����Uʽ�f��(li��n)�S������Փ�\�ӷ���
3.1ǰ��
����Uʽ�f��(li��n)�S����һ�N���͵��f��(li��n)�S�������ڽY���Ϻ����ɳߡ��o�����Ρ����b���㣬���г��d����������ɿ��ȃ�(y��u)�c���̡��ڇ����яV���ر���������܇���I(y��)�������Ĺ��I(y��)�I���ųڡ������������\��Ҏ(gu��)�ɏ��s�����ˏص�Ū���������c�ҽ٣��L���ԁ�һֱ�����ˌ����\�ò�ͬ��Ӌ�㷽���M���\�ӷ�����Ѽ�������\�÷������Ҿ���@һ��(sh��)�W���ߣ�������U����ʽ�f��(li��n)�S���\�әC���M�н���Ӌ�㸲�㣬�ó������\��Ҏ(gu��)�ɱ��_ʽ�������D�̰������ں�����¹�(ji��)���\��ͬ�ӵĽY���M�з�����C���ԙz�Ӌ������_��̲�֡�
3.2����Uʽ�f��(li��n)�S������Փ�\�ӷ���
3.2.1����U����ʽ�f��(li��n)�S������
����U����ʽ�f��(li��n)�S���ɻ��U���S���ַQ��ݔ���S����²������U���ַQ��ݔ���S����С�U�̓����^�ȽM�ɮa���@�ׂ�������ģ�͈D3-1��ʾ��������С�U�̓����^�b��ɻ��U��ģ�͵��b���Pϵ��D3-l���ϲ�����ź�����@�N�B����ʽ�����飬�����^����С�U���D�ӣ����γ����渱���������������D�����ɶ���̡��ڻ��U���S������������ֲ��Ŀף�С�U�Ļ��������c���b������U�S�i�ϵĻ��U�����й�����@�����е���Ͼ����g϶�����ö��������U�f��(li��n)�S���\�D�r�����S�ЊA�ǣ������Uһ�����ػ��������ľ��Ƅ��ģ���һ����������U�S�i�Ƅ�·�����Ķ����F(xi��n)�\���^���еĽǶ��a����
3.2.2����ģ�͵Ľ���
�����\��Ҏ(gu��)�ɵ���������������ˌ��F(xi��n)�����\����ذ������(li��n)������Uʽ�f��(li��n)�S����Ҫ��ݔ���S�ϰ��b�{���S�У��{���S�е�ģ���b���Pϵ��D3-1��ʾ�����ă�Ȧͬ����U�o�������ӣ�����t������Փ���Dz������D�ӵģ����ɶȲ�����ŭ�����b�ϙC�ܣ�����֧�У���D3-1)���ݣ��͘���������U����ʽ�f��(li��n)�S�����b��ģ�ͺ��塣��ģ����D3-2��ʾ��
ͨ�^���D3-2�е�ģ���M�г���������ɵõ�����U����ʽ�f��(li��n)�S���ęC���\�Ӻ��D��������ʾ��D��D3-3��ʾ���ڴ�ģ�����P��(ji��)�S������ͬ����U���S�i�S���Ľ��c���xһֱ��׃Żͯ������ǰ�ķ�����֪��ʣ����@�Nģ���У�����U���ĵ��\��܉�E��ݔ���Sƽ���������\�ӕr����

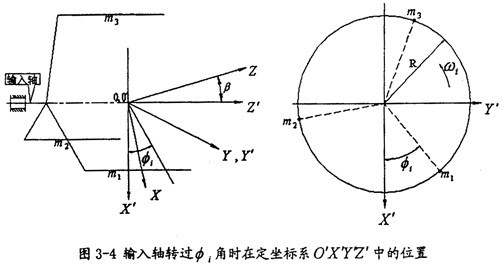
��돽�ĈA���ǣ�����R��ݔ���S�����S������㡣ݔ���S�S���ľ��x���D3-4������ʾ�⣩����ݔ��������ݔ�����S��֮�g�ĊA�ǣ��D3-5������ʾ�⣩,L��A�F�[���S���L���ҡ����Բ����{���S�а��bݔ���S�r��ݔ���S���\�ӱ؞�һ�A�F�[�\�Ӻ���������U���ĵ�ƫ�ľ�P��ֵ

���P���ѡ���L��o�F��r��

,�@�r�ஔ�����p�����S�а��bݔ���S�����S��

����L
P��Ӌ��ֵ�c���Hֵ�������F(xi��n)С���`�������������`��OС��������һ�㑪�È��Ͽ���ȡP��

��

��
�������D�ӵ��^�����ճ����U���c�����D�\�ӷ�������˕�����ݔ���S�cݔ���S֮�g�ĊA�ǰl(f��)��׃���庬����׃���������min����max����O�c��Ҋ�D3-5��̎��ݔ���S�cݔ���S�D���F���ľ�������ƽ��ăɂ��O��λ�Õr�Ȼ磬ƫ�D���_���ɘOֵ:
������λ�Õr��ƫ�D�ǽ��ڃ���֮�gƪ�š�
3.2.3����ϵ�Ľ���
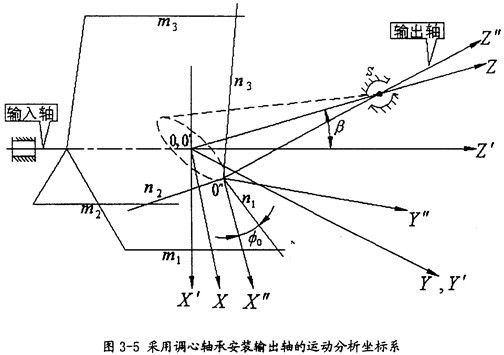
����ݔ���S��һ�A�F�\�ӿ�˱���ڷ������^�����轨����������ϵ����D3-5��ʾ�Ͳ䡣
���Ƚ����ɂ��̶�����ϵOXYZ��O��X��Y��Z�仩����ݔ���S�D���F���ľ�ȡ���SOZ��ݔ���S���S��ȡ��O��Z���������O�cO���؞�oZ�cO��Z�佻�c��Σ��ȡ�SOY�cO��Y���غϣ��Ҵ�ֱ���γɊA�Ǧµ�OZ��O��Z����S����ƽ����Ų���t����ϵO��X��Y��Z��ɿ���������ϵOXYZ�@OY�S���Dһ���ǶȰ���������ݔ���cݔ��֮�g�ĊA�Ǧ����á������ˣ�������U�Ϲ��Bһ������ϵO��X��Y��Z��������ԭ�cO�弴������U�Ľ��c��O��Z�弴�錍�Hݔ���S�S�����룬O��X��Y��ƽ�漴������U����ƽ�淹������ȡ�SO��Y��ʼ�K��ֱ��OX�S����������ϵO��X��Y��Z��Ҳ�S����U���A�F�\�ӣ����ٶ��ڳ�ʼ��B(t��i)�¾��ף������S��m
1λ��O��X��Z��ƽ��Ȳ��٣�����U�S��n
1λ���c�̶�ƽ��OXZ�غϵĄ�ƽ��o��X��Z��ȣ���ݔ���S�D�^һ�Ƕ�

�r³�ţ�ݔ���S������U�D�^

��,����ݔ���S�D�^��

�r��ɻ��������ϵO��X��Y��Z����λ����D3-4��ʾ���D3-4���҈D����ҕ�D��w
i��ݔ���D�٣�����@�ӽ�������ϵ��Ȱ�����Ϳ������������R�����˵ķ������Ҿ�ꇡ������A׃�Q����M���\�ӷ���ķ����ˡ�
3.2.4�\�ӷ���
���D3-5��ʾ����ϵ����������ڄ�����ϵO��X��Y��Z���н�������U�S�i���S������(sh��)����Ȼ��ͨ�^����׃�Q�D���̶�����ϵO��X��Y��Z���н�����ݔ���S�Ļ����S��ͬ����U�S�i���S���ཻ����С�U��������ģ�����������ϵO��X��Y��Z����(li��n)������U�S�i���S������(sh��)���̺�ݔ���S�Ļ����S������(sh��)����ײߴ�����@��(li��n)���ķ����Е����F(xi��n)�ɂ�δ֪����ݔ���D��

�̈́�����ϵ�е�һ������x�����ɣ����̔�(sh��)��δ֪����(sh��)����ͬ�ģ�����������£�ͨ�^�����˼������
ͬ
���Pϵ��ӯ��ͬ�rС�U����������ڹ̶�����ϵO��X��Y��Z���е��\��܉�EҲ�������Զ��
3.2.4.1(li��n)�����̵���ȡ
�ɽ���������ϵ��֪��
�ڶ�����ϵO��X��Y��Z����ݔ���S���������S��m1��m2���ȡ�m3���̞飺
�ڄ�����ϵO��X��Y��Z��������U�S�i���S��n1˥����n2��n3���̞飺
������ϵO��X��Y��Z���c������ϵOXYZ֮�g�����A׃�Q��ꇞ飺
����ӑՓ����ڹ̶�����ϵO��X��Y��Z���б��_������U�S���ą���(sh��)���̼�����
������@������(sh��)������յ���҂���횽�Q������ϵO��X��Y��Z��ͬ������ϵOXYZ֮�g������׃�Q���[Moo��]��
��֪O���c��OXYZ�е����˞飺
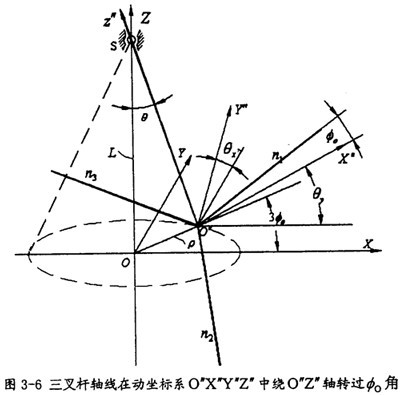
���ڄ�����ϵO��X��Y��Z���O��Y���Sȡ��ʼ�K��ֱ�ڹ̶�����ϵOX�Sǫѡ�����J���Ȱ�OXYZ����ϵ�@OX�S�D�^�A�Ǧ�z����ʹOY�S�cO��Y���Sƽ�У����@�µ�OY�S�D�^��yͶ�̣�ʹOX�S�cO��X���Sƽ�к�����OZ�SҲͬ�rƽ����O��Z���S��׃�Q���gλ����D3-6��ʾ�����t�̶�����OXYZ�c������ϵ�g��׃�Q�Pϵ���£�
������
��O��Z���cOZ�Ľ��cS��OXYZ����ϵ�е����˞飨Oӫ�أ�O���ȣ�L������O��X��Y��Z������ϵ�е����˞飨O���O

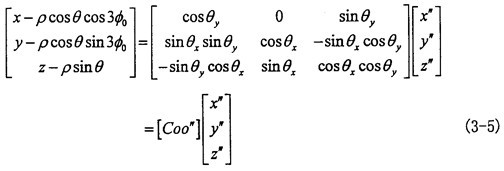
�����Σ�����ʽ��3-5��
���Ƴ���
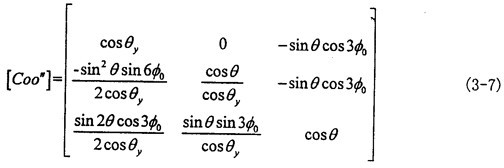
��ʽ��3-6����֪|��y|<�ȣ�|��x|<��һ����f��ֵ�dz�С̴�죬�t��y�ͦ�x�t��С�ؾ������˷������Ҿ��[Coo��]������헾������������w����ʽ���£��麆����������y������֪����(sh��)���룩��
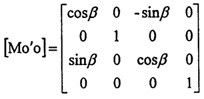
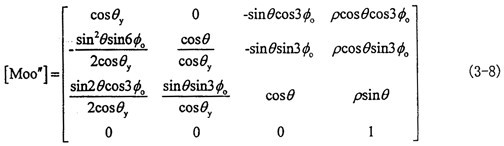
���DŽ�����ϵO��X��Y��Z���c������ϵOXYZ֮�g�����A׃�Q���[Moo��]�飺
����tg��=

���ѣ���L��A�F�[���S���L��֦��P��A�F�[�A�돽��Ҋ�D3-3����
������ϵO��X��Y��Z���c����ϵO��X��Y��Z��֮�g�����A׃�Q��ꇞ飺
[Mo��o��]=[Mo��o] [Moo��]
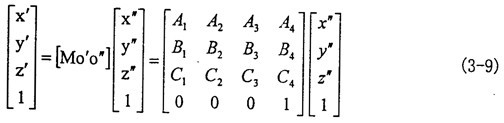
������U�S�i���S������������ϵO��X��Y��Z���D������ϵO��X��Y��Z��飺
��3-7��ʽ��A1��A2��桢A3У�ࡢA4��B1Ͳ����B2������B3��B4��Ҩ��C1���ᡢC2��C3������C4�������ھ��[Mo��o��]�Ќ���λ�õı��_ʽ�ҹ롣
��ʽ��3-3��ͬʽ��3-9��ʽ(li��n)�����t�У�
3.2.4.2ݔ��֪����ݔ���D���Pϵ����ȡ
��ʽ��3-1o���еģ�1����ƶ����2����ʽ�Ͽˣ���ȥx�壬�������ݔ��� ͬݔ���� ��
�Pϵ���ˡ�

��3-11��
��ʽ(3-11)����ȥsin�ȵ�ƽ���ߴ�헣�����(j��)���H��rp«L���գ��ʦ�Ҳ�dz�С��ϥ�࣬ͬ�r��cos��
y��1����ʽ��3-6����֪�Ǻ����ģ�ͷλ���t�ɵó�ݔ��ͬݔ���D���Pϵ��
�D���Pϵ��

��3-12��
�ٱ��Pϵ��

����λ�黡��/�룩 ��3-13��
3.2.4.3С�U���\�ӷ���
3.2.4.3.1С�U�����ڻ������\��
��ʽ��3-1o���еĵڣ�3��ʽ������̎��sin�ȡ�

��o��cos�ȡ�1�����H��p<<L,����̎���Ǻ����ģ�����t�ɵõ���С�U����������P�ڹ̶�����ϵo��X��Y��Z���е��\��܉�E��
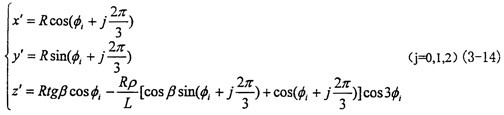
��ʽ��3-14���t��С�U�ڻ����еĻ���λ�Ƽ�������z��ֵ��������С�U�Ļ���λ������ͬ�����ã���ȡ����֮һ�M�б�ʾ�ް�����h1����λ�����t�ɱ�ʾ�飺

С�U��������P�ڶ�����ϵo��X��Y��Z���е����ˣ�X��Y��Z�䣩��ʾ��������ʽ�飺

=��x�䣬y��������z�䣩���������䌦�r�gt�õ���

���tP�c�Ľ^���ٶȞ�v
p=
���档���У�
��ʽ����

��̎��������Uʽ�f��(li��n)�S��ݔ��ͬݔ�����D�Dz�ֵ��С���ᣬ�����J���ǵȽ��ق��ӣ��@�ں���ķ����п����C���ۺ�����

=v
pz��С�U���������������ٶȻ��ģ����ٶ�

�ٴΌ��r�gt�ɵ�С�U�\�ӵļ��ٶȣ�

������

=a
pz��С�U�����������������ٶȣ���
���Oݔ���S���D�ٞ鶨ֵ��ӿ���t

ͨ�����˕r��
3.2.4.3.2 С�U����������P������������U�S�i���\��С�U����������P�ڄ�����ϵO��X��Y��Z���еą���(sh��)���̞飺
��������h
j��С�U����������P������U�S���ľ��x�������С�U�\����ͬ���ڣ���ȡ����֮һ�������࣬����j=o)
����3-17)ʽ���루3-1o��ʽ�еڣ�2�������̿ɵ�
Rsin

=B
1h
ocos

+B
2h
osin
+B
4��

=
��cos�ȡ�1���sin�ȡ�o�t�ɵó�С�U��������P��������U�S�i����λ�����飺
h
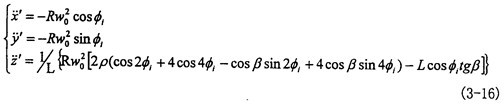
o=R-P-2Pcos2
��3-18��
��λ��ho���r�gt�ɵ�С�U��������P������U�S�i�������ٶȣ�

��3-19��
���ٶ�

�ٴΌ��r�gt�ɵ�С�U��������P������U�S�i���������ٶȣ�

��3-2o��
3.2.5�Y������
���҂��Mһ�����������x�������¸�����
ݔ��Ҹ����ݔ���D�Dz�ֵ

ͬݔ�롢ݔ�����ٶȱ�ֵ

�Sݔ��Ǻ̓��S�A�ǵ�׃����r�߹֣�
С�U�ػ����\�ӵ�λ��h
1���㡢�ٶ�v
Pz�ͼ��ٶ�a
pz�Sݔ��Ǻ̓��S�A�ǵ�׃����r��
С�U����������P������U�S�i�\�ӵ�λ��h
o��ź���ٶ�

�ͼ��ٶ�

�Sݔ��Ǻ̓��S�A�ǵ�׃����rʸ�ܣ�
���L�������ڲ�ͬ���S�A�Ǧ����Sݔ���S�D�� ��׃�������D���Ա��M��ֱ�^�ķ�����о��
���OR=37mmҦ�٣�L=14o.5mm��������
i=9o

������ʹ��Փ�����Y��ͬ����ԇ�ĽY�����C���@��ijߴ� ���\�Ӆ���(sh��)���xȡ���H�Ͼ��Ƿ������õ��Ĕ�(sh��)�֣�͵�����L�����ϱ��Pע���Sݔ���S���D���ܵ������D���ߣ��քe��D3-7���D3-8���ݡ��D3-9˺�ꡢ�D3-1o���D3-11��⡢�D3-12���D3-13�͈D3-14��ʾ��
�����ό��������D�ķ���ʳ�꣬����֪������U�f��(li��n)�S����һ���ij̶��Ͽ����J����һ�N�Ƚ���(li��n)�S�����ģ����ĸ����\�Ӆ�����һ�㶼�S���S�A�Ǧµ������������ߣ��е�߀׃���^�����죬�ʲ��m�����ڴ�A�ǵĹ��r�¹�����
3.3�����Y
ͨ�^�������{���S�а��b���r������U����ʽ�f��(li��n)�S��ģ��üʬ���������m���\��ģ�ͺ�����ϵ���ϣ������R�����˵ķ������Ҿ�ꇡ������A׃�Q��ꇣ�������U����ʽ�f��(li��n)�S���M���\�ӷ����뻫���õ������������λ��ù�����ٶȺͼ��ٶȱ��_ʽ��׃�������������������M���˷���η�����ó�����һ�N�ʵȽ���(li��n)�S����ִ���鱾�ĺ��m(x��)�ķ�����C���Ժ�Ą��������ṩ�˻��A��
�������D�ķ�����
�������D3-7���Կ������S���D�Dz��ஔС�������ʹ�ڃ��S�A���_��2oo�r�ڣ�ݔ��ͬݔ��������D�Dz�Ҳ����o.1o��������һ���ij̶����J��ݔ����š�ݔ���D����ͬ����һ���ĵ������������D���S���S�A�Ǧµ����������׃�����l�ʞ�һ�����D����3�����١�
�������D3-8���Կ���̶�ϣ���ݔ���S�D�ٺ㶨��9oo/s�r��ݔ���S���D��׃��Ҳ���ஔ?sh��)�ƽ����棬��ʹ�ڃ��S�A���_��2o��r����������ٶ�׃�������ֵҲ�H��o.4 o��s��������һ���ij̶��Ͽ����J���@�N(li��n)�S����һ�N�Ƚ���(li��n)�S�������ٶȵ�׃���l�ʞ�һ�����D����3��Ѣ������һ�����D���ڃ���ȫ�����c������ǣ�֡��ҽ��ٶȲ��S���S�A�Ǧµ����������
�������D3-9���Կ�����ȣ�С�U�ػ�����λ���S���S�A�Ǧµ������������׃����Ҳ���^��׃���l�ʞ�һ�����D����1�����ס��@������������U�f��(li��n)�S���OӋ�в°磬С�U�L�ȵ��OӋ����(j��)��
�������D3-1o���Կ���������С�U��������P���S�iλ�����Գߴ�R��ؚw������Ӯ���S���S�A�Ǧµ�����������^׃���ķ������Ǻܴ��̣��ڃ��S�A���_��2o��r��������׃����Ҳ����5mm�����С�U�ػ�����λ������ֵҪС�ö༯�����׃���l�ʞ�һ�����D����2�Ρ�
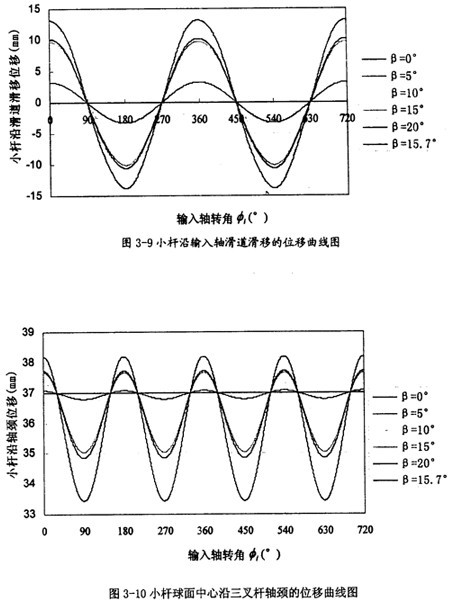
�������D3-11���Կ������С�U�ػ������\���ٶ�Ҳ���������Թ��̣�����׃���l�ʞ�һ�����D����1�Ρ�����ͬ���Ҿ���һ�c�������ʣ������²����Q���أ��S���S�A�DZR�����������ֵ���L�^�죬�@һ��(sh��)ֵ�����������������Ħ��Ӌ�����Ҫ����(j��)�龥��
�������D3-12���Կ������ԣ�С�U��������P���S�i�ľ��ٶ��S���S�A�Ǧµ����������ֵ���LҲ�^�죬����׃���l�ʞ�һ�����D����2�����壬���������Q�@һ��(sh��)ֵ�����������������Ħ��Ӌ�����Ҫ����(j��)̬�
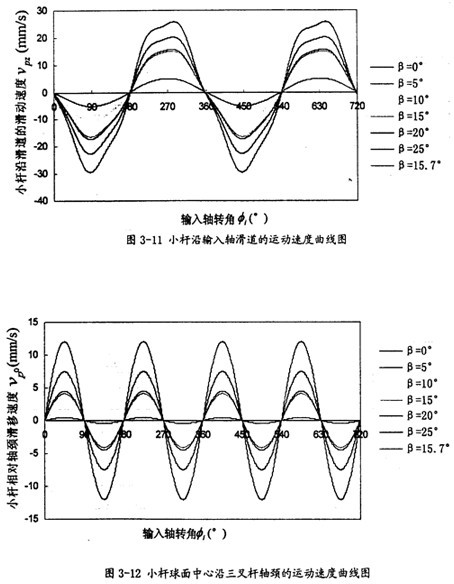
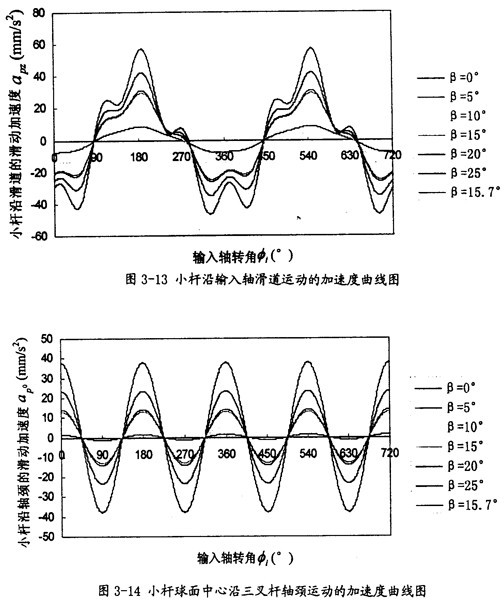
�������D3-13���Կ�����С�U�ػ������\�Ӽ��ٶ���׃���^����s��˪��׃��������������ä��׃���l�ʞ�һ�����D����1�Ρ��S���S�A�Ǧµ����������ֵ���L�^����Ԩ������ֵ������������������OӋӋ�����Ҫ����(j��)���ҡ�
�������D3-14���Կ�����С�U��������P���S�i�ľ����ٶ�ʲ�죬׃���l�ʞ�һ�����D����2�ΰ������S���S�A�Ǧµ����������ֵ���L�^�죬����ֵ������������������OӋӋ�����Ҫ����(j��)��ѱ��