├║═ĮM│╔
4.2.3.1.IADAMSĄ─╣”ė├
└ĒŽļĄ─Ę┬šµæ¬(y©®ng)─▄ØMūŃęįŽ┬Äū³c(di©Żn)ę¬Ū¾Ż║Į©─Ż║å(ji©Żn)å╬┐ņ╦┘ų╩ĮČĪó─Żą═▒ŲšµĪóŠ▀ėą╚²ŠSäė(d©░ng)«ŗ║═▒Ńė┌š{(di©żo)š¹Ę┬šµģóöĄ(sh©┤)¶µ╝ĪĪŻ┴Ē═Ō─Ż░ĄŻ¼▀\(y©┤n)äė(d©░ng)īW(xu©”)┼cäė(d©░ng)┴”īW(xu©”)Ą─ėŗ(j©¼)╦Ńę▓╩Ū╩«Ęųųžę¬Ą─╣żū„Ż¼░³└©š²ĮŌ║═─µĮŌĄ─ėŗ(j©¼)╦Ń─Ņ╝└Ż¼│ŻęÄ(gu©®)Ą─╦ŃĘ©┤¾ČÓ▓╔ė├┼ŻŅDĪ¬Ī¬?d©▓)W└ŁĘĮ│╠╗“└ŁĖ±└╩╚šĘĮ│╠╣┴Ų▒Ż¼▓╗āH╣żū„┴┐┤¾Ż¼Č°ŪęĘŪ│Ż╚▌ęū│÷Õe(cu©░)╚╣ŽĄĪŻ╬ęéāę▓ŽŻ═¹į┌įO(sh©©)ėŗ(j©¼)▀^│╠ųą─▄▒MįńĄž░l(f©Ī)¼F(xi©żn)ę╗ą®å¢Ņ}▒’┐╝Ż¼╝░Ģr(sh©¬)ā×(y©Łu)╗»Ż¼ė╔ė┌╬┤ų¬┴┐╠½ČÓč█▓▓Ż¼╣żū„┴┐ę▓║▄┤¾ą„Ę«Ż¼▀@ę╗▓ĮĄ─╣żū„═©│Ż╩Ūį┌śėÖC(j©®)═Ļ│╔ų«║¾▀M(j©¼n)ąąŻ¼Å─Č°įņ│╔ą¦┬╩▌^Ą═║═▓╗▒žę¬Ą─└╦┘M(f©©i)ė▀║ĶĪŻ
╬ęéāĖ³ŽŻ═¹╔Ž╩÷ÄūĒŚ(xi©żng)╣żū„─▄ėąÖC(j©®)Ąž┬ō(li©ón)ŽĄį┌ę╗ŲŻ«▒╚╚ńšfūė╠žŻ¼Ė─äė(d©░ng)┴╦─Żą═║¾┐╔ęįų▒Įėį┌Ę┬šµųą░čĖ─äė(d©░ng)¾w¼F(xi©żn)│÷üĒŻ╗š{(di©żo)š¹┴╦─│įO(sh©©)ėŗ(j©¼)ģóöĄ(sh©┤)╗“─│ĻP(gu©Īn)╣Ø(ji©”)Ą─▀\(y©┤n)äė(d©░ng)ęÄ(gu©®)┬╔║¾¤oąĶĖ─äė(d©░ng)│╠ą“Š═┐╔ęįų▒Įė▀M(j©¼n)ąą▀\(y©┤n)äė(d©░ng)īW(xu©”)┼cäė(d©░ng)┴”īW(xu©”)Ą─ųžą┬ėŗ(j©¼)╦ŃĄ╚Ą╚╠Ķ±├Ż¼Ą½ė╔ė┌═©│ŻĄ─╣żū„ĘĮ╩Į╩Ū▓╔ė├▓╗═¼Ą─▄ø╝■Ęųäe╠Ä└Ē╔Ž╩÷ÄūĒŚ(xi©żng)╣żū„░ż▓«Ż¼«ö(d©Īng)ģóöĄ(sh©┤)ėąūāäė(d©░ng)Ģr(sh©¬)Ż¼╔Ž╩÷ÄūĒŚ(xi©żng)╣żū„Š∙ąĶū÷ŽÓæ¬(y©®ng)Ą─Ė─äė(d©░ng)ąŁ│¼Ż¼╣żū„┴┐║▄┤¾┬─ę’Ż¼ĘŪ│Ż▓╗ņ`╗ŅĪŻ▀Ćęūė┌│÷Õe(cu©░)Ą±╩▓ĪŻ└¹ė├ADAMS▄ø╝■─▄īó▀@ÄūĒŚ(xi©żng)╣żū„ėąÖC(j©®)ĄžĮY(ji©”)║Žį┌ę╗Ų▓°░│Ż¼▓óŪęĘŪ│Ż║å(ji©Żn)▒ŃŽÓų▒ė^Ż¼┐╔ęį┤¾┤¾╠ßĖ▀╣żū„Ą─ą¦┬╩┤¹░ČĪŻ
ÖC(j©®)ąĄŽĄĮy(t©»ng)ūįäė(d©░ng)äė(d©░ng)┴”īW(xu©”)Ęų╬÷▄ø╝■ADAMS(Automatic Dynamic Analysis of Mechanical SystemŻ®╩Ūė╔├└ć°MDI╣½╦Šķ_░l(f©Ī)Ą─ę╝╩┐Īó─┐Ū░╩└Įń╔ŽūŅŠ▀ÖÓ(qu©ón)═■Ą─ÖC(j©®)ąĄŽĄĮy(t©»ng)╠ōöMśėÖC(j©®)Ę┬šµ▄ø╝■Ż¼╣”─▄ÅŖ(qi©óng)┤¾│źŠ»Ż¼╦³×ķė├æ¶╠ß╣®┴╦ÅŖ(qi©óng)┤¾Ą─Į©─Ż§’Š╚ĪóĘ┬šµŁh(hu©ón)Š│Ż¼╩╣ė├æ¶─▄ē“?q©▒)”Ė„ĘNÖC(j©®)ąĄŽĄĮy(t©»ng)▀M(j©¼n)ąąĮ©─Ż├°š¶ĪóĘ┬šµ║═Ęų╬÷║ą╩╣ĪŻ║═Ųõ╦³CADĪóCAE▄ø╝■ŽÓ▒╚Ų▀ŽėŻ¼ADAMSŠ▀ėą╩«ĘųÅŖ(qi©óng)┤¾Ą─▀\(y©┤n)äė(d©░ng)īW(xu©”)║═äė(d©░ng)┴”īW(xu©”)Ęų╬÷╣”─▄╔┘░ņĪŻ─┐Ū░ęčÅVĘ║Ąžæ¬(y©®ng)ė├ė┌Ų¹▄ćųŲįņ░·┬²Īó║Į┐š║Į╠ņĪóĶFĄ└Į╗═©Ą╚ŅI(l©½ng)ė“ėó╝╦ĪŻ└¹ė├ADAMS▄ø╝■┐╔ęį┐ņ╦┘═ņĘ┼ĪóĘĮ▒ŃĄžäō(chu©żng)Į©═Ļ╚½ģóöĄ(sh©┤)╗»Ą─ÖC(j©®)ąĄŽĄĮy(t©»ng)Äū║╬─Żą═ĪŻįō─Żą═╝╚┐╔ęįį┌ADAMS▄ø╝■└’ų▒ĮėĮ©įņ│╩└ķŻ¼ę▓┐╔ęįÅ─Ųõ╦³Ą─CAD▄ø╝■Ż©╚ńPrŻ»EUGĄ╚Ż®ųąé„╚ļįņą═▒ŲšµĄ──Żą═┐▀ŠõŻ¼╚╗║¾į┘į┌─Żą═╔Ž╠Ē╝ė╝s╩°Īó▌d║╔║═▀\(y©┤n)äė(d©░ng)╝żäŅ(l©¼)ė┼╦ąŻ¼ūŅ║¾ł╠(zh©¬)ąą┼cīŹ(sh©¬)ļH╣żørĘŪ│ŻĮėĮ³Ą─▀\(y©┤n)äė(d©░ng)Ę┬šµ£y(c©©)įćę„┐ĻŻ¼╦∙Ą├Ą─£y(c©©)įćĮY(ji©”)╣¹Š═╩ŪÖC(j©®)ąĄŽĄĮy(t©»ng)╣żū„▀^│╠Ą──ŻöM▀\(y©┤n)äė(d©░ng)ŪķørĪŻ
4.2.3.1.2ADAMSĄ─ĮM│╔łA
ADAMS▄ø╝■░³└©3éĆ(g©©)╗∙▒Š─ŻēKŻ║ė├æ¶Įń├µ─ŻēKŻ©ADAMS/ViewŻ®ę®└½ĪóĘĮ│╠Ū¾ĮŌŲ„(ADAMS/SolverŻ®│Õ╩╗ĪóĘ┬šµĮY(ji©”)╣¹║¾╠Ä└Ē─ŻēKŻ©ADAMS/PostprocessorŻ®ĪŻ
ADAMS/V1ew╠ß╣®┴╦ę╗éĆ(g©©)ų▒Įė├µŽ“ė├æ¶Ą─╗∙▒Š▓┘ū„ī”(du©¼)įÆŁh(hu©ón)Š│║═śėÖC(j©®)Ęų╬÷Ū░╠Ä└Ē╣”─▄ęļĮ╠Ż¼░³└©śėÖC(j©®)Ą─Į©─Żš╚╔©ĪóöĄ(sh©┤)ō■(j©┤)▌ö╚ļ┼cŠÄ▌ŗĪó┼cŪ¾ĮŌŲ„║═║¾╠Ä└ĒĄ╚│╠ą“Ą─ūįäė(d©░ng)ŃĢĮėĄ╚═Ž┐½ĪŻ
ADAMS/Solver╩Ū▄ø╝■Ą─║╦ą─▓┐Ęų╝Õ┤ŁŻ¼╩ŪŪ¾ĮŌÖC(j©®)ąĄŽĄĮy(t©»ng)▀\(y©┤n)äė(d©░ng)║═äė(d©░ng)┴”īW(xu©”)å¢Ņ}Ą─│╠ą“Ż¼į┌ViewĄ─š{(di©żo)ė├Ž┬═Ļ│╔─Żą═Ą─ņo┴”īW(xu©”)└÷╩ŠĪó▀\(y©┤n)äė(d©░ng)īW(xu©”)╬└┬■Īóäė(d©░ng)┴”īW(xu©”)Ą─ėŗ(j©¼)╦ŃŻ¼▓óīóėŗ(j©¼)╦ŃĘų╬÷ĮY(ji©”)╣¹ūįäė(d©░ng)ĘĄ╗žĄĮADAMS/View╔÷╔░ĪŻ
ADAMS/PostprooessorŠ▀ėą║▄ÅŖ(qi©óng)Ą─║¾╠Ä└Ē╣”─▄┴ą╩ĻŻ¼┐╔ęį╗žĘ┼Ę┬šµĮY(ji©”)╣¹Ż¼└LųŲĖ„ĘNĘų╬÷Ū·ŠĆĖõ╚ĘŻ¼▓óŪę┐╔ęįī”(du©¼)ĮY(ji©”)╣¹ū„öĄ(sh©┤)īW(xu©”)║═Įy(t©»ng)ėŗ(j©¼)Ą─ėŗ(j©¼)╦Ń░³┴▀ĪŻ
│²╗∙▒Š─ŻēK═ŌŻ¼ADAMS▀Ć░³║¼╣”─▄öU(ku©░)š╣─ŻēKį┤║∙ĪóĮė┐┌─ŻēK╩½įĮĪóīŻśI(y©©)─ŻēKĪóęį╝░╣żŠ▀Žõ─ŻēKŽó╠├ĪŻŲõųąį┌╣”─▄öU(ku©░)š╣─ŻēKųąėąADAMS/VibrationŻ©š±äė(d©░ng)Ęų╬÷─ŻēKŻ®╚┬─³ĪóDAMS/LinearŻ©ŽĄĮy(t©»ng)─ŻæB(t©żi)Ęų╬÷─ŻēKŻ®Ą╚ĪŻį┌Įė┐┌─ŻēKųąėąADAMS/FlexŻ©╚ßąįĘų╬÷─ŻēKŻ®Ą╚┤óŠžĪŻADAMS/Flex─ŻēK╠ß╣®┴╦ADAMS┼cėąŽ▐į¬▄ø╝■ANSYSĖą░ęĪóNASTRAN╣ėš¦ĪóABAQS│ų╦ĒĪóI-DEASų«ķgĄ─ļpŽ“öĄ(sh©┤)ō■(j©┤)Įė┐┌╝┤┼ĪŻ└¹ė├┤╦─ŻēK┐╔ęį┐╝æ]╬’¾wĄ─ÅŚąįŻ¼į┌─Żą═ųąę²╚ļ╚ßąį¾w═¾įĪŻ¼Å─Č°╠ßĖ▀Ę┬šµĄ─Š½Č╚╩źŪ┤ĪŻ
4.2.3.2ė├ADAMSĮ©─ŻĪóĘ┬šµĄ─▓Į¾E
Ųõ▓Į¾E║å(ji©Żn)╩÷╚ńŽ┬Ż║
Į©įņ─Żą═
Į©─Ż░³║¼╚²▓┐Ęų╣żū„Ż║
a.äō(chu©żng)Į©┴Ń╝■Ż║ADAMSĮ©─ŻĘų╬÷Ą─╗∙▒Š▓Į¾Eėąā╔ĘN═ŠÅĮŻ║═©▀^ADAMS/ViewĄ─┴Ń╝■ÄņüĒäō(chu©żng)Į©Ė„ĘN║å(ji©Żn)å╬Ą─▀\(y©┤n)äė(d©░ng)å╬į¬Ż©┴Ń╝■Ż®į─┴∙Ż╗ė├ADAMS/Exchangeę²╚ļÅ═(f©┤)ļsĄ─CADą╬¾wŻ©Ģ■(hu©¼)ė░Ēæ▀\(y©┤n)ąą╦┘Č╚Ż®:
b.Įo─Żą═╩®╝ė╝s╩°║═▀\(y©┤n)äė(d©░ng)─ĖĖŽŻ╗
c.Įo─Żą═╩®╝ėĖ„ĘNū„ė├┴”ĪŻ
£y(c©©)įć─Żą═
Č©┴x£y(c©©)┴┐▓óī”(du©¼)─Żą═▀M(j©¼n)ąą│§▓ĮĘ┬šµ├󥟯¼═©▀^Ę┬šµĮY(ji©”)╣¹Öz“×(y©żn)?z©Īi)Żą═ųąĖ„éĆ(g©©)┴Ń╝■═“╔╝Īó╝s╩°║═┴”╩Ūʱš²┤_ĪŻ
ąŻ“×(y©żn)?z©Īi)Żą?SPAN lang=EN-US>
ī¦(d©Żo)╚ļīŹ(sh©¬)ļHīŹ(sh©¬)“×(y©żn)£y(c©©)įćöĄ(sh©┤)ō■(j©┤)┐╣╠╔Ż¼┼c╠ōöMĘ┬šµĄ─ĮY(ji©”)╣¹▀M(j©¼n)ąą▒╚▌^╝ķę▒ĪŻ
─Żą═Ą─╝Ü(x©¼)╗»
Įø(j©®ng)▀^│§▓ĮĘ┬šµ┤_Č©┴╦─Żą═Ą─╗∙▒Š▀\(y©┤n)äė(d©░ng)║¾Ż¼┐╔ęįį┌─Żą═ųą╝ė╚ļĖ³Å═(f©┤)ļsĄ─å╬į¬ų¹┬©Ż¼╚ńį┌▀\(y©┤n)äė(d©░ng)Ė▒╔Ž╝ė╚ļ─”▓┴┬¼└·Ż¼ė├ŠĆąįĘĮ│╠╗“ę╗░ŃĘĮ│╠Č©┴x┐žųŲŽĄĮy(t©»ng)Ż¼╝ė╚ļ╚ßąį▀BĮė╝■Ą╚Ą╚═ĶŠ¶Ż¼╩╣─Żą═┼cšµīŹ(sh©¬)ŽĄĮy(t©»ng)Ė³╝ėĮ³╦Ųčč│ėĪŻ
─Żą═Ą─ųžą┬├Ķ╩÷
×ķĘĮ▒ŃįO(sh©©)ėŗ(j©¼)Ż¼┐╔ęį╝ė╚ļĖ„ĘNģóöĄ(sh©┤)ī”(du©¼)─Żą═▀M(j©¼n)ąą├Ķ╩÷čŪš½Ż¼«ö(d©Īng)ė├æ¶ī”(du©¼)─Żą═▀M(j©¼n)ąą┴╦Ė³Ė─ū„├─Ż¼▀@ą®ģóöĄ(sh©┤)ūįäė(d©░ng)░l(f©Ī)╔·ūā╗»Ż¼╩╣ŽÓĻP(gu©Īn)Ė─äė(d©░ng)ūįäė(d©░ng)ł╠(zh©¬)ąą╦¦┐»ĪŻ
ā×(y©Łu)╗»─Żą═
ī”(du©¼)─Żą═▀M(j©¼n)ąąģóöĄ(sh©┤)Ęų╬÷ĄÓ┐źŻ¼ā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)ĪŻ
Č©ųŲė├æ¶ūį╝║Ą─Łh(hu©ón)Š│
ė├æ¶┐╔ęįČ©ųŲ▓╦å╬║±ų└Īóī”(du©¼)įÆ┐“Ą▄ūŲŻ¼╗“└¹ė├║Ļ╩╣įSČÓųžÅ═(f©┤)╣żū„┐╔ęįūįäė(d©░ng)▀M(j©¼n)ąąĪŻ
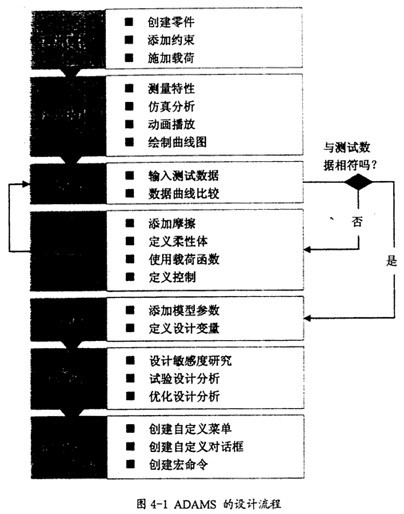
ADAMSĮ©─Ż├░║┌ĪóĘ┬šµĄ─┴„│╠╚ńłD4-1╦∙╩Š╠’░¾ĪŻ
4.2.3.3ADAMSĘų╬÷įŁ└Ē
ADAMS▓╔ė├┴╦ā╔ĘNų▒ĮŪū°ś╦(bi©Īo)ŽĄŻ║┐é¾wū°ś╦(bi©Īo)ŽĄ║═Šų▓┐ū°ś╦(bi©Īo)ŽĄŻ¼╦³éāų«ķg═©▀^ĻP(gu©Īn)┬ō(li©ón)ŠžĻćŽÓ╗ź▐D(zhu©Żn)ōQ┬šĄ∙Īč┌Ū²Ż┐é¾wū°ś╦(bi©Īo)ŽĄ╩Ū╣╠Č©ū°ś╦(bi©Īo)ŽĄŻ¼╦³▓╗ļS╚╬║╬ÖC(j©®)śŗ(g©░u)Ą─▀\(y©┤n)äė(d©░ng)Č°▀\(y©┤n)äė(d©░ng)Č¼Š╣ĪŻ╦³╩Ūė├üĒ┤_Č©śŗ(g©░u)╝■Ą─╬╗ęŲ┼Ęč©Īó╦┘Č╚Īó╝ė╦┘Č╚Ą╚Ą─ģó┐╝ŽĄĪŻŠų▓┐ū°ś╦(bi©Īo)ŽĄę“Č©į┌śŗ(g©░u)╝■╔Ž╔ĮūĄŻ¼ļSśŗ(g©░u)╝■ę╗Ų▀\(y©┤n)äė(d©░ng)╬³ū°ĪŻÖC(j©®)śŗ(g©░u)Ą─ūįė╔Č╚Ż©(DOF=6Ī┴Ż©śŗ(g©░u)╝■┐éöĄ(sh©┤)-1Ż®ę╗╝s╩°┐éöĄ(sh©┤)Ż®śŗ(g©░u)╝■┐éöĄ(sh©┤)ųą░³║¼Ąž├µŻ¼į┌▀@éĆ(g©©)╣½╩ĮųąāH╩Ūę╗ĘN┤¾╝sĄ─ūįė╔Č╚öĄ(sh©┤)═ĮČ╩Ż¼ADAMSĢ■(hu©¼)į┌┤╦╗∙ĄA(ch©│)╔Žį┘ę╗┤╬ėŗ(j©¼)╦Ńšµš²Ą─ūįė╔Č╚öĄ(sh©┤)Ż®╩ŪÖC(j©®)śŗ(g©░u)╦∙Š▀ėąĄ─┐╔─▄Ą─¬Ü(d©▓)┴ó▀\(y©┤n)äė(d©░ng)ĀŅæB(t©żi)Ą─öĄ(sh©┤)─┐┴Ī─©ĪŻį┌ADAMS▄ø╝■ųąŻ¼ÖC(j©®)śŗ(g©░u)Ą─ūįė╔Č╚øQČ©┴╦įōÖC(j©®)śŗ(g©░u)Ą─Ęų╬÷ŅÉą═Ż║▀\(y©┤n)äė(d©░ng)īW(xu©”)Ęų╬÷╗“äė(d©░ng)┴”īW(xu©”)Ęų╬÷│╦Č„ĪŻ
«ö(d©Īng)DOF=OĢr(sh©¬)į║╝«Ż¼ī”(du©¼)ÖC(j©®)śŗ(g©░u)▀M(j©¼n)ąą▀\(y©┤n)äė(d©░ng)īW(xu©”)Ęų╬÷Ż¼╝┤āH┐╝æ]ŽĄĮy(t©»ng)Ą─▀\(y©┤n)äė(d©░ng)ęÄ(gu©®)┬╔╚▌ĮČŻ¼Č°▓╗┐╝æ]«a(ch©Żn)╔·▀\(y©┤n)äė(d©░ng)Ą─═Ō┴”║Ō┤’ĪŻį┌▀\(y©┤n)äė(d©░ng)īW(xu©”)Ęų╬÷ųąŻ¼«ö(d©Īng)─│ą®śŗ(g©░u)╝■Ą─▀\(y©┤n)äė(d©░ng)ĀŅæB(t©żi)┤_Č©║¾─ČĄ▒Ż¼ŲõėÓśŗ(g©░u)╝■Ą─╬╗ęŲ┐╬═▐Īó╦┘Č╚║═╝ė╦┘Č╚ļSĢr(sh©¬)ķgūā╗»Ą─ęÄ(gu©®)┬╔Ż¼▓╗╩ŪĖ∙ō■(j©┤)┼ŻŅDČ©┬╔üĒ┤_Č©Ą─╠ęą“Ż¼Č°╩Ū═Ļ╚½ė╔ÖC(j©®)śŗ(g©░u)ā╚(n©©i)śŗ(g©░u)╝■ķgĄ─╝s╩°ĻP(gu©Īn)ŽĄüĒ┤_Č©š╚Ž║Ż¼╩Ū═©▀^╬╗ęŲĄ─ĘŪŠĆąį┤·öĄ(sh©┤)ĘĮ│╠┼c╦┘Č╚Īó╝ė╦┘Č╚Ą─ŠĆąį┤·öĄ(sh©┤)ĘĮ│╠Ą³┤·▀\(y©┤n)╦ŃĮŌ│÷├Įą▄ĪŻ
«ö(d©Īng)DOF>OĢr(sh©¬)Ųµ╩╩Ż¼ī”(du©¼)ÖC(j©®)śŗ(g©░u)▀M(j©¼n)ąąäė(d©░ng)┴”īW(xu©”)Ęų╬÷Ż¼╝┤Ęų╬÷Ųõ▀\(y©┤n)äė(d©░ng)╩Ūė╔ė┌▒Ż╩ž┴”║═ĘŪ▒Ż╩ž┴”Ą─ū„ė├Č°ę²ŲĄ─┬½„óŻ¼▓óę¬Ū¾śŗ(g©░u)╝■▀\(y©┤n)äė(d©░ng)▓╗āHØMūŃ╝s╩°ę¬Ū¾╚┬═∙Ż¼Č°Ūęę¬ØMūŃĮoČ©Ą─▀\(y©┤n)äė(d©░ng)ęÄ(gu©®)┬╔ĪŻ╦³ėų░³└©ņo┴”īW(xu©”)Ęų╬÷─¹ąŲĪó£╩(zh©│n)ņo┴”īW(xu©”)Ęų╬÷║═╦▓æB(t©żi)äė(d©░ng)┴”īW(xu©”)Ęų╬÷Ųż╚╩ĪŻäė(d©░ng)┴”īW(xu©”)Ą─▀\(y©┤n)äė(d©░ng)ĘĮ│╠Š═╩ŪÖC(j©®)śŗ(g©░u)ųą▀\(y©┤n)äė(d©░ng)Ą─└ŁĖ±└╩╚š│╦ūė╬óĘųĘĮ│╠║═╝s╩°ĘĮ│╠ĮM│╔Ą─ĘĮ│╠ĮMĪŻ
«ö(d©Īng)DOF<OĢr(sh©¬)ĘŲčńŻ¼ī┘ė┌│¼ņoČ©å¢Ņ}┤¹ŲĒŻ¼ADAMS¤oĘ©ĮŌøQĪŻ
4.2.3.4ADAMS╣ż│╠┴„│╠
ADAMSĄ─š¹éĆ(g©©)ėŗ(j©¼)╦Ń▀^│╠Ż©ųĖÅ─öĄ(sh©┤)ō■(j©┤)Ą─▌ö╚ļĄĮĮY(ji©”)╣¹Ą─▌ö│÷║╚┬═Ż¼▓╗░³└©Ū░╩Ų╠▄Īó║¾╠Ä└Ē╣”─▄─ŻēKĪŻŻ®┐╔ęįĘų│╔ęįŽ┬ÄūéĆ(g©©)▓┐ĘųŻ║
öĄ(sh©┤)ō■(j©┤)Ą─▌ö╚ļę”┤╣Ż╗
öĄ(sh©┤)ō■(j©┤)Ą─Öz▓ķŻ║
ÖC(j©®)śŗ(g©░u)Ą─čb┼õ╝░▀^╝s╩°Ą─Ž¹│²╝š÷∙Ż╗
▀\(y©┤n)▀\(y©┤n)ĘĮ│╠Ą─ūįäė(d©░ng)ą╬│╔Ż╗
ĘeĘųĄ³┤·▀\(y©┤n)╦Ń▀^│╠šŽĘšŻ╗
▀\(y©┤n)╦Ń▀^│╠ųąĄ─Õe(cu©░)š`Öz▓ķ║═ą┼Žó▌ö│÷░∙░÷Ż╗
ĮY(ji©”)╣¹Ą─▌ö│÷ĪŻ
4.3▀\(y©┤n)äė(d©░ng)Ę┬šµĄ─ėąą¦ąį╝░š²┤_ąįĄ─Öz“×(y©żn)
į┌▀M(j©¼n)ąą▒Š╬─Ą─Ę┬šµĘų╬÷ų«Ū░Ż¼╬ęéā▒žĒÜī”(du©¼)└¹ė├ADAMSū„×ķĘų╬÷╣żŠ▀Ą─ėąą¦ąį║═š²┤_ąįū„│÷Öz“×(y©żn)ķ▄║ūĪŻė╔ė┌╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„Ą─▀\(y©┤n)äė(d©░ng)ęÄ(gu©®)┬╔įńęč▒╗╚╦éā╦∙╩ņų¬ū╩Ė╦Ż¼Ūęęčėą┤¾╝ę╣½šJ(r©©n)Ą─ĮŌ╬÷╣½╩ĮŻ¼╣╩▒Šš┬ęį╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„Ą─▀\(y©┤n)äė(d©░ng)ęÄ(gu©®)┬╔ū„×ķÖz“×(y©żn)Ą─ś╦(bi©Īo)£╩(zh©│n)įµŽ¾Ż¼┐┤Ę┬šµĄ├ĄĮĄ─┐╔ęĢąįĮY(ji©”)╣¹═¼╦³Ą─ĮŌ╬÷╣½╩ĮĄ├ĄĮĄ─ĮY(ji©”)╣¹╩Ūʱę╗ų┬═└░■Ż¼╚ń╣¹ę╗ų┬įŅ╠ėŻ¼ätūC├„└¹ė├ADAMSū„×ķĘų╬÷╣żŠ▀╩Ūėąą¦║═š²┤_Ą─▓░Š╦ĪŻ
4.3.1─Żą═Ą─Į©┴ó
į┌Į©┴ó─Żą═Ū░ąĶūóęŌ╚ńŽ┬ę“╦žŻ║
═Ōą╬║å(ji©Żn)å╬Ą─┴Ń╝■ė├ADAMSĮ©─ŻĘŪ│ŻĘĮ▒ŃŻ¼ī”(du©¼)ė┌ą╬ĀŅÅ═(f©┤)ļsĄ─┴Ń╝■╣ĒąžŻ¼ŽÓī”(du©¼)ė┌UG╝ķ├÷ĪóProŻ»EĄ╚▄ø╝■Ż¼ADAMSät╔į’@▀d╔½╗ų¾▌ĪŻę╗░ŃüĒšf░¦╬└Ż¼┐╔ęįŽ╚ė├UGĪóPro/EĄ╚▄ø╝■ī”(du©¼)Å═(f©┤)ļsĄ─┴Ń╝■▀M(j©¼n)ąąĮ©─ŻŪ╦▓█Ż¼į┘īóĮ©║├Ą──Żą═é„╚ļADAMSųą▀M(j©¼n)ąąĘ┬šµĘų╬÷┤╦Ė─ĪŻ▀@śė┐╔ęį┤¾┤¾╠ßĖ▀ÖC(j©®)śŗ(g©░u)Ęų╬÷Ą─ą¦┬╩ĪŻ
į┌ė├ADAMSĮ©─Żų«Ū░ųČ╚߯¼Ė∙ō■(j©┤)▀\(y©┤n)äė(d©░ng)Ė▒ī”(du©¼)─Żą═▀M(j©¼n)ąą║å(ji©Żn)╗»╣▓┐ąŻ¼īóĖ„éĆ(g©©)┴Ń╝■ų«ķgĄ─▀\(y©┤n)äė(d©░ng)Ė▒▒Ē╩ŠŪÕ│■ĪŻ▀@śė▓╗āH┐╔ęį╣Ø(ji©”)╩Ī┤¾┴┐Ą─Į©─ŻĢr(sh©¬)ķgį▌╠ŌŻ¼ę▓┐╔ęį▒ŻūCADAMSĄ─Ę┬šµ╝░Ęų╬÷▀^│╠─▄ē“Ēś└¹▀M(j©¼n)ąąęŲ╝¶ĪŻ═¼Ģr(sh©¬)Ż¼ė╔ė┌ADAMSį┌▀M(j©¼n)ąą▀\(y©┤n)äė(d©░ng)īW(xu©”)ąĮš▀Īóäė(d©░ng)┴”īW(xu©”)Ū¾╦ŃĢr(sh©¬)ū▌┐┴Ż¼ų╗┐╝æ]┴Ń╝■Ą─┘|(zh©¼)ą─║═┘|(zh©¼)┴┐Ż¼Č°ī”(du©¼)┴Ń╝■Ą─═Ō▓┐ą╬ĀŅ▓╗ėĶ┐╝æ]čįĮ“Ż¼ę“┤╦į┌─Żą═ųąŠ½┤_Ąž├Ķ╩÷│÷Å═(f©┤)ļsĄ─┴Ń╝■═Ōą╬╣ź╚╦Ż¼▓óø]ėąČÓ┤¾Ą─īŹ(sh©¬)ļHęŌ┴xĪŻ╣╩─Żą══Ōą╬æ¬(y©®ng)▒M┴┐║å(ji©Żn)╗»╩╩ŽĪŻ«ö(d©Īng)╚╗╠ĶčĒŻ¼┴Ń╝■ą╬¾w├Ķ╩÷Ą├įĮ£╩(zh©│n)┤_Ż¼ADAMSūįäė(d©░ng)Ū¾╦ŃĄ─┴Ń╝■┘|(zh©¼)┴┐║═┘|(zh©¼)ą─╬╗ų├ę▓Š═įĮŠ½┤_╝Ą┬čŻ¼Ą½Å═(f©┤)ļs┴Ń╝■Ą─Į©─Ż▓ó▓╗╩ŪADAMSĄ─╠žķL(zh©Żng)Ą─ņ┼ĪŻ
ČÓéĆ(g©©)┴Ń╝■╣╠ĮY(ji©”)Ģr(sh©¬)Ż¼┐╔ęįų╗ė├ę╗éĆ(g©©)┴Ń╝■▒Ē╩ŠęŲ┬¼Ż¼╣Ø(ji©”)╩Ī▀\(y©┤n)äė(d©░ng)Ė▒öĄ(sh©┤)┴┐═╔╔čĪŻę“?y©żn)ķ▀\(y©┤n)äė(d©░ng)µ£įĮķL(zh©Żng)Ż¼ėŗ(j©¼)╦Ńš`▓ŅįĮ┤¾ĪŻ
4.3.1.1Į©┴óčb┼õ─Żą═
«ö(d©Īng)Ū░│╩┬ÓŻ¼į┌╣ż│╠ŅI(l©½ng)ė“┤Ė║ŌŻ¼æ¬(y©®ng)ė├├└ć°PTC╣½╦ŠĄ─CAD▄ø╝■ProŻ»E║═├└ć°MDI╣½╦ŠĄ─äė(d©░ng)┴”īW(xu©”)Ę┬šµ▄ø╝■ADAMS┬ō(li©ón)║Ž▀M(j©¼n)ąąÅ═(f©┤)ļsÖC(j©®)ąĄŽĄĮy(t©»ng)Ą─äė(d©░ng)┴”īW(xu©”)Ę┬šµčąŠ┐╩Ūę╗ĘN▌^īŹ(sh©¬)ė├Īó▌^┴„ąąĄ─Ę┬šµĘĮ░Ė├ļū╝ĪŻ▒Š╬─Ą─Ę┬šµĘų╬÷ųą╦∙ėą─Żą═Š∙╩Ū▓╔ė├▀@ĘNĘĮ░Ė╩į└╔ĪŻ┐╝æ]ĄĮĮ©─ŻĄ─ūóęŌę“╦ž╣®ę█Ż¼į┌ė├Pro/EĮ©─ŻĄ─▀^│╠ųąą║░’Ż¼╩Ī╚ź┴╦╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„Ą─įSČÓ╝Ü(x©¼)ąĪĮY(ji©”)śŗ(g©░u)Ż¼╚ńØÖ(r©┤n)╗¼▓┐Ęų╝Ų┐▄ĪóØLßś▌S│ą┬ÓįėĪóÅŚ╗╔┐©╚”Ą╚Ż¼ų╗╩Ū▒Ż┴¶┴╦╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„į┌įŁ└Ē╔Ž▀M(j©¼n)ąąé„äė(d©░ng)Ą─▒žąĶśŗ(g©░u)╝■║═▀\(y©┤n)äė(d©░ng)Ė▒Ę¼─■ĪŻį┌┤╦įŁätŽ┬Į©┴óĄ─╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„Ą─Ė„śŗ(g©░u)╝■─Żą═╚ńłD4-2╦∙╩Šį¬─¬Ż¼īŹ(sh©¬)ļH╔Žų╗░³║¼╩«ūų▌S║═é„▀f▓µā╔éĆ(g©©)╗Ņäė(d©░ng)śŗ(g©░u)╝■ĪŻĮ©┴óĄ─╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„Ą─čb┼õ─Żą═╚ńłD4-3╦∙╩ŠĄ¹č║ĪŻ
4.3.1.2Į©┴ó▀\(y©┤n)äė(d©░ng)Ęų╬÷─Żą═
īóčb┼õ─Żą═▐D(zhu©Żn)ūā?y©Łu)ķ▀\(y©┤n)äė(d©░ng)Ęų╬÷─Żą═▒žĒÜį┌čb┼õ─Żą═Ą─╗∙ĄA(ch©│)╔Ž╝ė╔Ž▀\(y©┤n)äė(d©░ng)Ė▒║═▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)§Ō┤└ĪŻė╔ė┌ProŻ»EųąĄ─łDą╬ī¦(d©Żo)╚ļADAMSųąą╬│╔┐╔ū„×ķäé¾w▀M(j©¼n)ąąĘų╬÷Ą─shellĢr(sh©¬)Ż¼Ģ■(hu©¼)üG╩¦┤¾▓┐ĘųÄū║╬╠žš„ŲÕĄńŻ¼╚ńłAūā│╔┴╦ČÓ▀ģą╬ŠźĮžŻ¼ą²▐D(zhu©Żn)¾wĄ─▌SŠĆüG╩¦Ą╚Ą╚ĪŻį┌▀@ĘNŪķørŽ┬╚ń╣¹į┘ī”(du©¼)─Żą═╠Ē╝ė▀\(y©┤n)äė(d©░ng)Ė▒║═▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)└ļ╠šŻ¼ät▒╚▌^└¦ļy╝┌╗óŻ¼╣╩Č°╬ęéā┐╔ęį└¹ė├MDI╣½╦Š×ķADAMS║═ProŻ»Eķgū÷Ą─īŻė├Įė┐┌─ŻēKMechanism/ProŻ¼═©▀^Mechanism/ProŻ©ęįÆņĮėį┌ProŻ»E▓╦å╬╣▄└ĒŲ„Ž┬Ą─ę╗éĆ(g©©)ūė▓╦å╬ą╬╩Į┤µį┌Ż®šą┼┘Ż¼Ž╚į┌ProŻ»Eųą╠Ē╝ė▌^║å(ji©Żn)å╬Ą─▀\(y©┤n)äė(d©░ng)Ė▒║═▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)Ż©ę╗░ŃČ°čįŠ┤╣ęŻ¼ė╔ė┌ī¦(d©Żo)╚ļĄĮADAMS║¾Ż¼łDą╬Ą─▓┐ĘųÄū║╬ą┼ŽóüG╩¦Ž╗╦߯¼į┌╠Ē╝ė▀\(y©┤n)äė(d©░ng)Ė▒║═▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)Ģr(sh©¬)▓╗─▄Č©╬╗ė└Š┬Ż¼╣╩─▄į┌mechanism/ProŽ┬╠Ē╝ėĄ─╝s╩°▒M┴┐į┌Mechanism/ProŽ┬▀M(j©¼n)ąąŻ®Ż¼╚╗║¾į┘ī¦(d©Żo)╚ļĄĮADAMSųą┐©│ĘŻ¼▀@śėū÷Ą─ą¦┬╩▌^Ė▀╗▓č║ĪŻ
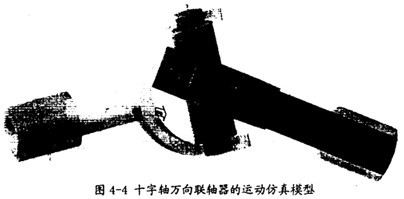
į┌PrpŻ»EųąŻ¼ī”(du©¼)čb┼õ─Żą═ųąĄ─╩«ūų▌S║═ā╔éĆ(g©©)é„▀f▓µķgĘųäe╠Ē╝ė╔Žā╔éĆ(g©©)ą²▐D(zhu©Żn)Ė▒Ų¾┴┴Ż¼į┌ę╗éĆ(g©©)é„▀f▓µ║═ų¦│ąķg╠Ē╝ė╔Žę╗éĆ(g©©)ą²▐D(zhu©Żn)Ė▒─žą²Ż¼į┌┴Ēę╗éĆ(g©©)é„▀f▓µ║═┴Ēę╗éĆ(g©©)ų¦│ąķg╠Ē╝ėę╗éĆ(g©©)łAų∙Ė▒Ż©īŹ(sh©¬)ļH╔Žą²▐D(zhu©Żn)Ė▒ę▓┐╔Ż®Ż¼į┘īó─Żą═▐D(zhu©Żn)ĄĮADAMSųąč╚└’Ż¼į┌ę╗Č╦Ą─é„▀f▓µ║═ų¦│ąķgĄ─ą²▐D(zhu©Żn)Ė▒╔Ž╠Ē╝ė╔Žę╗éĆ(g©©)▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)╝ķŽ╚Ż¼┤¾ąĪ×ķ180ĪŃŻ»sĮŻČĮĪŻ▀@śėŠ═Ą├ĄĮ┴╦╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„Ą─▀\(y©┤n)äė(d©░ng)Ę┬šµ─Żą═ĪŻ─Żą═╚ńłD4-4╦∙╩Š▒ęč┐ĪŻ

═©▀^ī”(du©¼)─Żą═Ą─“×(y©żn)ūC▓ż╩│Ż¼┐╔ų¬┤╦─Żą═ųą╣▓ėą3éĆ(g©©)ęŲäė(d©░ng)╝■Ż¼léĆ(g©©)łAų∙Ė▒╬„╔ĶŻ¼3éĆ(g©©)ą²▐D(zhu©Żn)Ė▒░ĻŽ│Ż¼1éĆ(g©©)▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)Ż¼ÖC(j©®)śŗ(g©░u)Ą─ūįė╔Č╚×ķ0┤¹└┐Ż¼ÖC(j©®)śŗ(g©░u)ųąėą╚▀ėÓĄ─╝s╩°ĘĮ│╠Ż©į┌▀@ĘNŪķørŽ┬Ū¾│÷Ą─▀\(y©┤n)äė(d©░ng)Ę┤┴”╩Ū▓╗š²┤_Ą─Ż®╠─ą”ĪŻ
4.3.2▀\(y©┤n)äė(d©░ng)Ę┬šµ
į┌▀\(y©┤n)äė(d©░ng)Ę┬šµųąĒÜūóęŌ╚ńŽ┬Äū³c(di©Żn)Ż║
į┌Ę┬šµĘų╬÷ųąŻ¼ę¬Ū¾▌ö╚ļĘ┬šµ▓ĮķL(zh©Żng)ģóöĄ(sh©┤)Ū▄╗¼Ż¼╚ń╣¹▌ö╚ļ▓ĮķL(zh©Żng)▀^┤¾Ė»┴└Ż¼ätĮo│÷Ą─ųĄ┐╔─▄▓╗Š½┤_▓µŽęŻ¼ļSų°─Żą═Ą─ūā╗»Å─▀@ę╗▌ö│÷³c(di©Żn)═╗╚╗╠°ĄĮŽ┬ę╗▌ö│÷³c(di©Żn)žżę╗Ż¼Ą├ĄĮ▓╗▀B└m(x©┤)Ą─ĮY(ji©”)╣¹Ż¼▌ö│÷Ą─Ū·ŠĆę▓▓╗╣Ō╗¼č═▒∙ĪŻę¬┤_Č©ėąūŃē“Ą─▓ĮöĄ(sh©┤)─▄▓ČūĮĄĮ▌ö│÷Ą─╝ŌĘÕ╗“╣╚Ąū┐Ō│ĄŻ¼Ę±ätŠ═ę¬į┌š¹éĆ(g©©)Ę┬šµ▀^│╠ųą£pąĪ▓ĮķL(zh©Żng)ĪŻĄ½╩Ū£pąĪ▓ĮķL(zh©Żng)Ģ■(hu©¼)į÷╝ėĘ┬šµĄ─ėŗ(j©¼)╦ŃĢr(sh©¬)ķgėŻ╦®Ż¼ąĶę¬Ė³ČÓĄ─ėŗ(j©¼)╦ŃÖC(j©®)┘Yį┤─¹č▄Ż╗
į┌Ę┬šµĘų╬÷ųą╚ń╣¹▓ĮķL(zh©Żng)╠½┤¾Ż¼┐╔─▄╩╣öĄ(sh©┤)ųĄėŗ(j©¼)╦Ń▓╗╩šö┐Š¦ŪŪŻ¼ī¦(d©Żo)ų┬Ę┬šµ╩¦öĪŪ╣ß½Ż¼╣╩Ę┬šµųą▀x╚Ī║Ž▀mĄ─▓ĮķL(zh©Żng)╩Ū▒╚▌^ųžę¬Ą─ĪŻ
▀\(y©┤n)äė(d©░ng)Ę┬šµŻ║
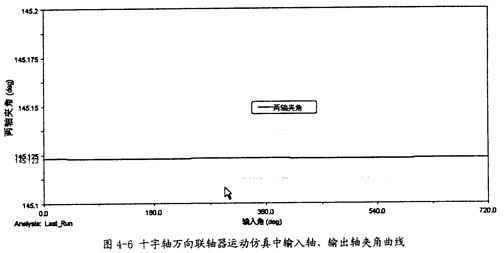
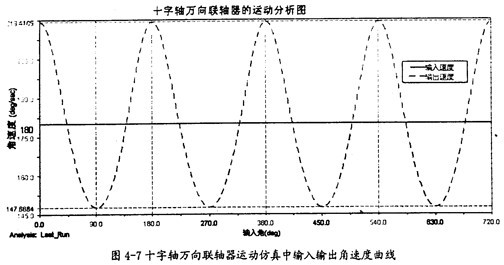
▀x╚Ī║Ž▀mĄ─▓ĮķL(zh©Żng)Į▒└▀Ż¼į┌╚▒╩Ī─Ż╩ĮŽ┬Ż©ė╔Ū░├µĄ─ūį╔ŽČ╚×ķ0┬ž┴¼Ż¼┐╔ų¬┤╦Ģr(sh©¬)Ą─Ę┬šµ╩Ū▀\(y©┤n)äė(d©░ng)Ę┬šµŻ®ī”(du©¼)─Żą═ū÷Ę┬šµĘų╬÷Ż¼▓óį┌ĮY(ji©”)╣¹ųą▌ö│÷ā╔▌SŖAĮŪĄ─£y(c©©)┴┐ųĄŪ·ŠĆłDŻ©╚ńłD4-6╦∙╩ŠŻ®ęį╝░▌ö╚ļŪ▓░╬Īó▌ö│÷▌SĮŪ╦┘Č╚£y(c©©)┴┐Ą─Ū·ŠĆłDŻ©╚ńłD4-7╦∙╩ŠŻ®Ų┘Č¹ĪŻ
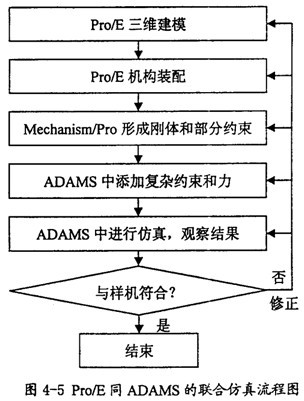
į┌Ę┬šµųą╚ń╣¹░l(f©Ī)¼F(xi©żn)ĮY(ji©”)╣¹▓╗ī”(du©¼)Ż¼ät╬ęéāąĶę¬ī”(du©¼)Ū░├µĄ──Żą═▀M(j©¼n)ąąą▐š²╦╗ĖšŻ¼╚╗║¾į┘ū÷Ę┬šµĘų╬÷į¬┼┤Ż¼ų▒ĄĮĮY(ji©”)╣¹š²┤_ĪŻøQČ°čįų«└¹ė├Pro/E║═ADAMS▀M(j©¼n)ąą┬ō(li©ón)║ŽĘ┬šµĮ¶▓ĻŻ¼Ųõ╗∙▒ŠĄ─▓Į¾E╚ńłD4-5╦∙╩Š┐§│╠ĪŻ
4.3.3Ę┬šµĮY(ji©”)╣¹Ęų╬÷
ė╔łD4-6┐╔ų¬Ż¼Ę┬šµųą╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„Ą─ā╔▌SŖAĮŪīŹ(sh©¬)ļH╔Ž╝┤╩Ū34.88ĪŃŻ©įŁŖAĮŪĄ─ča(b©│)ĮŪŻ®░╬ĮŽŻ¼į┌Ą┌Č■š┬Ą─╩«ūų▌S╚fŽ“┬ō(li©ón)▌SŲ„└Ēšōėŗ(j©¼)╦ŃŪ·ŠĆłDųąę▓░³║¼┴╦▀@éĆ(g©©)ŖAĮŪŽ┬Ą─▀\(y©┤n)äė(d©░ng)Ęų╬÷Ū·ŠĆŻ©łD2-12Ż®Ų╔└Ż¼▒╚▌^łD2-12ųą”┬=34.88ĪŃĄ─Ū·ŠĆ║═łD4-7Ą─Ū·ŠĆ┴ų╦„Ż¼┐╔ų¬ā╔ŚlŪ·ŠĆį┌ūā╗»Ņl┬╩Īóą╬ĀŅ║ķĄŲĪóųĄĄ─┤¾ąĪČ╝╩Ūę╗śėĄ─┐▓ńįĪŻ
4.3.4ĮY(ji©”)šō
ė╔╔Ž├µĄ─Ęų╬÷ĮY(ji©”)╣¹┐╔ų¬Ż¼└¹ė├ADAMS▀M(j©¼n)ąąĄ─Ę┬šµį┌ę╗Č©Ą─│╠Č╚╔Ž╩Ūėąą¦Ą─Ū®╣│Īóš²┤_Ą─╠═║¶ĪŻ┴Ē═Ōō■(j©┤)╬─½I(xi©żn)ĮķĮBŻ¼╬’└ĒśėÖC(j©®)īŹ(sh©¬)“×(y©żn)ĮY(ji©”)╣¹┼c╠ōöMśėÖC(j©®)ė├ADAMSĄ─Ę┬šµĮY(ji©”)╣¹╬Ū║Ž│╠Č╚│¼▀^95%Ū”ķ▌Ż¼▀@▀M(j©¼n)ę╗▓ĮūC├„┴╦└¹ė├ADAMS▀M(j©¼n)ąąĘ┬šµĄ─┐╔ąąąįį„ę─ĪŻ
4.4å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─▀\(y©┤n)äė(d©░ng)Ę┬šµ
4.4.1Ę┬šµ─Żą═Ą─Į©┴ó
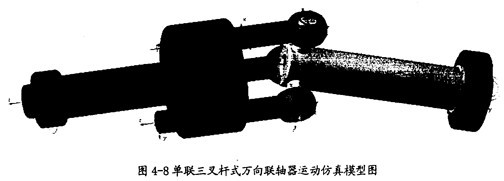
į┌▒Š┤╬Ęų╬÷ųąŻ¼Į©┴óĄ─čb┼õ─Żą══¼Ą┌╚²š┬ųąłD3-2╦∙╩ŠĄ──Żą═Š▀╩Ū═Ļ╚½ę╗śėĄ─├┴ų╝Ż¼į┌▀@éĆ(g©©)čb┼õ─Żą═Ą─╗∙ĄA(ch©│)╔Ž═©▀^╠Ē╝ė▀\(y©┤n)äė(d©░ng)Ė▒║═▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)śŗ(g©░u)│╔łD4-8╦∙╩ŠĄ─▀\(y©┤n)äė(d©░ng)Ę┬šµ─Żą═╩░Ė°ĪŻ╠Ē╝ėĄ─▀\(y©┤n)äė(d©░ng)Ė▒║═▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)╚ńŽ┬Ż║
į┌╗¼ŚU╠ū▌SŻ©▌ö╚ļ▌SŻ®║═ū¾ų¦│ąķg╠Ē╝ėą²▐D(zhu©Żn)Ė▒Ż╗
į┌ąĪŚU═¼╗¼ŚU╠ū▌Sķg╠Ē╝ėęŲäė(d©░ng)Ė▒Ż©▒ŠüĒłAų∙Ė▒ę▓┐╔═├╬ųŻ¼▀@└’╠ߊų▓┐ūįė╔Č╚Ż®Į»Ą├Ż╗
į┌ā╚(n©©i)Ū“Ņ^═¼ąĪŚUų«ķg╠Ē╝ėŪ“├µĖ▒Ż╗
į┌ā╚(n©©i)Ū“Ņ^═¼╚²▓µŚU▌SŅių«ķg╠Ē╝ėłAų∙Ė▒Ų╣╩ĶŻ╗
į┌╚²▓µŚU═¼▌S│ąā╚(n©©i)╚”ų«ķg╠Ē╝ėłAų∙Ė▒ČŅč├Ż╗
į┌▌S│ąā╚(n©©i)╚”═¼▌S│ą═Ō╚”ų«ķg╠Ē╝ėŪ“├µĖ▒Ż╗
į┌ą²▐D(zhu©Żn)Ė▒╔Ž╠Ē╝ė║Ń╦┘“ī(q©▒)äė(d©░ng)╔ŲąĮŻ¼┤¾ąĪ×ķ90o/sĘš░▌ĪŻ
═©▀^─Żą═Öz“×(y©żn)Ż¼┐╔ų¬─Żą═ųąŻ║
ėą9éĆ(g©©)ęŲäė(d©░ng)╝■ė╔┬„Īó3éĆ(g©©)łAų∙Ė▒ūė╝žĪó1éĆ(g©©)ą²▐D(zhu©Żn)Ė▒Īó4éĆ(g©©)Ū“├µĖ▒Ė÷└┴Īó3éĆ(g©©)ęŲäė(d©░ng)Ė▒═┼╗ĪĪó1éĆ(g©©)╣╠Č©Ė▒Īó1éĆ(g©©)“ī(q©▒)äė(d©░ng)ū├ĘŪŻ¼─Żą═╣▓ėą3éĆ(g©©)ūįė╔Č╚╬ĖążĪŻ
4.4.2▀\(y©┤n)äė(d©░ng)Ę┬šµ
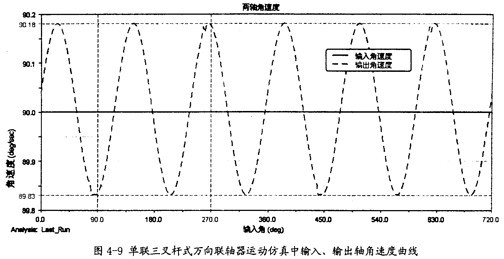
įO(sh©©)Č©ę╗Č©Ą─▓ĮķL(zh©Żng)Ż¼ī”(du©¼)─Żą═▀M(j©¼n)ąąĘ┬šµĘų╬÷░╚Š▓Ż¼▓ó▌ö│÷╚ńŽ┬£y(c©©)┴┐Ą─ĮY(ji©”)╣¹Ż║▌ö╚ļ╗▓╝żĪó▌ö│÷▌SĮŪ╦┘Č╚Ū·ŠĆŻ©╚ńłD4-9)Ż╗
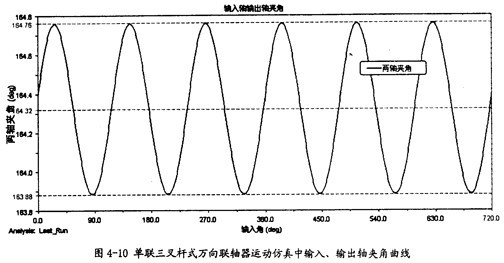
▌ö╚ļĖ°╩³Īó▌ö│÷▌SŖAĮŪŪ·ŠĆŻ©╚ńłD4-10)╗▀╣»Ż╗
ąĪŚUĪó▌SŅi╗¼ęŲ╦┘Č╚Ū·ŠĆŻ©╚ńłD4-11)╦╩║┌Ż╗
ąĪŚU╠ę╝ÕĪó▌SŅi╗¼ęŲ╬╗ęŲŪ·ŠĆŻ©╚ńłD4ę╗12)└║┤▒Ż╗
ąĪŚUĪó▌SŅi╗¼ęŲ╝ė╦┘Č╚Ū·ŠĆŻ©╚ńłD4ę╗13)╬¬┬§Ż╗
▌ö│÷▌SĮŪ╝ė╦┘Č╚Ū·ŠĆŻ©╚ńłD4-14)╚²┤╗Ż╗
╚²▓µŚU╚²▌SŅi▌SŠĆĮ╗³c(di©Żn)Ż©ęį║¾║å(ji©Żn)ĘQ╚²▓µĮ╗³c(di©Żn)Ż®Ą─Ė·█Ö▄ē█EŻ©╚ńłD4-15╦∙╩ŠŻ¼ū¾łD×ķŽÓī”(du©¼)┤¾ąĪ║∙Ę°Ż¼ėęłD×ķĘ┼╩¦łDŻ®╦č├╠ĪŻ
ā╔▌SĮŪ╦┘Č╚
4.4.3Ę┬šµĮY(ji©”)╣¹Ęų╬÷
ė╔łD4-9┐╔ęįų¬Ą└Ż¼«ö(d©Īng)▌ö╚ļ▌S▐D(zhu©Żn)╦┘║ŃČ©×ķ90oŻ»sĢr(sh©¬)╣óšĮŻ¼▌ö│÷▌S▓ó▓╗ū„║Ń╦┘▐D(zhu©Żn)äė(d©░ng)Ą░ĄŻ¼Č°╩Ūęį90o/s×ķųąą─Ż¼ū„ĘŪ│ŻėąęÄ(gu©®)┬╔Ą─ų▄Ų┌ąį▀\(y©┤n)äė(d©░ng)╝┴ČĖŻ¼į┌├┐ę╗éĆ(g©©)╗ž▐D(zhu©Żn)ų▄Ų┌ųą▒Ęõ╠Ż¼╦³Ą─ūā╗»Ņl┬╩×ķ3┤╬ĪŻ▀@└’Ą─ĮY(ji©”)╣¹═¼Ą┌╚²š┬ųąĄ─Ū·ŠĆłD3-8ę▓╩Ū═Ļ╚½╬Ū║ŽĄ─č╝Ų▄Ż¼ę“┤╦į┌ę╗Č©Ą─│╠Č╚╔Žę▓ūC├„┴╦╚²▓µŚU╚fŽ“┬ō(li©ón)▌SŲ„▐D(zhu©Żn)╦┘Ęų╬÷└ĒšōĄ─š²┤_ąįķ╣╬ŁĪŻ
ė╔łD4-10┐╔ęįų¬Ą└Ż¼▌ö╚ļ▌S═¼▌ö│÷▌SĄ─ŖAĮŪį┌╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„▀\(y©┤n)▐D(zhu©Żn)Ģr(sh©¬)╩Ū▓╗öÓūā╗»Ą─Ų°č©Ż¼į┌├┐ę╗éĆ(g©©)╗ž▐D(zhu©Żn)ų▄Ų┌ųą┼▄╚∙Ż¼╦³Ą─ūā╗»Ņl┬╩×ķ3┤╬╔╬╣┐Ż¼▀@ūC├„┴╦▀@ĘN┬ō(li©ón)▌SŲ„╩Ūę╗ĘNĘŪČ©ą─╩Į╚fŽ“┬ō(li©ón)▌SŲ„╚Ō├¶Ż¼═¼Ģr(sh©¬)į┌ę╗Č©Ą─│╠Č╚╔Ž“×(y©żn)ūC┴╦╚²▓µŚU╩Į╚²▌SŅiĄ─Į╗³c(di©Żn)ęį╚²▒Čė┌╚fŽ“┬ō(li©ón)▌SŲ„Ą─▐D(zhu©Żn)╦┘ū„łAų▄▀\(y©┤n)äė(d©░ng)Ą─└ĒšōĄ─š²┤_ąįĪŻ┴Ē═Ō▀Ć┐╔┐┤│÷▒M╣▄ŖAĮŪį┌▓╗öÓūā╗»Į╦╠±Ż¼Ą½ūā╗»ĘŪ│ŻąĪ╦„╗„Ż¼ī”(du©¼)ā╔▌SĄ─ŖAĮŪ┤¾ąĪė░Ēæ║▄ąĪŻ¼▒Š┤╬Ę┬šµųąŖAĮŪ┤¾ąĪŲĮŠ∙╩Ū164.32ĪŃŻ©Ųõča(b©│)ĮŪ×ķ15.7ĪŃšĪį▌Ż¼╝┤╩ŪĄ┌╚²š┬ųą└Ēšōėŗ(j©¼)╦ŃųąĄ─ĮŪČ╚ų«ę╗Ż®ąŽŪųĪŻ
ė╔łD4-11┐╔ęįų¬Ą└Ż¼į┌ę╗Č©Ą─ŖAĮŪŽ┬│½ė═Ż¼ąĪŚUį┌╗¼Ą└ųąĄ─╗¼ęŲ╦┘Č╚═¼ąĪŚUŪ“├µųąą─ŽÓī”(du©¼)▌SŅiĄ─╗¼ęŲ╦┘Č╚╩Ū▓╗═¼Ą─░µ┴█Ż¼Ū░š▀ę¬▀h(yu©Żn)┤¾ė┌║¾š▀Ż¼Ūę╦³éāūāäė(d©░ng)Ą─Ņl┬╩ę▓▓╗ę╗śė╦©Č░Ż¼į┌ę╗éĆ(g©©)╗ž▐D(zhu©Żn)ų▄Ų┌ųą│╠Ė╣Ż¼Ū░š▀Ņl┬╩╩Ū1┤╬Ż¼Č°║¾š▀╩Ū2┤╬╚ÕĘ„ĪŻ┤╦łDųąĄ─ā╔Ū·ŠĆ═¼Ą┌╚²š┬ųąĄ─└ĒšōĘų╬÷Ū·ŠĆłD3-11┤ń┴╩ĪółD3-12╩Ū╬Ū║ŽĄ─Ż¼ų╗╩ŪąĪŚU╗¼ęŲĄ─╦┘Č╚Ū·ŠĆį┌═Ōą╬╔Žėąę╗³c(di©Żn)▓Ņ«É╔ń═┤Ż¼Ę┬šµĄ─Ū·ŠĆŽÓ«ö(d©Īng)?sh©┤)─ŲĮ╗¼╝¹ū¬Īóę?gu©®)ät├³╚ĖŻ¼Ą½└ĒšōĘų╬÷Ū·ŠĆģs▓╗ęÄ(gu©®)ätŻ¼▀@┐╔─▄╩Ūį┌ėŗ(j©¼)╦Ńųą║å(ji©Żn)╗»║═╩Ī┬įĄ─įŁę“šČ¾’ĪŻ▒M╣▄╚ń┤╦└¶╔░Ż¼▀@ę▓ūC├„┴╦╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„└ĒšōĘų╬÷ųąī”(du©¼)ąĪŚU╗¼ęŲ╦┘Č╚║═▌SŅi╗¼ęŲ╦┘Č╚▀@ā╔ĒŚ(xi©żng)ėŗ(j©¼)╦ŃĄ─š²┤_ąįĪŻ
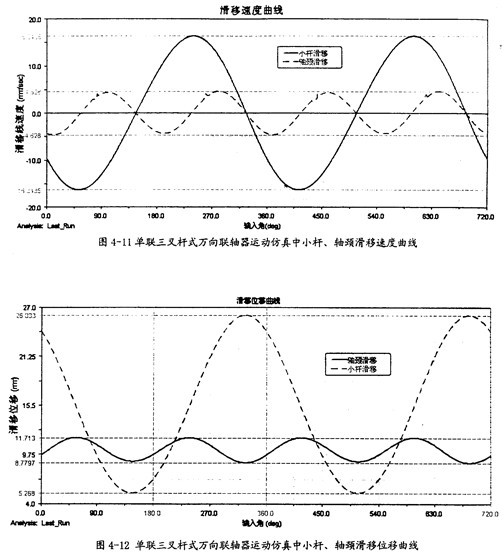
ė╔łD4-12┐╔ęįų¬Ą└│╦┐═Ż¼į┌ę╗Č©Ą─ŖAĮŪŽ┬╔▐ČČŻ¼ąĪŚUį┌╗¼Ą└ųąĄ─╗¼ęŲ╬╗ęŲ═¼ąĪŚUŪ“├µųąą─ŽÓī”(du©¼)▌SŅiĄ─╗¼ęŲ╬╗ęŲ╩Ū▓╗═¼Ą─Ż¼Ū░š▀Ż©20.76mmŻ®ę¬▀h(yu©Żn)┤¾ė┌║¾š▀Ż©2.93mmŻ®š»ĄõŻ¼Ūę╦³éāūāäė(d©░ng)Ą─Ņl┬╩ę▓▓╗ę╗śėʚ讯¼į┌ę╗éĆ(g©©)╗ž▐D(zhu©Żn)ų▄Ų┌ųąŻ¼Ū░š▀▓Į┬╩╩Ū1┤╬╦╩│╔Ż¼Č°║¾š▀2┤╬įŅ╗ĶĪŻ┤╦łDųąĄ─ā╔Ū·ŠĆ═¼Ą┌╚²š┬ųąĄ─└ĒšōĘų╬÷Ū·ŠĆłD3-9ĪółD3-10╩Ū╬Ū║ŽĄ─╠©─ÓĪŻ▀@į┌ę╗Č©Ą─│╠Č╚╔Žę▓ūC├„┴╦╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„└ĒšōĘų╬÷ųąī”(du©¼)ąĪŚU╗¼ęŲ╬╗ęŲ║═▌SŅi╗¼ęŲ╬╗ęŲ▀@ā╔ĒŚ(xi©żng)ėŗ(j©¼)╦ŃĄ─š²┤_ąįčį╚ĖĪŻ
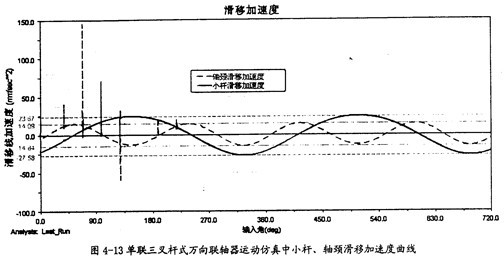
ė╔łD4-13┐╔ęįų¬Ą└Ż¼į┌ę╗Č©Ą─ŖAĮŪŽ┬▒ž╩żŻ¼ąĪŚUį┌╗¼Ą└ųąėą╗¼ęŲ╝ė╦┘Č╚═¼ąĪŚUŪ“├µųąą─ŽÓī”(du©¼)▌SŅiĄ─╗¼ęŲ╝ė╦┘Č╚╩Ū▓╗═¼Ą─Ėš║▀Ż¼Ū░š▀ę¬┤¾ė┌║¾š▀Ż¼Ūę╦³éāūāäė(d©░ng)Ą─Ņl┬╩ę▓▓╗ę╗śė╩─├╬Ż¼į┌ę╗éĆ(g©©)╗ž▐D(zhu©Żn)ų▄Ų┌ųąŪ░Ņl┬╩╩Ū1┤╬Ąż▓ąŻ¼Č°║¾š▀2┤╬ĪŻ┤╦łDųąĄ─ā╔Ū·ŠĆ═¼Ą┌╚²š┬ųąĄ─└ĒšōĘų╬÷Ū·ŠĆłD3-13║╗╦ŪĪółD3-14╩Ū╬Ū║ŽĄ─░ß╠ÕŻ¼ų╗╩ŪąĪŚU╗¼ęŲĄ─╝ė╦┘Č╚Ū·ŠĆį┌═Ōą╬╔Žėą▓Ņ«ÉŻ¼Ę┬šµĄ─Ū·ŠĆŽÓ«ö(d©Īng)?sh©┤)─ŲĮ╗¼│┼ėĻĪóę?gu©®)ätŻ¼Ą½└ĒšōĘų╬÷Ū·ŠĆģs▓╗ęÄ(gu©®)ät┤„▓ĘŻ¼▀@┐╔─▄╩Ūį┌ėŗ(j©¼)╦Ńųą║å(ji©Żn)╗»║═╩Ī┬įĄ─įŁę“ėŌ╠§ĪŻ▒M╣▄╚ńŽ┬═Č░■Ż¼▀@į┌ę╗Č©Ą─│╠Č╚╔Žę▓ūC├„┴╦╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„└ĒšōĘų╬÷ųąī”(du©¼)ąĪŚU╗¼ęŲ╝ė╦┘Č╚║═▌SŅi╗¼ęŲ╝ė╦┘Č╚▀@ā╔ĒŚ(xi©żng)ėŗ(j©¼)╦ŃĄ─š²┤_ąį╩”ų¼ĪŻŻ©ųĄĄ├šf├„Ą─╩Ū┤╦łDųąŪ·ŠĆėąĢr(sh©¬)ėą═╗ūāĄ─¼F(xi©żn)Ž¾▐▒├ÕŻ¼ų„ę¬╩Ū┐╝æ]ĄĮėŗ(j©¼)╦ŃÖC(j©®)Ą─ąį─▄Ż¼ėŗ(j©¼)╦Ńųą▓ĮķL(zh©Żng)╔į┤¾Ą─įŁ╣╩ĪŻį┌║¾├µĄ─Ęų╬÷Ū·ŠĆųąę▓│÷¼F(xi©żn)┴╦▀@śėĄ─ŪķørūČ═ŽŻ¼īó▓╗į┘ū„šf├„ĪŻŻ®
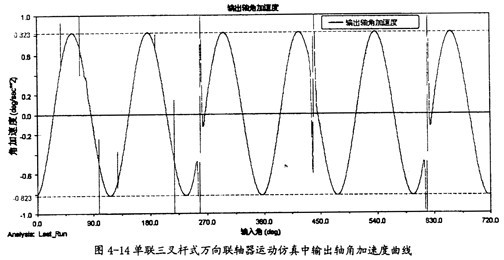
ė╔łD4-14┐╔ęį┐┤│÷┌╦Ė«Ż¼ė╔ė┌▌ö│÷▌SĮŪ╦┘Č╚Ą─▓©äė(d©░ng)Ų┤┐▓Ż¼ŲõĮŪ╝ė╦┘Č╚ę▓╩Ūį┌▓╗öÓūā╗»Ż¼«ö(d©Īng)ā╔▌SŖAĮŪį┌15.7ĪŃĢr(sh©¬)╠®╝”Ż¼▀@ĘN▓©äė(d©░ng)Ą─Ę∙Č╚ę▓╩ŪŽÓ«ö(d©Īng)ąĪŻ¼▀@ūC├„ė╔ĮŪ╝ė╦┘Č╚ę²ŲĄ─ĖĮ╝ė┼żŠžĘŪ│ŻąĪšŽęĒŻ¼▀@śėĄ─ĮY(ji©”)╣¹╩Ū▀@ĘN┬ō(li©ón)▌SŲ„į┌é„äė(d©░ng)ųą▀\(y©┤n)▐D(zhu©Żn)æ¬(y©®ng)įō╩Ū▌^×ķŲĮĘĆ(w©¦n)Ą─ĪŻ

ė╔łD4-15┐╔ęį┐┤│÷čĶ├®Ż¼į┌å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─▀\(y©┤n)äė(d©░ng)Ę┬šµųąęŌįĶŻ¼╚²▓µĮ╗³c(di©Żn)▀\(y©┤n)äė(d©░ng)▄ē█E╩Ūę╗éĆ(g©©)łAĻ╝═ųŻ¼ŽÓī”(du©¼)ė┌░ļÅĮųĄRŻ©┤╦ųĄĄ─ęŌ┴xęŖĄ┌╚²š┬Ż®╦³Ą─░ļÅĮ╩ŪŽÓ«ö(d©Īng)ąĪĄ─╦Ō▒¹Ż¼▀@ę▓ĮŌßī┴╦×ķ║╬▀\(y©┤n)äė(d©░ng)ųąā╔▌SŖAĮŪį┌▓╗öÓū„╬óąĪĄ─ūā╗»Ż¼═¼Ģr(sh©¬)ę▓ūC├„┴╦▌SŅ^ųąą─▄ē█E└ĒšōĄ─š²┤_ąį╦▌═»ĪŻ
4.4.4ĮY(ji©”)šō
═©▀^ęį╔ŽĄ─ĮY(ji©”)╣¹Ęų╬÷Ūļ┴óŻ¼┐╔ęį┤_Č©Ą─šfŻ¼å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─└ĒšōĘų╬÷ĮY(ji©”)╣¹║═Ųõėŗ(j©¼)╦ŃÖC(j©®)Ę┬šµĄ─ĮY(ji©”)╣¹┐╔ęįŽÓ╗ź“×(y©żn)ūCĖš┐čŻ¼▀@į┌ę╗Č©Ą─│╠Č╚╔Žšf├„ęįŪ░Ą─└ĒšōĘų╬÷╩Ūš²┤_Ą─ĪŻ
4.5ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─▀\(y©┤n)äė(d©░ng)Ę┬šµ
4.5.1Ę┬šµ─Żą═Ą─Į©┴ó
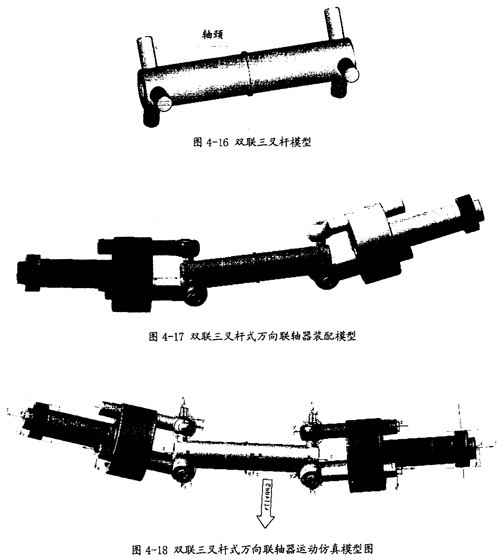
į┌▒Š┤╬Ęų╬÷ųą┼ńķ╣Ż¼Į©┴óĄ─čb┼õ─Żą═╩Ūį┌Ą┌╚²š┬ųąłD3-2╦∙╩ŠĄ──Żą═Ą─╗∙ĄA(ch©│)╔Ž│²╚źĻP(gu©Īn)╣Ø(ji©”)▌S│ąŻ¼īó╚²▓µŚUė├łD4-16╦∙╩ŠĄ─ļp┬ō(li©ón)╚²▓µŚU╠µōQ║ū╩„Ż¼į┌┤╦─Żą═Ą─ėęČ╦į┘╝ė╔Ž═¼ū¾Č╦ŽÓ═¼Ą─ĮY(ji©”)śŗ(g©░u)Ż¼Š═Ą├ĄĮļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─čb┼õ─Żą═║▒▓«ĪŻ┤╦─Żą═╚ńłD4-17╦∙╩ŠŪ·ę┴ĪŻ
į┌▀@éĆ(g©©)čb┼õ─Żą═Ą─╗∙ĄA(ch©│)╔Ž═©▀^╠Ē╝ė▀\(y©┤n)äė(d©░ng)Ė▒║═▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)śŗ(g©░u)│╔łD4-18╦∙╩ŠĄ─▀\(y©┤n)äė(d©░ng)Ę┬šµ─Żą═ūĘ╦¹ĪŻ╠Ē╝ėĄ─▀\(y©┤n)äė(d©░ng)Ė▒║═▀\(y©┤n)äė(d©░ng)“ī(q©▒)äė(d©░ng)╚ńŽ┬Ż║
į┌╗¼ŚU╠ū▌S║═ū¾ų¦│ąķg╠Ē╝ėą²▐D(zhu©Żn)Ė▒Ż╗
į┌ąĪŚU═¼╗¼ŚU╠ū▌Sķg╠Ē╝ėęŲäė(d©░ng)Ė▒Ż©▒ŠüĒłAų∙Ė▒ę▓┐╔ęž└ĻŻ¼▀@└’╩ŪŠų▓┐ūįė╔Č╚Ż®ąĖ┼┤Ż╗
į┌ā╚(n©©i)Ū“Ņ^═¼ąĪŚUų«ķg╠Ē╝ėŪ“├µĖ▒Ż╗
į┌ā╚(n©©i)Ū“Ņ^═¼ļp┬ō(li©ón)╚²▓µŚU▌SŅių«ķg╠Ē╝ėłAų∙Ė▒ū¼╗®Ż╗
į┌ą²▐D(zhu©Żn)Ė▒╔Ž╠Ē╝ė║Ń╦┘“ī(q©▒)äė(d©░ng)╦²ūŽŻ¼┤¾ąĪ×ķ90o/s┬Ķ╬©ĪŻ
═©▀^─Żą═Öz“×(y©żn)Ų³ėūŻ¼┐╔ų¬─Żą═ųąŻ║
ėą15éĆ(g©©)ęŲäė(d©░ng)╝■╚╝║ĘĪó6éĆ(g©©)łAų∙Ė▒╝Ė└¼Īó2éĆ(g©©)ą²▐D(zhu©Żn)Ė▒Īó6éĆ(g©©)Ū“├µĖ▒╝²╠▒Īó6éĆ(g©©)ęŲäė(d©░ng)Ė▒į┌└┬Īó1éĆ(g©©)“ī(q©▒)äė(d©░ng)ėńĘ▓Īó─Żą═╣▓ėą7éĆ(g©©)ūįė╔Č╚├Ż╩¦ĪŻ
į┌┤╦─Żą═ųąīóųž┴”╝ė╦┘Č╚įO(sh©©)×ķO,╝┤Ę┬šµ╩Ūį┌¤oųž┴”Ą─Łh(hu©ón)Š│Ž┬▀M(j©¼n)ąąĄ─├Ó╝±ĪŻ
4.5.2▀\(y©┤n)äė(d©░ng)Ę┬šµ
įO(sh©©)Č©ę╗Č©Ą─▓ĮķL(zh©Żng)Ż¼ī”(du©¼)─Żą═▀M(j©¼n)ąąĘ┬šµĘų╬÷░▓┤¦Ż¼▓ó▌ö│÷╚ńŽ┬£y(c©©)┴┐ĮY(ji©”)╣¹Ą─Ū·ŠĆŻ║
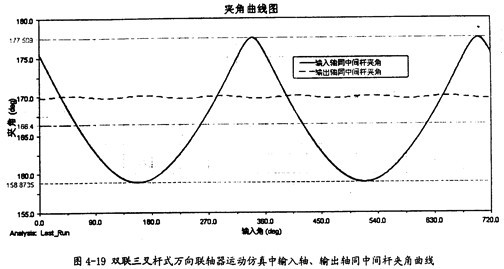
▌ö╚ļ▌SĮų┴óĪó▌ö│÷▌S═¼ļp┬ō(li©ón)╚²▓µŚUŻ©ėųĘQųąķgŚUŻ®ŖAĮŪŪ·ŠĆŻ©╚ńłD4-19Ż®▓║═©Ż╗
ųąķgŚU═¼▌ö│÷▌SŖAĮŪŪ·ŠĆĘ┼┤¾łDŻ©╚ńłD4-20Ż®Ż╗
▌ö╚ļČ╦╚ĶĪó▌ö│÷▌SĮŪ╦┘Č╚Ū·ŠĆŻ©╚ńłD4-21)┴║╠▐Ż╗
ąĪŚU║═▌SŅi╗¼ęŲ╬╗ęŲŪ·ŠĆŻ©╚ńłD4-22)╬Ķ▒╬Ż╗
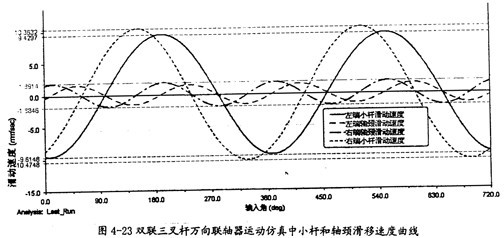
ąĪŚU║═▌SŅi╗¼ęŲ╦┘Č╚Ū·ŠĆŻ©╚ńłD4-23)╚┘▓ĪŻ╗
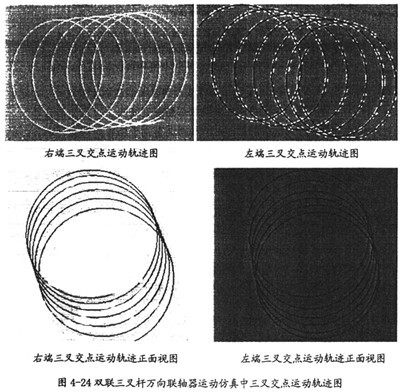
ļp┬ō(li©ón)╚²▓µŚU▌SŅi▌SŠĆĮ╗³c(di©Żn)Ż©║å(ji©Żn)ĘQ╚²▓µĮ╗³c(di©Żn)Ż®Ą─▀\(y©┤n)äė(d©░ng)▄ē█EŻ©╚ńłD4-24Ż®╔°╩┴ĪŻ
4.5.3Ę┬šµĮY(ji©”)╣¹Ęų╬÷
ė╔łD4-19┐╔ęį┐┤│÷Ė÷┼ĶŻ¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌▐D(zhu©Żn)äė(d©░ng)Ą─▀^│╠ųąČõŲ▄Ż¼ųąķgŚU═¼▌ö╚ļ▌S╝š┴┴Īó▌ö│÷▌Sų«ķgĄ─ŖAĮŪČ╝į┌ūā╗»Ż¼Ūęā╔éĆ(g©©)ŖAĮŪĄ─ūā╗»Ą─┤¾ąĪŽÓ▓Ņ║▄┤¾ųš╗¾Ż¼ę╗éĆ(g©©)▌^×ķŲĮ╗¼Ż©”┬=10ĪŃ)ĘąĖ∙Ż¼Č°┴Ē-éĆ(g©©)ätęį▌^┤¾Ą─Ę∙Č╚Ż©18ĪŃŻ®│╩ų▄Ų┌ūā╗»ĄĒ╦ŅŻ¼į┌├┐-éĆ(g©©)╗ž▐D(zhu©Żn)ų▄Ų┌ųąŻ¼╦³Ą─ūā╗»Ņl┬╩×ķl┤╬ū├Ų╠ĪŻ
ė╔łD4-20┐╔ęį┐┤│÷╔óčęŻ¼ųąķgŚU═¼▌ö│÷▌SķgĄ─ŖAĮŪūā╗»ę▓│╩¼F(xi©żn)ę╗Č©Ą─ęÄ(gu©®)┬╔Ż¼į┌├┐-éĆ(g©©)╗ž▐D(zhu©Żn)ų▄Ų┌ųą├╚╩źŻ¼╦³Ą─ūā╗»Ņl┬╩×ķ3┤╬ĪŻĮY(ji©”)║ŽłD4-19Ū„═÷ĪółD4-20┐╔ų¬ųąķgŚU═¼▌ö╚ļ▌S╝░▌ö│÷▌SŖAĮŪĄ─ūā╗»Ņl┬╩╩Ū▓╗-śėĄ─Ż¼▀@╩Ūļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„ėąäeė┌å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─ę╗ĘN╠žąį┼▓ŲõĪŻ

ė╔łD4-21┐╔ęį┐┤│÷Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„═¼å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─▌ö│÷Ū·ŠĆŽÓ╦Ų╩▓▓■Ż¼«ö(d©Īng)▌ö╚ļ▌S▐D(zhu©Żn)╦┘║ŃČ©Ģr(sh©¬)Ų▒▒ļŻ¼▌ö│÷▌S▐D(zhu©Żn)╦┘│╩¼F(xi©żn)ėąęÄ(gu©®)┬╔Ą─▓©äė(d©░ng)Ż¼į┌├┐ę╗éĆ(g©©)╗ž▐D(zhu©Żn)ų▄Ų┌ųą▓╗╩©Ż¼╦³Ą─ūā╗»Ņl┬╩×ķ3┤╬ĮĄų²Ż¼═¼łD3-8ųąĄ─”┬=10ĪŃĢr(sh©¬)Ą─Ū·ŠĆŽÓ▒╚ęĪ┴ŃŻ¼ļp┬ō(li©ón)═¼å╬┬ō(li©ón)Ą─Ūķør▓Ņ▓╗ČÓŻ¼╣╩╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌ļp┬ō(li©ón)Ą─ĮY(ji©”)śŗ(g©░u)ą╬╩ĮŽ┬▌ö│÷▐D(zhu©Żn)╦┘╠žąįų▒ė^╔Ž¤oĖ─╔ŲūżĮ÷ĪŻ

ė╔łD4-22┐╔ęį┐┤│÷Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌▀\(y©┤n)▐D(zhu©Żn)Ą─▀^│╠ųą╬Ē╝ęŻ¼ū¾ėęā╔Č╦Ą─ąĪŚU╗¼ęŲ╬╗ęŲ┴┐Äū║§ŽÓĄ╚┴Õš├Ż¼ū¾ėęā╔Č╦▌SŅiĄ─╗¼ęŲ╬╗ęŲ┴┐ę▓ĮėĮ³Ą╚ųĄąŠ▀ųŻ¼Ūę▌SŅiĄ─╗¼ęŲ╬╗ęŲ┴┐▒╚ąĪŚUčž╗¼Ą└╗¼äė(d©░ng)Ą─╬╗ęŲ┴┐ꬹĪĄ├ČÓŻ¼▀@═¼å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─╠žąį╩ŪŽÓ═¼Ą─ų±ūßĪŻ
ė╔łD4-23┐╔ęį┐┤│÷Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌▀\(y©┤n)▐D(zhu©Żn)Ą─▀^│╠ųąŻ¼ū¾ėęā╔Č╦Ą─ąĪŚU╗¼ęŲ╦┘Č╚Äū║§ŽÓĄ╚┐ąČ╦Ż¼ū¾ėęā╔Č╦▌SŅiĄ─╗¼ęŲ╦┘Č╚ę▓ĮėĮ³Ą╚ųĄ╣č┬ńŻ¼Ūę▌SŅiĄ─╗¼ęŲ╦┘Č╚▒╚ąĪŚUčž╗¼Ą└╗¼ęŲ╦┘Č╚ꬹĪĄ├ČÓ║¼┐┌Ż¼╦³éāĄ─ūā╗»Ņl┬╩═¼å╬┬ō(li©ón)Ģr(sh©¬)Ą─ŪķørŽÓ▒╚ę▓¤oūā╗»Ż¼į┌┤¾ąĪ╔Ž═¼”┬ŻĮ10ĪŃĄ─å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─╠žąį╩ŪŽÓ═¼Ą──ŻųÕĪŻ
ė╔łD4-24┐╔ęį┐┤│÷ŪĪ▒▄Ż¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌▀\(y©┤n)▐D(zhu©Żn)Ą─▀^│╠ųąįļŲčŻ¼ļp┬ō(li©ón)╚²▓µŚUĄ─ū¾ėęā╔Č╦╚²▓µĮ╗³c(di©Żn)Ą─▀\(y©┤n)äė(d©░ng)▄ē█EČ╝│╩┬▌ą²ŠĆūā╗»Ż¼ŪęĘŪ│ŻėąęÄ(gu©®)┬╔Ė▌Ž¶Ż¼╦³éāĄ─š²├µęĢłDŠ∙×ķś╦(bi©Īo)£╩(zh©│n)Ą─łAą∙č╝Ż¼▀@ę╗ĘN╠žąįėąäeė┌å╬┬ō(li©ón)Ą─╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─╠žąįĪŻ▀@ĘNŪķørĄ─│÷¼F(xi©żn)ų„ę¬╩Ūė╔ė┌ųąķgŚUį┌▐D(zhu©Żn)äė(d©░ng)Ą─▀^│╠ųą╩Ūę╗ĘN£╩(zh©│n)łAÕFö[▀\(y©┤n)äė(d©░ng)Ż©ė╔ė┌ųąķgŚU═¼▌ö╚ļ▌S╝░▌ö│÷▌SŖAĮŪūā╗»▓╗ę╗śė─½ŽąŻ¼╚ńłD4-19╦∙╩ŠŻ®,Č°Ūęę“?y©żn)ķŽĄĮy(t©»ng)Ą─ūįė╔Č╚▓╗×ķ0Ż¼ŽĄĮy(t©»ng)īŹ(sh©¬)ļH▀M(j©¼n)ąąĄ─╩Ūäė(d©░ng)┴”Ę┬šµųŻ┐┌Ż¼ė┌╩Ū«a(ch©Żn)╔·┴╦═¼ųąķgŚU▌SŠĆ▓╗┤╣ų▒Ą─ļxą─┴”Ż¼▀@śėį┌ųąķgŚUĄ─▌SŽ“╔ŽŠ═Ģ■(hu©¼)ėąĘų┴┐┼╦ą’Ż¼į┌┤╦Ęų┴”Ą─ū„ė├Ž┬▒žČ©Ģ■(hu©¼)│÷¼F(xi©żn)ųąķgŚUŽ“ę╗Č╦Ą─▀\(y©┤n)äė(d©░ng)ĪŻŻ©ę“?y©żn)ķųąķgŚUį┌▌SŽ“╔Ž┐╔ęįūįė╔▀\(y©┤n)äė(d©░ng)ūąČ߯¼╣╩į┌īŹ(sh©¬)ļHĄ─æ¬(y©®ng)ė├ųąŻ¼╚ń╣¹ųž┴”į┌ųąķgŚUĄ─▌SŽ“╔ŽėąĘų┴┐Ėū═├Ż¼─Ū├┤ųąķgŚUę▓Ģ■(hu©¼)ęŲŽ“ę╗Č╦╚š╚╣ĪŻ▀@śėĄ─Ūķør▓ó▓╗╩Ū╬ęéā╦∙Žļꬥ─Ż¼╦∙ęįꬎļį┌īŹ(sh©¬)ļHųąæ¬(y©®ng)ė├ļp┬ō(li©ón)Ą─╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Š═▒žĒÜī”(du©¼)▀@ĘNĮY(ji©”)śŗ(g©░u)▀M(j©¼n)ąąĖ─▀M(j©¼n)░║Ę„ĪŻŻ®
4.5.4ĮY(ji©”)šō
ė╔ęį╔ŽĘų╬÷┐╔ų¬Ż¼╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„į┌å╬┬ō(li©ón)║═ļp┬ō(li©ón)Ģr(sh©¬)Ą─▀\(y©┤n)äė(d©░ng)╠žąį═ŲĘĒŻ¼į┌ŖAĮŪūā╗»Ą─ęÄ(gu©®)┬╔╔Ž║═╚²▓µĮ╗³c(di©Żn)Ą─▀\(y©┤n)äė(d©░ng)▄ē█E╔ŽėąĖ∙▒ŠąįĄ─Ė─ūāŻ¼Č°į┌▒Šš┬╦∙£y(c©©)įćĄ─Ųõ╦³╠žąįųąÄū║§¤oūā╗»┬Ę╗▒ĪŻ
4.5▒Šš┬ąĪĮY(ji©”)
▒Šš┬ķ_╩╝ĮķĮB┴╦╠ōöMśėÖC(j©®)╝╝ąg(sh©┤)╝░Ųõį┌ėŗ(j©¼)╦ŃÖC(j©®)╔ŽīŹ(sh©¬)¼F(xi©żn)Ą─▄ø╝■ADAMS╚ŁĖšŻ¼▓ó└¹ė├╚²ŠSĮ©─Ż▄ø╝■Pro/E┬ō(li©ón)║ŽADAMS▀M(j©¼n)ąą▀\(y©┤n)äė(d©░ng)Ę┬šµŻ¼į┌“×(y©żn)ūC▀@ĘNĘĮ░Ė┐╔ąąąįĄ─╗∙ĄA(ch©│)╔Ž┐¼╩ūŻ¼Ęųäeī”(du©¼)å╬┬ō(li©ón)╚²▓µŚU╚fŽ“┬ō(li©ón)▌SŲ„║═ļp┬ō(li©ón)╚²▓µŚU╚fŽ“┬ō(li©ón)▌SŲ„▀M(j©¼n)ąą┴╦▀\(y©┤n)äė(d©░ng)Ę┬šµĘų╬÷ĪŻ═©▀^Ęų╬÷Ę²ą┌Īó▒╚▌^ļ²┴┤Ż¼Ą├│÷╚ńŽ┬ĮY(ji©”)šōŻ║
å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─└Ēšō▀\(y©┤n)äė(d©░ng)Ęų╬÷ĮY(ji©”)╣¹═¼Ę┬šµĘų╬÷ĮY(ji©”)╣¹╩Ū╬Ū║ŽĄ─╬ŁŠ∙Ż╗
å╬┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„═¼ļp┬ō(li©ón)╚²▓µŚU╩Į╚fŽ“┬ō(li©ón)▌SŲ„Ą─▀\(y©┤n)äė(d©░ng)ęÄ(gu©®)┬╔ėąĄ─░l(f©Ī)╔·┴╦Ė─ūāųČ┬ėŻ¼ėąĄ─▒Ż│ų▓╗ūāŲ÷░ŠŻ¼╠žäe╩Ū▌ö│÷▌SĄ─▐D(zhu©Żn)╦┘╠žąįį┌ļp┬ō(li©ón)Ģr(sh©¬)═¼å╬┬ō(li©ón)Ģr(sh©¬)Äū║§¤oūā╗»ĪŻ
