�Ƚ����f(w��n)��(li��n)�S����Փ
2.1����
�Ƚ����f(w��n)��(li��n)�S���C(j��)��(g��u)�İl(f��)������(y��ng)���_(k��i)�����f(w��n)��(li��n)�S�����_(k��i)�l(f��)�͑�(y��ng)�õč��r(sh��)��ֺʼ����Ҳ���f(w��n)��(li��n)�S���Ƚ����\(y��n)��(d��ng)�Ļ��A(ch��)���`����ᡣ��(du��)���Ą�(chu��ng)����ζ���п��ܰl(f��)�������͵ĵȽ����f(w��n)��(li��n)�S�����о����x�ش����ѣ��f(w��n)��(li��n)�S���C(j��)��(g��u)�Ƚ��ق���(d��ng)����Փ�о����Ҳ�ɞ�ԓ�I(l��ng)��һ��(g��)��Ҫ���о��n�}���ꡣ
��(sh��)�F(xi��n)�Ƚ��ق���(d��ng)���ӣ������ж�N��ʽ�ɿ����ø߸��C(j��)��(g��u)Ҳ�����õ��C(j��)��(g��u)���ң������ڃ��S�g�ö���(g��)��(g��u)��Ҳ�����Æ�һ��(g��u)�����������B�UҲ�����ÝL�ӻ������Π�Ę�(g��u)�����ԡ����������@Щ��ͬ����ʽ���ᣬͨ�^(gu��)���ݻ��͕�(hu��)�a(ch��n)������ġ�ǧ׃?n��i)f���ĵȽ��ٙC(j��)��(g��u)���ġ��@Ҳ�ǵȽ�����Փ��(f��)�s��ԭ�����ڽ��ˡ�
���ĵȽ��ٻ��D(zhu��n)�B�U�C(j��)��(g��u)���֣��Ԍ�(sh��)�H�ĎN���͵Ƚ��ٮa(ch��n)Ʒ������������(du��)��ͬ�ĵȽ�����Փ�M(j��n)����Փ�ƌ�(d��o)�ٱߣ������;C�ϣ��o����������ͬ���m�÷��������������͵Ƚ���(li��n)�S���C(j��)��(g��u)�İl(f��)�F(xi��n)�ṩ��Ҫ����Փ���A(ch��)ע����
2.2�Ƚ��ٻ��D(zhu��n)�B�U�C(j��)��(g��u)̽ӑ
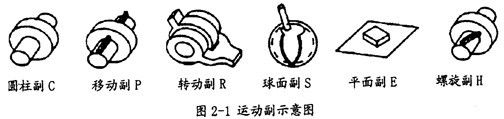
�ڵȽ����f(w��n)��(li��n)�S���У��ֶ������B�U�C(j��)��(g��u)������ϵ��p(li��n)ʮ���S�f(w��n)��(li��n)�S���C(j��)��(g��u)�����������B�U�C(j��)��(g��u)���¡��Ĵ����IJ�ͬ�ęC(j��)��(g��u)�C���й�ʣ��п��ܵó���N��(sh��)�õĵȽ����B�U�C(j��)��(g��u)�������о��Ƚ�����Փ������B�U�C(j��)��(g��u)����ʽ�ͳ߶��P(gu��n)ϵ�錦(du��)�����磬�M(j��n)���µĵȽ�����Փ��̽������һ�������x���ǿ��е�ɽ�ϡ��ڙC(j��)��(g��u)�W(xu��)��ΰ�٣���(g��u)��ͬ��(g��u)���g���B�ӷQ(ch��ng)�鸱���䲻ͬ����ʽ�ʹ�̖(h��o)��D2-1��ʾ��
2.2.1�Ƚ��ٻ��D(zhu��n)�B�U�C(j��)��(g��u)
�Ƚ��ٻ��D(zhu��n)�B�U�C(j��)��(g��u)����������λ���S�g�ĵȽ��ق���(d��ng)���⣬���ཻ�S���硢���e(cu��)�S��interlaced shaft����ƽ���S���ˡ��c�X݆�C(j��)��(g��u)����簩����һ����И�(g��u)����(ji��n)�Ρ��������졢����(d��ng)���ȸ߶�ī����ĥ�p�ȃ�(y��u)�c(di��n)���Ѷ��F(xi��n)�ѱ��V����(y��ng)������܇(ch��)��܈䓙C(j��)���O(sh��)����p(li��n)ʮ���S�f(w��n)��(li��n)�S���ڹ¡�ʮ�ֻ��K(li��n)�S���șC(j��)��(g��u)���������������
�Ƚ��ٻ��D(zhu��n)�B�U�C(j��)��(g��u)�������g�C(j��)��(g��u)�������^���y��ӱ����߶ȼs���P(gu��n)ϵʽ�^��(f��)�s����(du��)�����о���ƪ��ֻ��ijЩ��������ή�ӣ�Ŀǰ�҇�(gu��)�еČW(xu��)�����û����Ļ��D(zhu��n)�C(j��)��(g��u)�Ƚ�����Փ����l(f��)�c(di��n)�����ÙC(j��)��(g��u)�W(xu��)�����ݻ����\(y��n)��(d��ng)术B�ӵȷ����ó��˶�N���еȽ������ԵęC(j��)��(g��u)����������Փ�ͷ������£�
���A(ch��)��Փ��
��һ��(g��)�C(j��)��(g��u)���\(y��n)�D(zhu��n)�r(sh��)��λ��ʼ�K�������S���ǣ�ݔ���S��ݔ���S֮�g�ĊA�ǣ��Ľ�ƽ������R��Č�(du��)�Q(ch��ng)��Ű�����tԓ�C(j��)��(g��u)�����еȽ����ԡ��@Ȼ���ۣ��\(y��n)��(d��ng)���c��(g��u)������(du��)�Q(ch��ng)�������R���Һ������g���Ć����ɶ��R��C(j��)��(g��u)���@�(l��i)�C(j��)��(g��u)�Ļ�����ʽ��Ҭ�����\(y��n)��(d��ng)�����ǣ����g�\(y��n)��(d��ng)��ʼ�K���R���(n��i)��ƽ���\(y��n)��(d��ng)���ʡ��@һ��Փֱ�^���U����һ���ཻ�S���桢���e(cu��)�S�Ƚ����B�U�C(j��)��(g��u)�Ļ�����ʽ��
�R��C(j��)��(g��u)�����g�\(y��n)��(d��ng)����(y��ng)ʼ�K���R���(n��i)��ƽ���\(y��n)��(d��ng)ֶ̾���ɼ��똋(g��u)�����g�\(y��n)��(d��ng)���ăɘ�(g��u)���քe�c�R�昋(g��u)�ɼ���ƽ�渱���γ��˃ɂ�(g��)��(du��)�Q(ch��ng)���R��ļ���C(j��)��(g��u)�������Q(ch��ng)�˼���C(j��)��(g��u)�顰�����(li��n)�S���C(j��)��(g��u)����
���õķ�����
��(du��)�������Ć����ɶ��R��C(j��)��(g��u)ֺ�������ˡ������(li��n)�S���C(j��)��(g��u)���ĸ����(l��i)�U��һ���ཻ�S��ס����e(cu��)�S�Ƚ��ق���(d��ng)�B�U�C(j��)��(g��u)�Ę�(g��u)����ʽ���Ķ���ͨ��ʮ�ַ��y�ĵȽ��ٶ��U���g�C(j��)��(g��u)�߶��P(gu��n)ϵ���о���ǿ����(ji��n)���顰�����(li��n)�S����(li��n)�S���C(j��)��(g��u)�����l�����о����(y��ng)���o��ƽ�ⷨ�M(j��n)����⣬���ó��������������ڵėl���ͷ��Ҳ�͵õ��˴˙C(j��)��(g��u)�Ƚ��ٻ��D(zhu��n)�ij߶ȼs���P(gu��n)ϵʽ��ʢ��
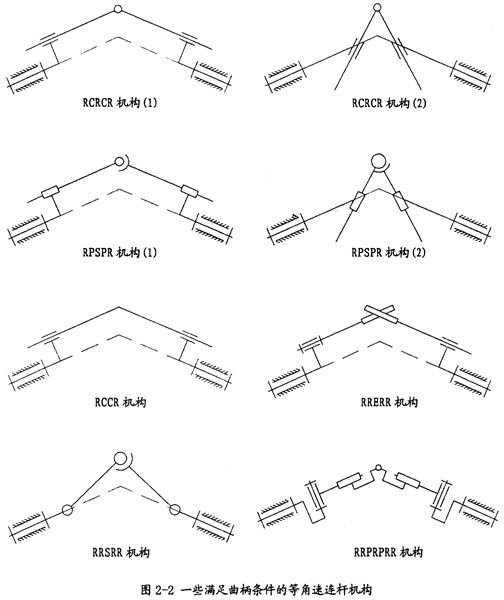
ͨ�^(gu��)�����ķ��������Եõ��ཻ�S���졢���e(cu��)�S��ʽ�Ķ�N�Ƚ����B�U�C(j��)��(g��u)ǯ�ᡣ�ڈD2-2���г������е�һ���֣����������ཻ�S����(d��ng)����ʽ¸Ʒ����(d��ng)Ȼȫ�����R��C(j��)��(g��u)�渹�����@Щ�C(j��)��(g��u)���е��ѱ���(y��ng)���ڵȽ���(li��n)�S���ϣ������q����ʽ�f(w��n)��(li��n)�S��������RPSPR�C(j��)��(g��u)����A(ch��)���ڈD2-3���г������е�һ�N�^��Ҫ�Ľ��e(cu��)�S��ʽ�ĵȽ����B�U�C(j��)��(g��u)ˢ�ѡ�
�ڈD2-3��ʾ��RCRCR�R�潻�e(cu��)�S�Ƚ����B�U�C(j��)��(g��u)��Ʈ����Ҫ���C�@�N�C(j��)��(g��u)�����p��������횝M���S���l�����ܣ��D����ʾ�ļtɫ�ߴ�ֵd���ֻ�����е�һ��(g��)�˺Σ����@һ�s���P(gu��n)ϵ���Ϳ��Կ������ϣ��ڵȽ��ٙC(j��)��(g��u)��Ҫ��(sh��)�F(xi��n)�C(j��)��(g��u)�ĵȽ������ܼ��ף�������Ҫ�M��C(j��)е�и���(g��u)���������Π�ߴ磬����ҲҪ�M�㘋(g��u)���g������gλ���P(gu��n)ϵ���ڡ��b�ڈD2-3����ʾ�Ŀ��gλ�ñ��_(d��)������ѧ�裬���L���������b��ģ�͈D�͙C(j��)��(g��u)�ĸ����ģ�͈D���քe��D2-4���Ρ��D2-5��ʾ������
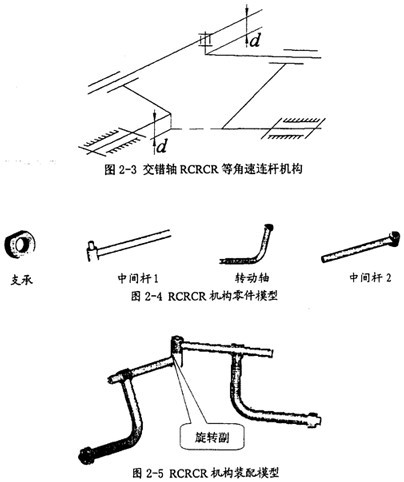
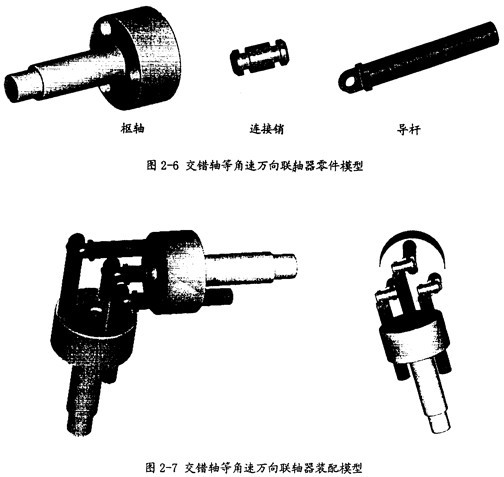
���ÈD2-5�еęC(j��)��(g��u)��ʽ�������ڿ��g���M(j��n)�ДU(ku��)չ̧�������ɵõ�һ�N�dz��Ѓr(ji��)ֵ�ĵȽ����f(w��n)��(li��n)�S������RCRCR���e(cu��)�S�Ƚ����f(w��n)��(li��n)�S���������ڈD2-6ʾ���˴˷N(li��n)�S���ĽM�����ģ�ͣ��ڈD2-7��ʾ���˴˷N(li��n)�S�����b��ģ�ͻ𱾣��������҃ɈD�քe�ǏIJ�ͬ��ҕ�ǵõ���ҕ�DΣ�ӡ��@�N(li��n)�S���ڹ������܌�(sh��)�F(xi��n)���g���e(cu��)�S����(d��ng)��������Ҫ���c(di��n)�ǣ����Y(ji��)��(g��u)���֣���ĥ�p�Ժý��ͣ���(g��u)���Π(ji��n)�Σ������������У����S��(li��n)�ӵăɽ��e(cu��)�S��ƫ�ƽ�׃��(d��ng)�����ϣ���������ֱ�ǽ��e(cu��)����(d��ng)�������]��(g��u)���g����r(sh��)����
2.2.2�Ƚ����B�U�C(j��)��(g��u)���(y��n)�C
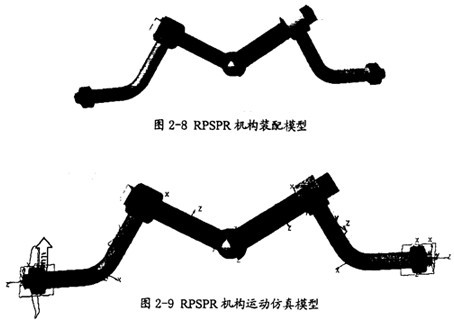
��������Փ�����R��C(j��)��(g��u)����(j��)�F(xi��n)�е���Փ�ǵȽ��ٶșC(j��)��(g��u)���Ļ��A(ch��)����ƣ����������l����ĺ���õ��C(j��)��(g��u)�Ƚ����\(y��n)��(d��ng)�ijߌ��s���P(gu��n)ϵʽ�������(y��n)�C�@һ�����Ŀ�����������������������RPSPRƽ���ཻ�Sģ�ͣ���D2-8��ʾ���������@��(g��)ģ�͵ĽY(ji��)��(g��u)����δ��ȫ��(du��)�Q(ch��ng)���ɂ�(g��)�Ƅ�(d��ng)�������渱�ľ��x��ͬ����
2.2.2.1����ģ�͵Ľ���
�ڈD2-8��ʾģ�͵Ļ��A(ch��)�ϰ��ڣ�ͨ�^(gu��)�ڸ���(g��u)���g�����\(y��n)��(d��ng)�����������\(y��n)��(d��ng)����ʩ���\(y��n)��(d��ng)�(q��)��(d��ng)�����ɵõ��˙C(j��)��(g��u)���\(y��n)��(d��ng)����ģ�ͣ���D2-9��ʾ���Ҷڡ��ڴ�ģ�͵Ľ����^(gu��)���Ї�(y��n)���C����(g��u)���Ĺ������������\(y��n)��(d��ng)������ʽͬ�D2-2�е�RPSPR�C(j��)��(g��u)����ͬŸ�㡣�@���ڴ�ģ������4��(g��)��(g��u)���������C(j��)�ܣ�����2��(g��)���D(zhu��n)�����ˡ���2��(g��)�Ƅ�(d��ng)�����ʡ���l(w��i)��(g��)���渱��ģ����l(w��i)��(g��)���ɶ���½���ټ���l��(g��)�\(y��n)��(d��ng)�(q��)��(d��ng)���ɵõ������ķ���ģ����ġ����^(gu��)��ģ�Ͳ����M���R��C(j��)��(g��u)�ėl����
2.2.2.2����Y(ji��)������
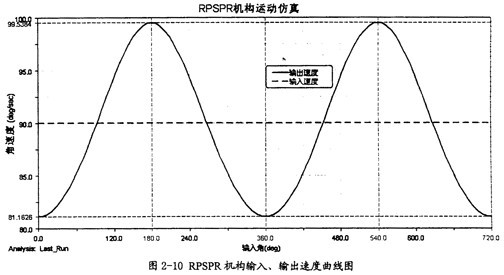
��(du��)ģ���M(j��n)���\(y��n)��(d��ng)���������������ݔ����ģ�͵�ݔ���ݔ�����ٶȵĜy(c��)����������D2-10��ʾ����ν��
�ڴ˷����й�ݔ���˴�ģ���\(y��n)��(d��ng)���ܵ��������@�C����ģ�����p�����϶�������У���ǰ�����Փ��ձ������C(j��)��(g��u)���R��C(j��)��(g��u)����ݔ���D(zhu��n)�ٺ㶨����r�¹�Ť���tݔ���D(zhu��n)�پ��Ǻ㶨�ģ��ڈD2-10����������ݔ���D(zhu��n)�ٺ㶨��90��/s�r(sh��)��ɫ����ݔ���D(zhu��n)��������׃���ġ����(l��i)��(j��ng)ģ���Ļ�ˣ����ԭģ�Ğ���ȫ��(du��)�Q(ch��ng)�Y(ji��)��(g��u)���棬�M���R��C(j��)��(g��u)�ėl���������M(j��n)�з����������ó��ĽY(ji��)����ݔ���D(zhu��n)��ͬݔ���D(zhu��n)����ȫ���̲�����@�����������f(shu��)����ǰ����Փ�����_�ԣ�ͬ�r(sh��)Ҳ�f(shu��)��Ҫ��õ��Ƚ��ق���(d��ng)������һ����(ji��n)�ε��°��ҡ����^(gu��)�����C��ֻ�nj�(du��)һ�N��ʽ�C(j��)��(g��u)���Բ۶������P(gu��n)�����ęC(j��)��(g��u)��ʽ��߀��Ҫ�M(j��n)һ����̽�����ʡ�
2.2.3�Ƚ��ٻ��D(zhu��n)�B�U�C(j��)��(g��u)�Y(ji��)Փ
������ķ�����֪���ܣ���(du��)�ڷ��R�挦(du��)�Q(ch��ng)��RPSPR�C(j��)��(g��u)�������ܾ��еȽ��ٻ��D(zhu��n)���������ݡ�
���еęC(j��)��(g��u)��Ĺ֦���B�U�C(j��)��(g��u)�Hռһ���֣��R��C(j��)��(g��u)�փHռ�B�U�C(j��)��(g��u)��һ������������ʹ�҂��C����������Փ�����_�����ң����о��ă�(n��i)��Ҳ�Hռ����(g��)�C(j��)��(g��u)�ĺ�С��һ���֣��@�������Փ߀�ܲ�������ŵ����Ҫ�M(j��n)һ�����о���϶��
2.3�Ƚ����f(w��n)��(li��n)�S������Փ���a(ch��n)Ʒ
�P(gu��n)�ڵȽ����f(w��n)��(li��n)�S����Ŀǰ���γ������N��Փ;�죬�ʹ��������P(gu��n)�a(ch��n)Ʒ���ф�(chu��ng)���ĵȽ���(li��n)�S���ĵȽ��ق���(d��ng)��Փ���£�
�pʮ���S�f(w��n)��(li��n)�S����(sh��)�F(xi��n)�Ƚ��ق���(d��ng)����Փ���
�����c(di��n)λ�ڃ��S����ƽ�����(n��i)�ĵȽ��ق���(d��ng)��Փ������ʽ��Փ��ӱ��
˲�r(sh��)����(d��ng)�����D(zhu��n)��(d��ng)�S��Փ���Ƕ���ʽ��Փ����
2.3.1�p(li��n)ʮ���S�Ƚ��ق���(d��ng)��Փ����a(ch��n)Ʒ
2.3.1.1�p(li��n)ʮ���S�Ƚ��ق���(d��ng)��Փ
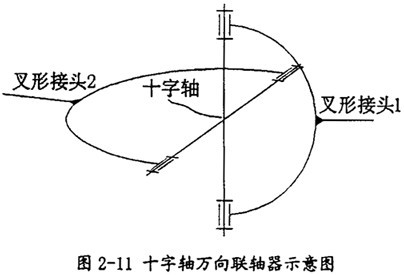
ʮ���S�f(w��n)��(li��n)�S���Ļ����Y(ji��)��(g��u)��D2-11��ʾúȹ�������Ƀɂ�(g��)���S�ϵIJ��ν��^1���ꡢ2��һ��(g��)ʮ���S�M�ɣ���?y��n)���ν��^��ʮ���S���q�ӵ����飬������S��(li��n)�Ӄ��S���^��Ľ�ƫб��������S����ͬһ�S���ϕr(sh��)������(d��ng)�S�����\(y��n)��(d��ng)�⺲���Ą�(d��ng)�S����ijһ������(n��i)�����ڵ�׃���\(y��n)��(d��ng)�����������S��ͬ����
��(li��n)�f(w��n)��(li��n)�S�����\(y��n)��(d��ng)�P(gu��n)ϵ��
ʮ���S�f(w��n)��(li��n)�S���ęC(j��)��(g��u)��(sh��)�H�����������B�U�C(j��)��(g��u)���ϣ����Ŀ��g�\(y��n)��(d��ng)�P(gu��n)ϵ���ѽ��������¡���(d��ng)ݔ�롢ݔ�����S���ĊA�Ǟ��ݔ���S�D(zhu��n)�ǧ�
i�D(zhu��n)�٦�
i���£�ݔ���S�D(zhu��n)�ǧ�
o�ڰ����D(zhu��n)�٦�
o���t������λ���P(gu��n)ϵʽ�飺tg��
i=tg��
pcos����ֿ���ٶ��P(gu��n)ϵʽ�飺

���ڣ������D��D2-12���ˈD��Ŀ����Ҫ�Ǟ��˺�����(y��n)�C��ʾ��
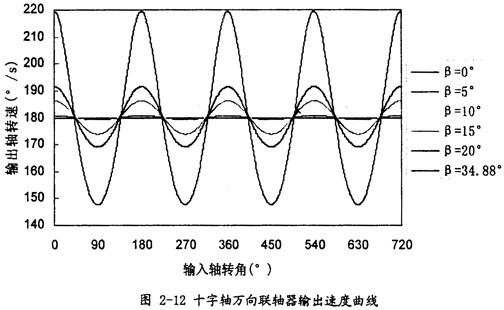
�p(li��n)ʮ���S�f(w��n)��(li��n)�S���Ƚ��ق���(d��ng)ԭ����
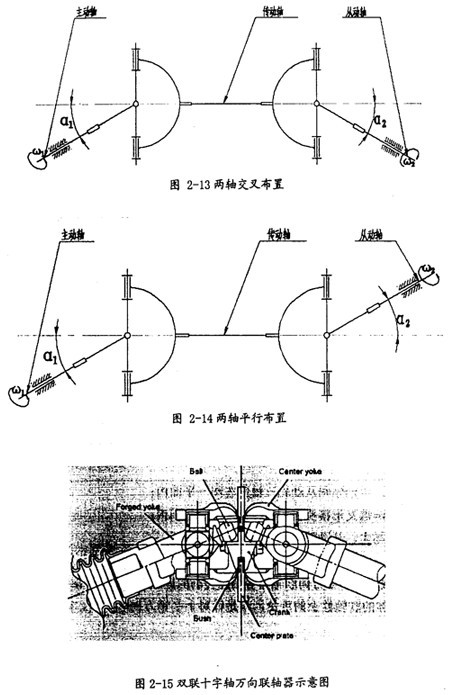
�F(xi��n)���O(sh��)�Ѓɂ�(g��)ʮ���S�f(w��n)��(li��n)�S���ո������D2-13��D2-14(li��n)����һ��Ь�ᣬ����(d��ng)�Sͬ�Ą�(d��ng)�S�c���g�S֮�g�ĊA�Ƿքe��a
l��a
2�߲ᣬ��(d��ng)����(d��ng)�S�D(zhu��n)�^(gu��)��
1����ɱ�����g�S�D(zhu��n)�^(gu��)��
0�ǣ��Ą�(d��ng)�S�D(zhu��n)�^(gu��)��
2���������t�������λ���P(gu��n)ϵ�Ӵң�������ʽ�ӣ�
��(du��)��һ��(g��)�f(w��n)��(li��n)�S���У�tg��
0=tg��
1cosa
1��(du��)�ڶ���(g��)�f(w��n)��(li��n)�S���У�tg��
0=tg��
2cosa
2���ǿɵã�tg

cosa
1 =tg

cosa
2����Ҫ�Ƚ��ٷ������

=

�t�У�a
1= a
2�@�Ӿ͵õ����p(li��n)ʮ���S�f(w��n)��(li��n)�S���Ƚ��ق���(d��ng)�r(sh��)�ăɷN���g������ʽ���ӣ�Ҳ���LjD2-13�͈D2-14��ʾ�ăɷN��ʽ��
���p(li��n)ʮ���S�f(w��n)��(li��n)�S�����@�ɷN������ʽ��ţ��������������£�
��(d��ng)�ɂ�(g��)ʮ���S�f(w��n)��(li��n)�S�����ʹ�ó������t�п��܌�(sh��)�F(xi��n)���ق���(d��ng)��ֻ��M�����l����
����(d��ng)�SѸ�ʡ�����(d��ng)�S�͏Ą�(d��ng)�S���S��(y��ng)��ͬһƽ���(n��i)��
����(d��ng)�S�ɶ˲��ν��^�IJ�ڑ�(y��ng)λ��ͬһƽ���(n��i)���ɣ�
����(d��ng)�S�c�����ۡ��Ą�(d��ng)�S֮�g���S�g�Ǒ�(y��ng)��ȡ�
�@Ҳ���p(li��n)ʮ���S�f(w��n)��(li��n)�S���Ƚ��ق���(d��ng)��ԭ�������@һ��Փ��֪���ȣ�����������һ�N���w��(li��n)�S���ϵ���Փ��ֻ��ᘌ�(du��)ʮ���S�f(w��n)��(li��n)�S����ʹ������m�÷����^խ���ʡ�
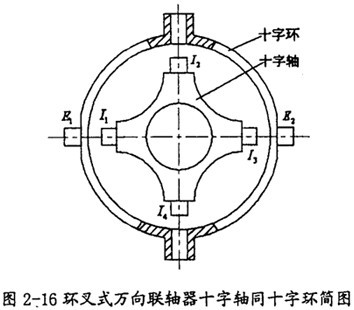
���@�ӵ���Փָ��(d��o)�£��˂������ˈD2-15��ʾ���p(li��n)ʮ���S�Ƚ����f(w��n)��(li��n)�S���Թ��������P(gu��n)�I�Y(ji��)��(g��u)�������g��ܗ�C(j��)��(g��u)��դ�������C�˃��Sͬܗ���ஔ(d��ng)�����g�S���ĊA��ʼ�K��ȣ��Ķ���(sh��)�F(xi��n)�Ƚ��ق���(d��ng)ǻɥ��
2.3.1.2�p(li��n)�����S�Ƚ��ق���(d��ng)��Փ�Įa(ch��n)Ʒ
2.3.1.2.1�h(hu��n)��ʽ�f(w��n)��(li��n)�S��
���p(li��n)ʮ���S�Ƚ����f(w��n)��(li��n)�S����Փ��ָ��(d��o)�·�Ҭ���˂������g�Ă���(d��ng)�S�s�̞��㣬������ʮ���S����(y��ng)׃?y��u)�ʮ���S��ʮ�֭h(hu��n)�ĽY(ji��)��(g��u)����D2-16��ʾ�����ߣ����Ǿͮa(ch��n)���˭h(hu��n)��ʽ�Ƚ����f(w��n)��(li��n)�S����̡���Y(ji��)��(g��u)ԭ����(ji��n)�D��D2-17��ʾ��
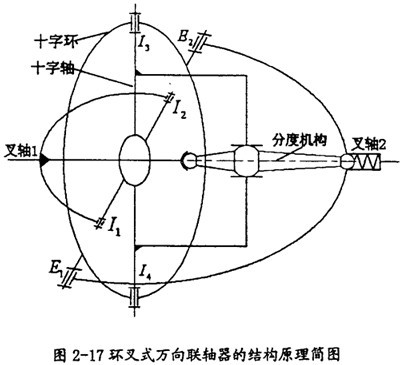
�h(hu��n)��ʽ�f(w��n)��(li��n)�S���ĽY(ji��)��(g��u)ԭ����
�h(hu��n)��ʽ�f(w��n)��(li��n)�S�������p(li��n)ʽ�f(w��n)��(li��n)�S���Ļ��A(ch��)�ϰl(f��)չ���ɵļ�л��ȡ�����g�S�ٵɣ�ʹ��ɶ˵�ʮ���S�ڎ����غϞ�һ��(g��)���棬�Ķ����C����Փ�ϵĵ��ق���(d��ng)�����������ʮ���S�دB�r(sh��)���S��(sh��)�w�l(f��)�����澪����������һ��(g��)ʮ���S��(sh��)�w�Ğ�̓�wһһ׃�Ξ�һ��(g��)�пյĈA�h(hu��n)��⬣��Q(ch��ng)�顰ʮ�֭h(hu��n)����ʮ�֭h(hu��n)���_(k��i)�ЃɌ�(du��)���ľ����ഹֱ���N(xi��o)�Ͷ��N(xi��o)�Sӣ�࣬��(sh��)�|(zh��)�Ϙ�(g��u)��̓�wʮ���S��̿��ͬ����ʮ���S���ã�ʹ̓�w�͌�(sh��)�w�ɂ�(g��)ʮ���S�ڎ������دB��һ��(g��)ƽ��껡�������f(w��n)��(li��n)�S�����С��h(hu��n)���͡��桱�ĽY(ji��)��(g��u)������±�����h(hu��n)��ʽ�f(w��n)��(li��n)�S�����ɴ˵�����
��(d��ng)�h(hu��n)��ʽ�f(w��n)��(li��n)�S�����f�D(zhu��n)�ؕr(sh��)̶ǧ���D(zhu��n)���ɲ��Sl������(d��ng)�棩����ʮ���S���գ��ق���ʮ�֭h(hu��n)�����S2���Ą�(d��ng)�棩���˙C(j��)��(g��u)�m�߂��(d��ng)�����f�������磬��Ҫ�M��������\(y��n)��(d��ng)�����������������һ�ֶ��b�ã���ˌ���\ʽ�f(w��n)��(li��n)�S���ĸܗUʽ�ֶșC(j��)��(g��u)���õ��h(hu��n)��ʽ�f(w��n)��(li��n)�S���ρ�(l��i)���@���_(d��)�����f(w��n)��(li��n)�S�������c(di��n)���\(y��n)��(d��ng)ƽ�������ѿ����Ą�(d��ng)�S�Ľ�ƽ����ĵ��ق���(d��ng)�l��ï����
�h(hu��n)��ʽ�f(w��n)��(li��n)�S�������c(di��n)��
a.�o�B(t��i)����(d��ng)�����Խ�����\ʽ�f(w��n)��(li��n)�S����
b.������A�ǿ���������D(zhu��n)�Dz���_(d��)������\ʽ�f(w��n)��(li��n)�S����ˮƽ��ұ��
c.ؓ(f��)��������ʹ�É�����ѩ���ӹ����ȵ�ͬ�ڂ��y(t��ng)���p(li��n)ʮ���S�f(w��n)��(li��n)�S����С��ͬ�r(sh��)����ʮ���S�f(w��n)��(li��n)�S����������(y��u)�c(di��n)���磺�ӹ���������ι�����ɱ��������⡢�r(ji��)����˵ȵȣ�
d.�Y(ji��)��(g��u)�o�����ڣ��ܝM��ǰ݆�(q��)��(d��ng)�I܇(ch��)�Y(ji��)��(g��u)���õ�Ҫ����ö�����ЏV韵đ�(y��ng)��ǰ����
�ֶșC(j��)��(g��u)����
�h(hu��n)��ʽ�f(w��n)��(li��n)�S����(sh��)�|(zh��)�������p(li��n)ʮ���S�f(w��n)��(li��n)�S���ӌ�(d��o)�U��\ʽ�f(w��n)��(li��n)�S���ķֶșC(j��)��(g��u)���M��;�ꡣ�h(hu��n)��ʽ�f(w��n)��(li��n)�S��ͬ��(d��o)�U��\ʽ�f(w��n)��(li��n)�S���ĵȽ��ق���(d��ng)���ԵĺÉ��P(gu��n)�I�����ɷֶșC(j��)��(g��u)���������Q����̹����(du��)�ֶșC(j��)��(g��u)���ܵ������������ȫ���������c(di��n)ʮ�������x���ǡ�
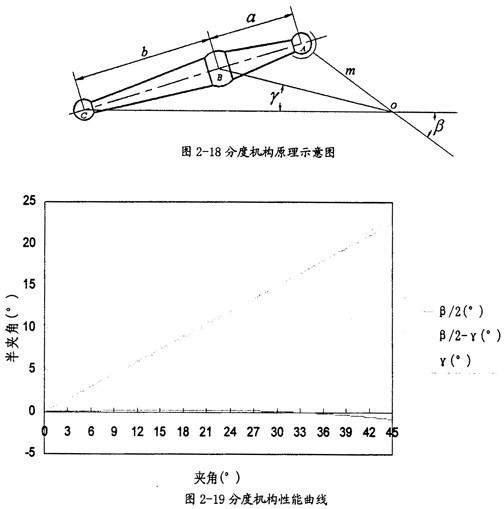
�ڭh(hu��n)��ʽ�f(w��n)��(li��n)�S���в��õķֶșC(j��)��(g��u)醲�����ʽҊ(ji��n)�D2-17�мtɫ���ַ�������(d��ng)���S1����(du��)���S2��ƫ�D(zhu��n)�r(sh��)���ֶșC(j��)��(g��u)������(g��)���^�քe����(du��)��������Ϙ�(g��u)���D(zhu��n)��(d��ng)��·���@�Ӿ͕�(hu��)����(d��ng)ʮ���S��ʮ�֭h(hu��n)ƫ�D(zhu��n)һ���ĽǶ����ѡ�����(j��)�F(xi��n)�еĵȽ��ق���(d��ng)��Փ����(d��ng)ʮ���S��ʮ�֭h(hu��n)ƫ�D(zhu��n)�ĽǶȞ���S1����(du��)���S2ƫ�D(zhu��n)�ǵ�һ��r(sh��)յ�ܣ�����(hu��)��ʮ���S��ʮ�֭h(hu��n)ƫ�D(zhu��n)�����Sl����(du��)���S2�ĵȷֽ�ƽ��ż����@�ӂ����c(di��n)�͕�(hu��)�ڵȷֽ�ƽ���(n��i)���Ķ���(sh��)�F(xi��n)�Ƚ��ق���(d��ng)�������ô�F(xi��n)�ڵ��P(gu��n)�I��(w��n)�}�ǷֶșC(j��)��(g��u)�Ƿ������Ì��Ƕ�ƫ�D(zhu��n)һ�����ǡ������ֶșC(j��)��(g��u)��ԭ����(ji��n)�D��D2-18��ʾ���C(j��)��(g��u)�и�����(sh��)���P(gu��n)ϵ����ʽ��

m=18mm��Ρ��a=9.7mm���ԣ�b=27.7mm�@��ֵ���xȡ�ѽ�(j��ng)�^(gu��)��(y��u)����
�F(xi��n)�����ֶșC(j��)��(g��u)����Փ��ƫ�D(zhu��n)��

����(sh��)�H��ƫ�D(zhu��n)�ǧ�������IJ�ĺ���(sh��)�D��ո�Σ���D2-19��ʾ�Dzܡ�
�ڈD2-19�У����Կ�����ĺ��

�겢��y�ĺ���(sh��)�D�Σ��ڦ½�С��36����ǰ�����������دB�Ŀ��ģ���36���Ժڣ����_(k��i)ʼ�����@�IJ���@һ�c(di��n)�������IJ�ֵ�������D2-19��������ϼtɫ������Ҳ���Կ��������@�����f(shu��)з�⣬�˙C(j��)��(g��u)��Ŀǰ�ij߶�����36����ǰ�����ķֶ��������ஔ(d��ng)�����ҡ�£�ֵ�ý��b���ܡ����^(gu��)�ķֶ����������ϣ����Կ������ԣ��h(hu��n)��ʽ�f(w��n)��(li��n)�S����������ȫ�ĵȽ����f(w��n)��(li��n)�S����⣬��?y��n)��?6����ǰ�ķֶ�Ҳ��С�IJ��
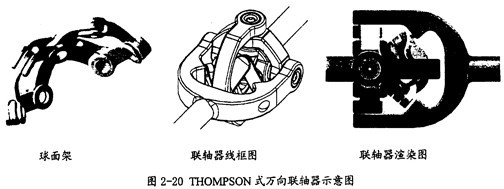
2.3.1.2.2 THOMPSON ʽ�f(w��n)��(li��n)�S��
���h(hu��n)��ʽ�f(w��n)��(li��n)�S�������gֱ���ֶȗU�D(zhu��n)׃?y��u)�����ֶșC(j��)��(g��u)��ͱ���ͳɞ�һ�N���͵ĵȽ����f(w��n)��(li��n)�S��ճ�ʣ��@����THOMPSONʽ�f(w��n)��(li��n)�S����Y(ji��)��(g��u)��D2-20��ʾ��
�@�N(li��n)�S����ͨ�^(gu��)������ܣ��D2-20��߅����(l��i)�ֶ��ã�����(du��)�h(hu��n)��ʽ�f(w��n)��(li��n)�S����(l��i)�f(shu��)�糱���Y(ji��)��(g��u)���Ǐ�(f��)�s�ˣ��������h(hu��n)��ʽ�ֶ��еĸ߸�ȫ׃?y��u)��˵��㳯���ڝ?r��n)���ϕ�(hu��)�dz���(y��u)��ʤȫ�������͕�(hu��)�����ߡ�������ĽY(ji��)��(g��u)�Ͽ�צֻ���@�N��׃?c��)�������b���ϲ�δ����(l��i)�κβ����Ź�����(j��)�F(xi��n)�еČ�(sh��)�(y��n)�Y�ϱ������@�N(li��n)�S����һ�N�Ƚ����f(w��n)��(li��n)�S�����ң�Ŀǰ�@�N(li��n)�S���ڇ�(gu��)��(n��i)߀δҊ(ji��n)�Ј�(b��o)��(d��o)��ɻ��
2.3.2 ����ʽ�Ƚ����f(w��n)��(li��n)�S������(d��ng)��Փ����a(ch��n)Ʒ
2.3.2.1 ����ʽ�Ƚ����f(w��n)��(li��n)�S������(d��ng)��Փ
����ʽ�Ƚ�����Փ
a.���S�ཻ�r(sh��)�����S���c(di��n)�c�����c(di��n)��λ�ڃ��S�����ɊA�ǵ�ƽ�����ϰӳ����Ɍ�(sh��)�F(xi��n)�f(w��n)��(li��n)�S���Ƚ����D(zhu��n)��(d��ng)���ַQ(ch��ng)ͬ������
b.���S���e(cu��)�r(sh��)�ؾ�����һ���f(w��n)��(li��n)�S��(li��n)�Ӳ��܌�(sh��)�F(xi��n)�Ƚ����D(zhu��n)��(d��ng)��Ŀ�����ۡ�
��Փ�C�����£�
�f(w��n)��(li��n)�S���ĵȽ��ٗl��
2.3.2.1.1 ��(d��ng)ݔ�롢ݔ���S�ཻ�r(sh��)�ĵȽ��ٗl��
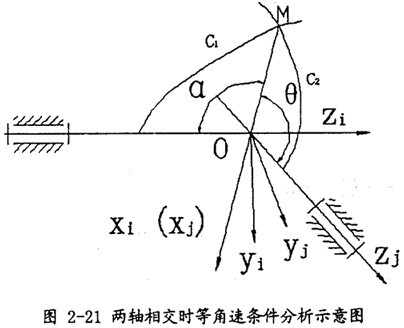
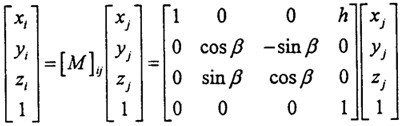
�Ȍ��f(w��n)��(li��n)�S����(ji��n)������D2-21��ʾ�Ĕ�(sh��)�W(xu��)ģ������������ģ�ͼ�����(bi��o)ϵ���£�Zi��Zj�քe����ݔ���cݔ���S��С��Xi��Xj�S�غϣ�����ֱ��Zi��Zj���M�ɵ�ƽ��ӣ�ߡ����S�g�ĊA�Ǟ�°��š��e��f(shu��)�����ǣ�����������������(bi��o)ϵ������������(bi��o)ϵ����������������Ҋ(ji��n)������Y�Sһ�㲻�٘�(bi��o)�����ߣ��ɸ���(j��)���ֶ��t�Д��䷽��
���O(sh��)M�c(di��n)�ǃ��S�ć����c(di��n)���\(y��n)��(d��ng)����C
1��C
2�Ľ��c(di��n)���ϣ�Ҳ���ǂ����c(di��n)�����O(sh��)��ʼ�l���飺��(d��ng)�r(sh��)�gt=0�r(sh��)���֣�

��ݔ���S�D(zhu��n)�ǣ���

��ݔ���S�D(zhu��n)�ǣ������㹱�����ڃ�����(bi��o)ϵOX
iY
iZ
i��OX
jY
jZ
j�����ݣ�����C
l��C
2�ķ��̷քe�飺
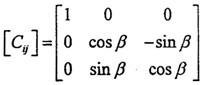
��D2-21��ʾ������(bi��o)ϵOXjYjZj���Կ���������(bi��o)ϵOXiYiZi�@Xi����Xj�����D(zhu��n)��һ��(g��)�Ǧ¶���á����D(zhu��n)�ķ������Ҿ�ꇞ飺
�M(j��n)������(bi��o)׃�Q�У�����������(bi��o)ϵOXjYjZj׃�Q������(bi��o)ϵOXiYiZi���У�Xi�ʲᣬYi��Zi������Xj�Ϻɣ�Yj��Zj���քe��ʾij�c(di��n)�ڃ�����(bi��o)ϵ�е�����(bi��o)�հ�����
���O(sh��)

�ͦ½���֪����������������ֻ������(g��)δ֪����

��t���ӣ�s�����ɣ�����Ô�(sh��)ֵ�����܉�_����⡣
�Ƚ��ٗl���Č�(d��o)����
���O(sh��)ԓ�f(w��n)��(li��n)�S����ͬ����γ��������
=
��
���ܣ�
��ȡ����ֵ��
�t�ã�
msin��=��1-cos�£���ksin i+lcos i��
����y����һ��������(n��i)�����ȡֵ�����У�
m=-w
�C����������̾�����õ�(li��n)���ཻ���S���f(w��n)��(li��n)�S��ͬ���Եėl���飺
����
�ͦµ�ȡֵ���������ī�����c(di��n)MҲ������ģ���˃��������̝M������ͬ���l���r(sh��)֭�ף����ܱ��Cݔ�뾻�֡�ݔ������ȫͬ�����������ą���(sh��)���̞飺
�O(sh��)�������Ľ��c(di��n)M�������c(di��n)���c���S�Ľ��c(di��n)��Ѷ�����B��OM�cݔ���S��Z
i�S��ؓ(f��)���S���ĊA�Ǻ��ڲء�M�cݔ���S�͊A�Ƿքe�飺���ڴ�̎|OM|=

����ʾ�����c(di��n)�c���S���c(di��n)�g�ľ��x��������
�ɴ˿ɵ�cosa=cos��Ĥ�ߣ�����0��180�� 0�ܦȡ�180�㡣����a=�����ȡ���(ji��n)����֮�����ཻ�S��ȫͬ���Ļ����l���ǣ����S���c(di��n)�c�����c(di��n)��λ�ڃ��S�����ɊA�ǵ�ƽ�����ϡ�
2.3.2.1.2 ݔ���S��ݔ���S���e(cu��)�r(sh��)��ͬ�����о�
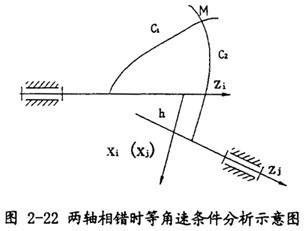
���O(sh��)���S��λ����D2-22��ʾ�ú�������ģ�ͼ�����(bi��o)ϵ���£�Zi��Zj�քe��ݔ���Sʢ�ġ�ݔ���S���O(sh��)Xi��Xj���cZi��Zj�Ĺ������غ϶��죬h����S�g����̾��xý�������S�A�Ǟ�¡�
�M(j��n)������(bi��o)׃�Q�������t����(bi��o)ϵOXjYjZj�е�ij�c(di��n)��OXiYiZi����(bi��o)ϵ�е�����(bi��o)�ɱ�ʾ�飺
�ڴ˱�ʾ����(bi��o)ϵ׃�Q��ꇾ��ɣ����S�����c(di��n)M������(bi��o)��������ã�
��̎
��
�քe��ʾݔ���S��г��ݔ���S������r(sh��)���D(zhu��n)�^(gu��)������Ƕȸ��̣�����ʽ�҂��Ɍ�(d��o)�����µ��P(gu��n)ϵʽ��
���O(sh��)�˕r(sh��)���S�܉�?q��)��F(xi��n)ͬ������
=
ª�ɣ��t��ʽֻ�Ѓɂ�(g��)δ֪����͢��ͨ�^(gu��)Ӌ(j��)�㣬�t���Ԍ�(d��o)�����S�\(y��n)��(d��ng)��݆������������ij�N�P(gu��n)ϵȪť��
�O(sh��)��2-6�������������ͨ�^(gu��)���^�ɶ˵�ϵ��(sh��)�ɵã�k=u��l=v���ã�h=0
�@�@Ȼ�c��֪�����Ĺ�����?y��n)�h��0����Ҋ(ji��n)���O(sh��)������������
�����O(sh��)��2-8��ʽ�������ȣ��t��m=0,u=O,w=0,v=O�����루2-7��ʽ�пɵ�k=l=0���ۣ��@Ȼ�@��(g��)�Y(ji��)���Ǻ��o(w��)���x�����ӣ���˼��O(sh��)��������
ͨ�^(gu��)���ϵķ����������҂�֪�����������S���e(cu��)�r(sh��)�����@�Nģ���³̵죬��һ���f(w��n)��(li��n)�S��(li��n)�Ӳ��܌�(sh��)�F(xi��n)ͬ����Ŀ�����Ρ�
2.3.2.1.3����ʽ�Ƚ����f(w��n)��(li��n)�S����Փ���Y(ji��)
����ʽ��ָ���S�ཻ�r(sh��)����r���M�������C���^(gu��)���漰���˃��S���e(cu��)�r(sh��)�ĵȽ��ٗl���C����Ⱦ����δ�ó��κνY(ji��)��ð�࣬�@�(sh��)�H��ֻ�ж���ʽ�ĵȽ�����Փ�õ����C�������C�����õ���ģ�͂����c(di��n)ֻ��һ��(g��)�����@�����f(shu��)�Y(ji��)Փ�ĵõ��ǽ�����(li��n)�S���C(j��)��(g��u)ģ�������g��(g��u)��ֻ��һ��(g��)����r������һ��(g��)����r�˽Y(ji��)Փ�Ͳ�һ�����_�˹���������@Ҳ�������@һ��Փ�đ�(y��ng)�÷������ߡ�
2.3.2.2����ʽ�Ƚ����f(w��n)��(li��n)�S���Įa(ch��n)Ʒ
����ă��(l��i)�f(w��n)��(li��n)�S���ڽY(ji��)��(g��u)��ݔ���S��ݔ���Sʼ�K�ཻ��һ�c(di��n)���ϣ�ֻͨ�^(gu��)����(l��i)���f�����ǵ��͵Ķ���ʽ�Ƚ�����Փ�đ�(y��ng)�÷��١�
2.3.2.2.1��\ʽ�f(w��n)��(li��n)�S��
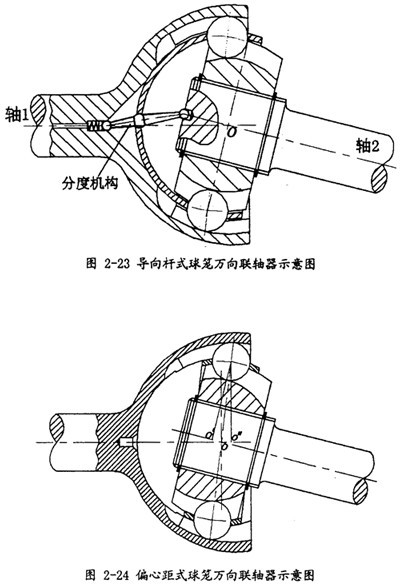
��\ʽ�f(w��n)��(li��n)�S����Ŀǰ�����(y��u)����̴����(y��ng)����V����һ�N�Ƚ����f(w��n)��(li��n)�S��������(j��)�Y(ji��)��(g��u)��ʽ�IJ�ͬ�ɷ֞�ɴ��(l��i)���ޣ�����(d��o)��Uʽ��\�f(w��n)��(li��n)�S����ƫ�ľ�ʽ��\�f(w��n)��(li��n)�S���������քe��D2-23�͈D2-24��ʾ��
��(d��o)��Uʽ��\�f(w��n)��(li��n)�S��(n��i)��h(hu��n)�����L���ϲ۵ĈA�����ĺͱ��ּ܃�(n��i)����������ľ��غϴ_���f(w��n)��(ji��)������o���ֲ�׃ǧ������D2-23��ʾ����(d��ng)���S��������(du��)�Ľ�λ�ƕr(sh��)��ͨ�^(gu��)��(d��o)��U��������ʹ���ֲ��ڃ��S�S������(du��)��λ�Ƶĵȷֽ�ƽ���Ϲ��ѣ��Ķ����C���Sͬ�����ࡣ��(d��o)��Uʽ��\�f(w��n)��(li��n)�S���������(sh��)���^�ࡢ���b���㲰�����ڑ�(y��ng)�����ܵ���һ�����������
ƫ�ľ�ʽ��\�f(w��n)��(li��n)�S����(n��i)��h(hu��n)�����L���ϲ۵ĈA������o���o������ͬƫ�ľ�քe���ڌ�(du��)�Q(ch��ng)������D2-24���{(l��n)ɫ�c(di��n)������ʾ���ăɂ�(c��)����(d��ng)���S��������(du��)�Ľ�λ�ƕr(sh��)��������ʹ���ֲ��ڃ��S�S������(du��)��λ�Ƶĵȷֽ�ƽ������̨���Ķ����C���Sͬ����
��\ʽ�f(w��n)��(li��n)�S�������c(di��n)��ͬ���Ը�ѽ�ǡ���λ�ƴ�ʦ�ۡ��Y(ji��)��(g��u)��(ji��n)�Ρ��w�eС���S����(y��u)�c(di��n)���ˡ����γ�ϵ���ȷأ����V����(y��ng)������܇(ch��)��ұ��Ţ�����p���ʺᡢ���͙C(j��)е�Ȳ��T(m��n)��
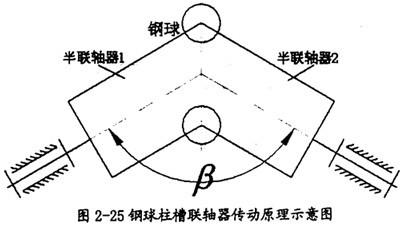
2.3.2.2.2�������(li��n)�S��
�������(li��n)�S��ͬ��\ʽ�f(w��n)��(li��n)�S��һ�Ӹ�����Ҳͨ�^(gu��)����(l��i)���f�ɂ�(g��)��(li��n)�S��֮�g����Ҫ���(d��ng)�ɂ�(g��)��(li��n)�S�����S��������(du��)�Ľ�λ�ƕr(sh��)����(li��n)�S���ϵĝL����ʹ���ֲ��ڃ��S�S������(du��)��λ�Ƶĵȷֽ�ƽ���ϣ���D2-25��ʾ��ɦ�ף��Ķ����C���Sͬ��Я�ꡣͬ��\ʽ�f(w��n)��(li��n)�S����ͬ�����������ֲ���һ��(g��)�E�A���ϣ�����\ʽ�f(w��n)��(li��n)�S���t�ֲ���һ��(g��)������黵ɡ�
�������(li��n)�S����һ�N�Y(ji��)��(g��u)�O�麆(ji��n)������������ĵ���(li��n)�S��Ҧ�̣�������Ќ�(sh��)�Ãr(ji��)ֵ�����^(gu��)���ڽY(ji��)��(g��u)�ϵ������@�N(li��n)�S�����S�g��ƫ�D(zhu��n)���^С��
2.3.3�Ƕ���ʽ�Ƚ����f(w��n)��(li��n)�S����Փ����a(ch��n)Ʒ
2.3.3.1�Ƕ���ʽ�Ƚ����f(w��n)��(li��n)�S������(d��ng)��Փ
�Ƕ���ʽ�Ƚ�����Փ��
ݔ���S��ݔ���S������(du��)�D(zhu��n)��(d��ng)˲�r(sh��)�D(zhu��n)�S��˲�r(sh��)�D(zhu��n)��(d��ng)��������(d��ng)�Sλ�ڻ�ƽ���ڃ��S�ĵȷֽ�ƽ�漸�١�
��Փ�C�����£�
2.3.3.1.1��(li��n)�f(w��n)��(li��n)�S���Ƚ��ق���(d��ng)�ı�Ҫ�l��
�O(sh��)��(li��n)�f(w��n)��(li��n)�S���Ľ��ٶȞ�

ij����ݔ���S�cݔ���S��˲�r(sh��)���ٶ���ȣ�����ٶ���

��(l��i)��ʾ�Ʋ������S���ཻ��0�c(di��n)��𣚣ƫ�D(zhu��n)�Ǧ��S�r(sh��)�g��ƫ�D(zhu��n)���ٶȞ�

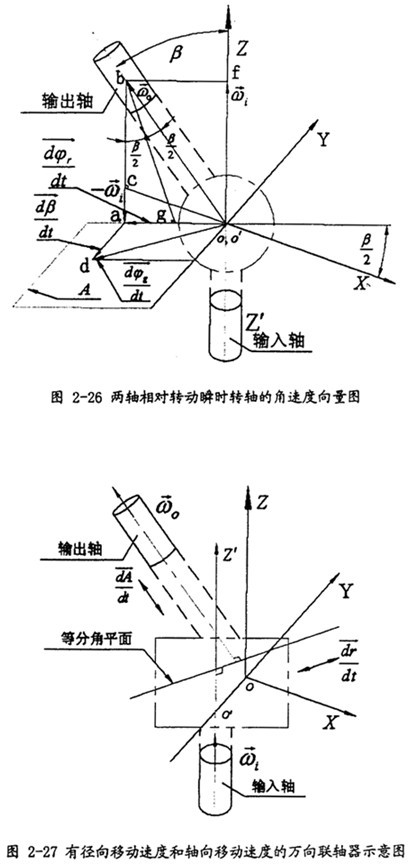
����(du��)��(li��n)�S���������D2-26��ʾ���D(zhu��n)��(d��ng)�P(gu��n)ϵʾ��D��ԡ�
���O(sh��)�o����(g��)ϵ�y(t��ng)����һ��(g��)���ٶ�-

��̳���t����(j��)��Փ���W(xu��)�е�֪�R(sh��)��֪ݔ���S��ݔ���S���P(gu��n)ϵ�Ա��ֲ�׃���@�r(sh��)ݔ���S�Ľ��ٶ�׃?y��u)�����㣬��ݔ���S���\(y��n)��(d��ng)��������ķ�����(l��i)����ͽ����
��D2-26��ʾ��ʹ

ʸ������

���࣬

ʸ������-
¡�ᣬ�ҡ�bo��f=�£���

ƽ����
����������
�������t��abo��������������b�c(di��n)��

�Ĵ����������ô���g������

��������abo��ȷֳɃɂ�(g��)ֱ�������Σ��@�ɂ�(g��)ֱ���������c��aco������������ι���
���ڣ�

����

λ�ڃ��S�ĵȷֽ�ƽ���(n��i)���������-
��
�ĺϳ�ʸ����ݔ���S����(du��)��ݔ���S�Ľ��ٶ�

Ҳλ�ڃ��S�ĵȷֽ�ƽ���(n��i)��

�Ĵ�С��ͨ�^(gu��)��o��gb�͡�ogb��(l��i)Ӌ(j��)�㣺
=2��
0sin
����

ʸ���cݔ���ݔ���S���S����ֱ�蹰������
�c
�ĺϳ�ʸ��

=
+
Ҳλ�ڃ��S�ĵȷֽ�ƽ���(n��i)�Ƽ����ϳ�ʸ��

��λ�þ���˲�r(sh��)�D(zhu��n)�S��λ�á�
�����S���ཻ�ĵȽ����f(w��n)��(li��n)�S��ݔ���S����(du��)��ݔ���S������(du��)�D(zhu��n)��(d��ng)˲�r(sh��)�D(zhu��n)�Sʼ�Kλ�ڃ��S�ĵȷֽ�ƽ���(n��i)���ԡ�ֽ�����]���f(w��n)��(li��n)�S����һ�����Σ�ݔ���S�cݔ���S�S������λ��ͬһƽ���(n��i)�������cݔ���S����ݔ���S����ֱ�ď���λ�Ƽ��������Џ����Ƅ�(d��ng)�ٶȺ��S���Ƅ�(d��ng)�ٶ�

�c

��������D2-27��ʾ��
�@Щ�Ƅ�(d��ng)�ٶȲ�Ӱ푽��ٶ�ʸ���ϳ���ף�����Ӱ�˲�r(sh��)�D(zhu��n)��(d��ng)��������(d��ng)�S�ķ�λ��ϣ����nj�(du��)���ٶ����_����˲�r(sh��)�D(zhu��n)��(d��ng)��������(d��ng)�S��λ����һ��Ӱ푣��@�r(sh��)ݔ���S����(du��)��ݔ���S��˲�r(sh��)�D(zhu��n)��(d��ng)��������(d��ng)�S����λ�ڶ���ƽ���ڃ��S�ĵȷֽ�ƽ���������@һ�Y(ji��)������?x��n)��S���ٶȴ�С��Ȟ�ǰ��l���ƌ�(d��o)����(l��i)�����棬���������(li��n)�f(w��n)��(li��n)�S�����ձ�l����(l��i)��(y��ng)�ý��ţ��F(xi��n)���˗l����(ji��n)�����£�
���е��ق���(d��ng)���ԵĆ�(li��n)�f(w��n)��(li��n)�S���ı�Ҫ�l������S������(du��)�D(zhu��n)��(d��ng)˲�r(sh��)�D(zhu��n)�S��˲�r(sh��)�D(zhu��n)��(d��ng)��������(d��ng)�Sλ�ڻ�ƽ���ڃ��S�ĵȷֽ�ƽ�档
2.3.3.1.2��(li��n)�f(w��n)��(li��n)�S���Ƚ��ق���(d��ng)�ij�֗l��
�����l����֮Ҳ�����۱�����һ����r�£�������S��һ��(g��)��(li��n)(li��n)�S��(li��n)��ĺ̬��������(du��)�D(zhu��n)��(d��ng)��˲�r(sh��)�D(zhu��n)�S��˲�r(sh��)�D(zhu��n)��(d��ng)�D����(d��ng)�Sλ�ڻ�ƽ���ڃ��S�ĵȷֽ�ƽ�����꣬�tԓ�f(w��n)��(li��n)�S�����еȽ��ق���(d��ng)���ԡ�
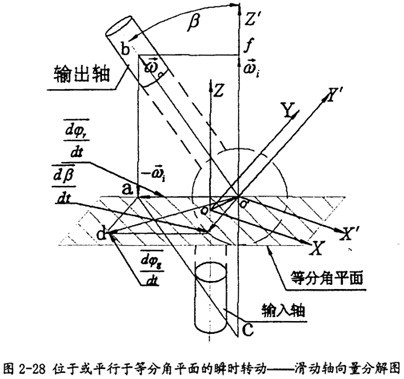
��D2-28��ʾ��ݔ���S�cݔ���Sͨ�^(gu��)һ��(g��)�f(w��n)��(li��n)�S��J(li��n)�ӹŻ������S�A�Ǧ�׃����ݔ���S����(du��)��ݔ���S����˲�r(sh��)�D(zhu��n)��(d��ng)��������(d��ng)�S��ʩ����ʸ��

��(l��i)��ʾ˲�r(sh��)�D(zhu��n)��(d��ng)��������(d��ng)�S�ķ�����ȣ�ʸ��

ƽ���ڃ��S�ĵȷֽ�ƽ�档�F(xi��n)��
�����c(di��n)λ���Ƅ�(d��ng)��O��̎Ϥ�֣�ʹ
λ�ڃ��S�ĵȷֽ�ƽ���(n��i)���
�ֽ��ƫ�D(zhu��n)���ٶ�
������(du��)���ٶ�
��D2-28��ʾ������
λ�ڵȷֽ�ƽ���(n��i)���Σ���������
��ϳ�ʸ��ɵ˭��
KTYS`82XIP{DV11.tmp)
��

���ʸ��������ƽ����߅��abo��c�У�

=

����?y��n)?IMG src="/eWebEditor/chinauepic/2010524171548507.jpg" border=0> λ�ڃ��S�ĵȷֽ�ƽ���(n��i)��

=

����(n��i)�e(cu��)����ȣ��з࣬���ԡ�abo��������������ţ�����?y��n)�ab=o��c�����Ԧ�
i=��
0���������f(w��n)��(li��n)�S���еȽ��ق���(d��ng)����̬�١�
2.3.3.1.3�Ƕ���ʽ�Ƚ����f(w��n)��(li��n)�S����Փ���Y(ji��)
���@һ��Փ�C�������õ�ģ�ͺ��C���^(gu��)�̿��Կ����������C���H�Ǐ�(li��n)�S����ݔ���ݔ���������壬��δ�漰��(li��n)�S�������g������(g��u)��������������һ�N������Փ���ʶ��@һ��Փ�C�������õ�ģ�;��ЏV���Ĵ�������������Փ����Ҳ�ЏV�����m�÷������ۡ��@�����f(shu��)�����(g��u)��������c(di��n)λ�ڻ�ƽ���ڵȷֽ�ƽ����f(w��n)��(li��n)�S�����t��(li��n)�S�����е��ق���(d��ng)���Ժ�ͺ�������@�@һ��Փ��ǰ�����Փ����ǰ�M(j��n)��һ�����㡣
2.3.3.2�Ƕ���ʽ�Ƚ����f(w��n)��(li��n)�S���Įa(ch��n)Ʒ
ͬ�Ƕ���ʽ�Ƚ����f(w��n)��(li��n)�S����Փ������f(w��n)��(li��n)�S���a(ch��n)Ʒ��Ҫ�����N�����@�N�f(w��n)��(li��n)�S���������ă��S�������ǽ���һ��(g��)��׃���c(di��n)ӡ�����@Ҳ���ǷǶ���ʽ�ĸ����겡��
2.3.3.2.1�����N(xi��o)ʽ�f(w��n)��(li��n)�S��
�����N(xi��o)ʽ�f(w��n)��(li��n)�S����һ�N���V����(y��ng)�õ�(li��n)�S�������н�30��Ěvʷ���ף���ͬ���攢���ăɷN(li��n)�S��ͬ������ʽ�f(w��n)��(li��n)�S�������������Ă���(d��ng)ԭ���ڱ��ĵĵ���������Ԕ��(x��)��������꼣���һ�N�\(y��n)��(d��ng)Ҏ(gu��)��ʮ�֏�(f��)�s��(li��n)�S���������b��ģ�ͺ��㲿��ģ�ͷքe��D2-30���ˡ��D2-29��ʾ����(li��n)�S���D(zhu��n)��(d��ng)�r(sh��)���裬���f�L�Ӽȿ�����(du��)�����S�еĻ����S���Ƅ�(d��ng)��Ҳ��������U���S�i�D(zhu��n)��(d��ng)�͏����Ƅ�(d��ng)ӧ˯�����a(b��)�����S�A�ǵ�׃����㲡�
�����N(xi��o)ʽ�f(w��n)��(li��n)�S����һ�N��(zh��n)�Ƚ���(li��n)�S�����c�������(l��i)�Ƚ���(li��n)�S����Ƚ��꣬�����(sh��)Ŀ����ϸ��Y(ji��)��(g��u)��(ji��n)�ξo�����o(w��)Փ����(d��ng)�������ª�أ�����(g��)�N(xi��o)�Sȫ�����ӹ��������˂���(d��ng)Ť��������(qi��ng)�������ɿ�ˮ����(li��n)�S��������(du��)�\(y��n)��(d��ng)����L��(d��ng)Ħ����ϵ��Ħ���pʧС������(d��ng)Ч�ʸ�������^(gu��)���ĝL��ͬ�����Ľ��|�Ǹ߸������|����������(d��ng)�н��|��(y��ng)���^����һ���ij̶��Ͽ������������Ă�ݔ�������ǡ�
2.3.3.2.2����U����ʽ�f(w��n)��(li��n)�S��
����U����ʽ�f(w��n)��(li��n)�S�����°l(f��)չ����(l��i)��һ�N�^������f(w��n)��(li��n)�S��ǣ����b��ģ�ͺ��㲿��ģ�ͷքe��D2-32���D2-31��ʾ��Χ�������\(y��n)��(d��ng)��ʽ�ڱ��ĵĵ���������Ԕ��(x��)��������Խ������(du��)�������N(xi��o)ʽ�f(w��n)��(li��n)�S��������ǰ�ߵĸ߸������|�Ğ�����|��ˣ�������(li��n)�S���Ă�ݔ����������
�@�N(li��n)�S���Y(ji��)��(g��u)�����칤ˇ��(ji��n)�Σ�����(d��ng)ƽ��(w��n)��Ӧ����ݔ��ױ�硢ݔ�����S�S�����^��ĊA�ǂ���(d��ng)�r(sh��)���ܱ��C�Ƚ��ق���(d��ng)�����ܡ�
����U����ʽ�f(w��n)��(li��n)�S������һ�N���ͷǶ���ʽ�f(w��n)��(li��n)�S�����_(d��)���Ƚ��ق���(d��ng)�Ҿ��Ѓ�(y��u)�����ܲ��������ЏV韵đ�(y��ng)��ǰ�����ݡ�
2.3.3.2.3����U���Kʽ�f(w��n)��(li��n)�S��
����U���Kʽ�f(w��n)��(li��n)�S����һ�N���͵��f(w��n)��(li��n)�S�������b��ģ�ͺ��㲿��ģ�ͷքe��D2-34�������D2-33��ʾ�ɻҡ���ͬ����U����ʽ�f(w��n)��(li��n)�S��ֻ���ڽY(ji��)��(g��u)�����в�ͬ����ǰ�ߵĻ��U׃?y��u)��˻��K�ʴ����@�����ڽY(ji��)��(g��u)�ϵ������ѿʣ���ƫ�D(zhu��n)������(du��)׃С�������ݔ��������(du��)��ߡ�
�@�N(li��n)�S���Y(ji��)��(g��u)��(ji��n)���˶����o�����������b�䲻�茣(zhu��n)���O(sh��)�䣬��ˇ��(ji��n)�ε��٣���r(ji��)�ͻ�������ݔ������(qi��ng)�����ЏV韵đ�(y��ng)��ǰ��Ӽ�졣���^(gu��)��ͬ����U����ʽ�f(w��n)��(li��n)�S��һ���ڝ�(r��n)��������ܺ��y�O(sh��)Ӌ(j��)���@���ډ����Ͽ��ܾ�����(du��)�^�����ܡ�
2.3.3.2.4���e(cu��)�S�Ƚ����f(w��n)��(li��n)�S��
���e(cu��)�S�Ƚ����f(w��n)��(li��n)�S�����b��ģ�ͺ��㲿��ģ�ͷքe��D2-7�������D2-6��ʾ���@һ�N(li��n)�S��Ŀǰ߀ͣ�����о��A���±ߡ����������\(y��n)��(d��ng)����������������칤ˇ��(ji��n)�Σ��܌�(sh��)�F(xi��n)���e(cu��)�S�ĵȽ��ق���(d��ng)���������������c(di��n)�ǿ����ڽ��e(cu��)��r��ջվ���M(j��n)��90�ȊA�ǵ��\(y��n)��(d��ng)����(g��u)�����������r�£���
2.4��ͬ��Փ���m�÷�����(li��n)ϵ
��ǰ�������N��Փ����������Կ��������������ચ(d��)��Ъ�̣������ڸ��Ե��m�÷�����(n��i)�����(li��n)ϵ��
�p(li��n)ʮ���S�f(w��n)��(li��n)�S����Փֻᘌ�(du��)ʮ���S�f(w��n)��(li��n)�S���m��˪�棬����(d��ng)�h(hu��n)��ʽ��THOMPSONʽ�f(w��n)��(li��n)�S�����F(xi��n)���»ţ������������÷ֶșC(j��)��(g��u)�������c(di��n)�D(zhu��n)���ȷֽ�ƽ�棬�@һ�c(di��n)ͬ����ʽ�Ƚ��ٵ���Փ��ͬ���䡣��(d��ng)�Ƕ���ʽ�Ƚ��ٵ���Փ���F(xi��n)��ҷ�����������ǰ������еȽ�����Փ���ɞ��(li��n)�f(w��n)���S���Ƚ��ق���(d��ng)���ձ�Ҏ(gu��)�ɷ�
2.5�����Y(ji��)
�����^��ϵ�y(t��ng)�ؿ��Y(ji��)�ˬF(xi��n)�еĵȽ�����Փ�潾�������͵ĵȽ����f(w��n)��(li��n)�S���ṩ����Փ���A(ch��)��
�ĵȽ��ٻ��D(zhu��n)�B�U�C(j��)��(g��u)̽ӑ�����쳩���w�{�����Y(ji��)���ڵȽ��ٻ��D(zhu��n)�B�U�C(j��)��(g��u)�����³ɹ��������f(shu��)���ж�N��ʽ���B�U�C(j��)��(g��u)���е��ق���(d��ng)���ԣ������������͵Ƚ����f(w��n)��(li��n)�S�����ƵęC(j��)��(g��u)�W(xu��)���A(ch��)��ѱ��
��(du��)�F(xi��n)�е����N�Ƚ�����Փ��������(y��ng)�ĵ��ͮa(ch��n)Ʒ�갳���M(j��n)���˿��Y(ji��)�ͱ��^���o�����������Ե��m�÷�������g��(li��n)ϵ��ͮ�����M(j��n)һ���ĵȽ�����Փ�о������˻��A(ch��)���ۣ�Ҳ�����͵Ƚ����f(w��n)��(li��n)�S���İl(f��)���ṩ����Փָ��(d��o)��ȡ�