RVúpňŔ∆ųĻŐ”–Ól¬ Ķń—–ĺŅ
RVúpňŔ∆ų÷ų“™”√”ŕôC(j®©)∆ų»ň÷–į¬ŐŰ£¨∂ÝôC(j®©)∆ų»ňƶ(du®¨)łŖ∂®őĽĺę∂»ļÕĶÕ’ŮĄ”(d®įng)ňģ∆ĹĶń“™«ů∑«≥£áņ(y®Ęn)łŮ—ż“Į£¨“ÚīňŖÄĪōŪöŅľĎ]RVúpňŔ∆ųĶńĄ”(d®įng)ĎB(t®§i)Őō–‘ĶŗŅ•£¨ĆĘ∆š’ŮĄ”(d®įng)Ōř÷∆ĶĹļ‹ĶÕĶńňģ∆Ĺ°£ěťīň√–”ť£¨Īĺ’nÓ}ņŻ”√”–Ōř‘™∑÷őŲ‹õľĢANSYSƶ(du®¨)úpňŔ∆ųĶńĻŐ”–Ól¬ ŖM(j®¨n)––Ńň—–ĺŅĹł√Á£¨∑÷őŲ∆š’ŮĄ”(d®įng) «∑ŮŖ_(d®Ę)ĶĹ“™«ů°£
5.1ĹY(ji®¶)ėč(g®įu)’ŮĄ”(d®įng)∑÷őŲņŪ’ď
úpňŔ∆ų÷ų“™”…ôC(j®©)ľ‹Š„Ĺ…°ĘżX›ÜľŇ∆Ń°Ę›S°Ę›S≥–Ķ»‘™ľĢĹM≥…ń»¬ß£¨Ć¶(du®¨)”ŕīňÓźŌĶĹy(t®Įng)«®Ųģ£¨‘ŕÉ»(n®®i)≤ŅļÕÕ‚≤Ņľ§ĄÓ(l®¨)Ō¬ĆĘįl(f®°)…ķôC(j®©)–Ķ’ŮĄ”(d®įng)°£’ŮĄ”(d®įng)ŌĶĹy(t®Įng)ĶńĻŐ”–Őō–‘įŔ”Ó£¨“Ľį„įŁņ®ĻŐ”–Ól¬ ļÕ’Ů–ÕŅľŃģ£¨ňŁ «ŌĶĹy(t®Įng)ĶńĄ”(d®įng)ĎB(t®§i)Őō–‘÷ģ“Ľ£¨Ć¶(du®¨)ŌĶĹy(t®Įng)ĶńĄ”(d®įng)ĎB(t®§i)ŪĎĎ™(y®©ng)ňģ≤ů°ĘĄ”(d®įng)›dļ…Ķńģa(ch®£n)…ķŇcāųŖf“‘ľįŌĶĹy(t®Įng)’ŮĄ”(d®įng)Ķń–ő ĹĶ»ĺŖ”–÷ō“™Ķń”įŪĎŐő’ °£∂ÝĹY(ji®¶)ėč(g®įu)‘॔(d®įng)›dļ…◊ų”√Ō¬ňýĪŪ¨F(xi®§n)≥ŲĀŪ(l®Ęi)ĶńĄ”(d®įng)ĎB(t®§i)Őō–‘ «ĹY(ji®¶)ėč(g®įu)Ą”(d®įng)ѶĆW(xu®¶)ĶńĽýĪĺ»őĄ’(w®ī)°£
ĹY(ji®¶)ėč(g®įu)Ą”(d®įng)ѶĆW(xu®¶)÷–≥£”√Ķń∑÷őŲń£–Õ «ľĮ÷–ÖĘĒĶ(sh®ī)ń£–ÕĻĶ÷«£¨ľĮ÷–ÖĘĒĶ(sh®ī)ń£–Õ «”√≥£őĘ∑÷∑Ĺ≥ŐĀŪ(l®Ęi)√Ť ŲĶńŐ›Ĺ≥£¨∂Ý‘ŕľĮ÷–ÖĘĒĶ(sh®ī)ń£–Õ÷–◊Ó≥£”√Ķń «”–Ōř‘™ń£–Õ

£®5-1£©
∆š÷–£¨M∑»Ĺŗ°Ęc∑Ų»ř°ĘK∑÷ĄeěťŅāůwŔ|(zh®¨)ŃŅĺōÍá°Ę◊ŤńŠĺōÍáļÕĄā∂»ĺōÍá»Ô–§£¨

∑ý÷ģ°Ę

°Ę

ěťĹY(ji®¶)ėč(g®įu)Ķńľ”ňŔ∂»ŌÚŃŅ÷ū∂Ļ°ĘňŔ∂»ŌÚŃŅļÕěťőĽ“∆ŌÚŃŅ–Ő—◊£¨f(t£©ěťĹY(ji®¶)ėč(g®įu)Ķńľ§’ŮѶŌÚŃŅļŲ’Ő°£
»Űüo(w®≤)Õ‚Ń¶◊ų”√£¨ľīf(t)=0∆÷“Ž£¨ĄtĶ√ĶĹŌĶĹy(t®Įng)Ķń◊‘”…’ŮĄ”(d®įng)∑Ĺ≥ŐįŰľŔ°£‘ŕ«ůĹY(ji®¶)ėč(g®įu)◊‘”…’ŮĄ”(d®įng)ĶńÓl¬ ļÕ’Ů–Õľī«ůĹY(ji®¶)ėč(g®įu)ĶńĻŐ”–Ól¬ ļÕĻŐ”–’Ů–Õēr(sh®™)£¨◊ŤńŠĆ¶(du®¨)ňŁāÉ”įŪĎ≤Ľīůĺę÷—£¨“Úīň√Ī—∆£¨◊ŤńŠŪó(xi®§ng)Ņ…“‘¬‘»•£¨Ŗ@ēr(sh®™)üo(w®≤)◊ŤńŠ◊‘”…’ŮĄ”(d®įng)ĶńŖ\(y®īn)Ą”(d®įng)∑Ĺ≥Őěť

£®5-2£©
īňēr(sh®™)ŌĶĹy(t®Įng)īś‘ŕnāÄ(g®®)ĻŐ”–Ól¬ ļÕnāÄ(g®®)÷ų’Ů–Õ≤≥≥ŕ°£√Ņ“ĽĆ¶(du®¨)Ól¬ ļÕ’Ů–ÕīķĪŪ“ĽāÄ(g®®)Üő◊‘”…∂»ŌĶĹy(t®Įng)Ķń◊‘”…’ŮĄ”(d®įng)°£Ŗ@∑N‘ŕ◊‘”…’ŮĄ”(d®įng)ēr(sh®™)ĹY(ji®¶)ėč(g®įu)ňýĺŖ”–ĶńĽýĪĺ’ŮĄ”(d®įng)Őō–‘∑QěťĹY(ji®¶)ėč(g®įu)Ķńń£ĎB(t®§i)…űīÝ°£∂ŗ◊‘”…∂»ŌĶĹy(t®Įng)Ķń◊‘”…’ŮĄ”(d®įng)Ņ…“‘∑÷Ĺ‚ěťnāÄ(g®®)Üő◊‘”…∂»ĶńļÜ(ji®£n)÷C’ŮĄ”(d®įng)ĶńĮBľ”ňżŅŌ£¨ĽÚ’Ŗ’f(shu®≠)ŌĶĹy(t®Įng)Ķń◊‘”…’ŮĄ”(d®įng) «nāÄ(g®®)ĻŐ”–ń£ĎB(t®§i)’ŮĄ”(d®įng)ĶńĺÄ–‘ĹMļŌ°£Ŗ@“‚ő∂÷Ý∂ŗ◊‘”…∂»ŌĶĹy(t®Įng)“Ľį„’f(shu®≠)ĀŪ(l®Ęi)≤Ľ «◊ųń≥“ĽāÄ(g®®)ĻŐ”–Ól¬ Ķń◊‘”…’ŮĄ”(d®įng)∂Ý «◊ų∂ŗāÄ(g®®)ĻŐ”–Ól¬ ĶńļÜ(ji®£n)÷C’ŮĄ”(d®įng)ĶńļŌ≥…’ŮĄ”(d®įng)”•Ļů°£
‘O(sh®®)∂ŗ◊‘”…∂»ŌĶĹy(t®Įng)◊‘”…’ŮĄ”(d®įng)÷–ń≥“ĽļÜ(ji®£n)÷C’ŮĄ”(d®įng)–ő ĹĶńĹ‚ěť

£®5-3£©
Ąt

£®5-4£©
ĆĘ Ĺ£®5-3),(5-4£©īķ»Ž Ĺ£®5-2£©Ņ…Ķ√
£®K-¶ō
2M£©

=0 £®5-5£©
“Ú?y®§n)?ěť∑«Ń„ŌÚŃŅ«ÁįĪ£¨ňý“‘Īō”–»ÁŌ¬ĶńÓl¬ ∑Ĺ≥Ő
det£®K-¶ō2M£©=0 £®5-6£©
∑≤ «ĚM◊„Ól¬ ∑Ĺ≥ŐĶń ļÕ¶ōĺýīķĪŪ‘ď◊‘”…’ŮĄ”(d®įng)ŌĶĹy(t®Įng)ń≥“ĽŽAĶńĽýĪĺ’ŮĄ”(d®įng)Őō–‘£¨ľīŌĶĹy(t®Įng)Ķńń≥“ĽŽAń£ĎB(t®§i)ĶÔ š°£«ůĹ‚ Ĺ£®5-6£©Ķ√ĶĹnāÄ(g®®)Őō’ų÷Ķ◊—«į£¨Őō’ų÷ĶīķĪŪ‘ďŌĶĹy(t®Įng)ĶńłųŽAĻŐ”–Ól¬ ĻŐ”–Ól¬ ĺŖ”–»ÁŌ¬ŐōŁc(di®£n)£ļ(l£©ĻŐ”–Ól¬ ÉHļÕŌĶĹy(t®Įng)ĻŐ”–ĶńŔ|(zh®¨)ŃŅļÕĄā∂»”–ÍP(gu®°n)∂ÝļÕÕ‚ĹÁľ§ĄÓ(l®¨)üo(w®≤)ÍP(gu®°n)£¨üo(w®≤)◊ŤńŠŌĶĹy(t®Įng)ĶńĻŐ”–Ól¬ ĺý «’żĆć(sh®™)ĒĶ(sh®ī)∑ůľō£Ľ(2£©ĻŐ”–Ól¬ «ŌĶĹy(t®Įng)Őé‘ŕļÜ(ji®£n)÷C’ŮĄ”(d®įng)ēr(sh®™)ĶńÓl¬ ÷¶ļŚ£¨∂ŗ◊‘”…∂»ŌĶĹy(t®Įng)Őé”ŕļÜ(ji®£n)÷C’ŮĄ”(d®įng) «÷ł∂ŗ◊‘”…∂»ŌĶĹy(t®Įng)ĶńŔ|(zh®¨)Łc(di®£n)ĺýŐé‘ŕļÜ(ji®£n)÷C’ŮĄ”(d®įng)†ÓĎB(t®§i)£Ľ(3£©ňŁāÉ”…–°ĶĹīůŇŇŃ––ű‘Ų£¨ľī¶ō1°‹¶ō2°‹°≠°‹¶ōnĶ¬ľģ°£
ĆĘłųŽAĻŐ”–Ól¬ ¶ōi£¨(i-l,2≤ňÁ‘£¨°≠ŌŻň £¨n£©“ņīőīķ»Ž∑Ĺ≥Ő Ĺ£®5-6£©Ī„Ķ√ĶĹnāÄ(g®®)Őō’ųŌÚŃŅ£¨ľīŌĶĹy(t®Įng)ĶńnāÄ(g®®)÷ų’Ů–ÕŌ‹÷£°£÷ų’Ů–ÕŇcĻŐ”–Ól¬ «“Ľ“ĽĆ¶(du®¨)Ď™(y®©ng)Ķń◊‚ľ»£¨≤ĽÕ¨ĶńĻŐ”–Ól¬ ƶ(du®¨)Ď™(y®©ng)÷Ý≤ĽÕ¨Ķń÷ų’Ů–Õ°£
5.2ń£ĎB(t®§i)∑÷őŲļÜ(ji®£n)Ĺť
ĹY(ji®¶)ėč(g®įu)Ą”(d®įng)ĎB(t®§i)‘O(sh®®)”č(j®¨)“™«ůłýďĢ(j®ī)ĹY(ji®¶)ėč(g®įu)ĶńĄ”(d®įng)›dĻ¶õr‘¨¬Ę£¨łýďĢ(j®ī)ƶ(du®¨)ĹY(ji®¶)ėč(g®įu)ŐŠ≥ŲĶńĻ¶ń‹“™«ůľį‘O(sh®®)”č(j®¨)ú (zh®≥n)Ątňřįő£¨įī’’ĹY(ji®¶)ėč(g®įu)Ą”(d®įng)ѶĆW(xu®¶)Ķń∑÷őŲ∑Ĺ∑®ļÕĆć(sh®™)Úě(y®§n)∑Ĺ∑®∑īŹÕ(f®ī)ŖM(j®¨n)––∑÷őŲļÕ”č(j®¨)ň„£¨∂ÝĹY(ji®¶)ėč(g®įu)ń£ĎB(t®§i)∑÷őŲ «ĹY(ji®¶)ėč(g®įu)Ą”(d®įng)ĎB(t®§i)‘O(sh®®)”č(j®¨)Ķńļň–ńĻńŃŔ°£ŹńőÔņŪ∑Ĺ√śŅī∑ĺ∂∑£¨ń£ĎB(t®§i)ĪŪ ĺ∆šüo(w®≤)◊ŤńŠ◊‘”…’ŮĄ”(d®įng)ēr(sh®™)ĶńłųŽAĻŐ”–Ól¬ ļÕ÷ų’Ů–Õ£¨ňŁĪŪ√ųĹY(ji®¶)ėč(g®įu)ĶńĻ≤’ŮÓl¬ “‘ľį‘ŕłųŽAÓl¬ Ō¬ĹY(ji®¶)ėč(g®įu)ĶńŌŗƶ(du®¨)◊É–őŅż–≤°£āųĹy(t®Įng)ĶńĄ”(d®įng)ĎB(t®§i)∑÷őŲ÷Ľ «‘ŕôC(j®©)∆ų÷∆≥…ļů‘ŕēr(sh®™)”ÚÉ»(n®®i)úy(c®®)∂®ôC(j®©)∆ų”–ÍP(gu®°n)ĹY(ji®¶)ėč(g®įu)Ķń’ŮĄ”(d®įng)ŃŅĻ≤¬›£¨ľīŖxďٻ۳…úy(c®®)Łc(di®£n)úy(c®®)∂®∆šőĽ“∆ł√Ž»°ĘňŔ∂»ľįľ”ňŔ∂»ŽSēr(sh®™)ťg◊ÉĽĮĶń«ķĺÄ£¨Ŗ@∑N∑Ĺ∑®≤Ľń‹÷ĪĹ”ŃňĹ‚ŌĶĹy(t®Įng)ĶńĄ”(d®įng)ĎB(t®§i)Őō–‘“‘ľįŪĎĎ™(y®©ng)ļÕĹY(ji®¶)ėč(g®įu)÷ģťgĶńÍP(gu®°n)ŌĶ√Í≤Ľ£¨“Úīňľ»≤Ľń‹’“≥Ųģa(ch®£n)…ķń≥∑NŪĎĎ™(y®©ng)Ķń‘≠“Ú‘»ļŚ£¨łŁ≤Ľń‹‘ŕ‘O(sh®®)”č(j®¨)ŽA∂őĺÕÓA(y®ī)“ä∆šĄ”(d®įng)ĎB(t®§i)Őō–‘°£Ć¶(du®¨)Ī»÷ģŌ¬≥Ż¬ý£¨ń£ĎB(t®§i)∑÷őŲĶń÷ō“™–‘Ô@∂Ý“◊“äŌ—Ĺņ°£
ƶ(du®¨)ĹY(ji®¶)ėč(g®įu)ŖM(j®¨n)––ń£ĎB(t®§i)∑÷őŲ «ANSYSĶńŹä(qi®Ęng)īůĻ¶ń‹÷ģ“Ľ°£ń£ĎB(t®§i)∑÷őŲ”√”ŕī_∂®‘O(sh®®)”č(j®¨)÷–ĶńĹY(ji®¶)ėč(g®įu)ĽÚôC(j®©)∆ų≤ŅľĢĶń’ŮĄ”(d®įng)Őō–‘£®ĻŐ”–Ól¬ ļÕ’Ů–Õ£©ŐŰĪŁ£¨∆š∑÷őŲŖ^(gu®į)≥Ő÷ų“™”…ňńāÄ(g®®)≤ĹůEĹM≥…£ļ
1.Ĺ®ń£
Ĺ®ń£Ŗ^(gu®į)≥Ő÷–ĪōŪö◊Ę“‚“‘Ō¬É…Łc(di®£n)£ļ
(l£©‘ŕń£ĎB(t®§i)∑÷őŲ÷–÷Ľ”–ĺÄ–‘––ěť «”––ßĶń∑®Ő›£¨»ÁĻŻ÷ł∂®Ńň∑«ĺÄ–‘Üő‘™£¨ĆĘ◊ųěťĺÄ–‘ĶńĀŪ(l®Ęi)ƶ(du®¨)īżŌ¨łŇ°£
(2£©≤ńŃŌ–‘Ŕ|(zh®¨)Ņ…“‘ «ĺÄ–‘ĶńĽÚ∑«ĺÄ–‘ĶńŃĘ—∆°ĘłųŌÚÕ¨–‘ĶńĽÚ’żĹĽłųŌÚģź–‘Ķń°Ęļ„∂®ĶńĽÚŇcúō∂»ŌŗÍP(gu®°n)Ķń“Ų‘Ó°£‘ŕń£ĎB(t®§i)∑÷őŲ÷–ĪōŪö÷ł∂®Źó–‘ń£ŃŅEx£®ĽÚń≥∑N–ő ĹĶńĄā∂»£©ļÕ√‹∂»DENS£®ĽÚń≥∑N–ő ĹĶńŔ|(zh®¨)ŃŅ£©Óűī¬£¨∂Ý∑«ĺÄ–‘Őō–‘ĆĘĪĽļŲ¬‘°£
2.ľ”›dľį«ůĹ‚
(l£©ŖxďŮ“Ľ∑NļŌŖmĶńń£ĎB(t®§i)ŐŠ»°∑Ĺ∑®’°–ů°’…Ļģ£Ņ…ŖxĶńń£ĎB(t®§i)ŐŠ»°∑Ĺ∑®”–£ļ
1)Subspace∑®£®◊”Ņ’ťg∑®£©£¨‘ď∑Ĺ∑®Ŗm”√”ŕīů–Õƶ(du®¨)∑QŐō’ų÷Ķ«ůĹ‚ÜĖÓ}ń«ňů°≥¨ī‘£Ņ…“‘”√é◊∑N«ůĹ‚Ņō÷∆ŖxŪó(xi®§ng)ĀŪ(l®Ęi)Ņō÷∆◊”Ņ’ťgĶŁīķŖ^(gu®į)≥Ő°£
2)Blook Lanozos∑®£®∑÷ČKĶńŐmňųňĻ∑®£©ŅĘ —£¨Ŗm”√”ŕīů–Õƶ(du®¨)∑QŐō’ų÷Ķ«ůĹ‚ÜĖÓ}Ń‚—‚°£
3)PowerDynamics∑®£¨īň∑Ĺ∑®Ŗm”√”ŕ∑«≥£īůĶńń£–Õ£®100000āÄ(g®®)◊‘”…∂»“‘…Ō£©”©÷ņ£¨”»∆šŖmļŌ”ŕ÷Ľ«ůĹ‚ĹY(ji®¶)ėč(g®įu)«įé◊ŽAń£ĎB(t®§i)ņŪīŔ£¨“‘ŃňĹ‚ĹY(ji®¶)ėč(g®įu)ĆĘ»ÁļőŪĎĎ™(y®©ng)Ķń«ť–ő£¨Ĺ”÷ÝŅ…“‘ŖxďŮļŌŖmĶńŐŠ»°∑Ĺ∑®£®subspaceĽÚBlock Lanczos£©«ůĶ√◊ÓĹKĶńĹ‚ļł÷Š°£
4£©Reduced Householder∑®£®ļņňĻĽŰ†ĖĶ¬∑®£©Ņōň®£¨ňŁĪ»Subspace∑®Ņž£¨Ķęĺę∂»›^ĶÕŌŗňů°£
5£©Unsymmetric∑®£®∑«Ć¶(du®¨)∑Q∑®£©, ‘ď∑Ĺ∑®Ŗm”√”ŕŌĶĹy(t®Įng)ĺōÍáěť∑«Ć¶(du®¨)∑QĺōÍáĶńÜĖÓ}Ń…ļű£¨ņż»ÁŃųůw“ĽĹY(ji®¶)ėč(g®įu)ŌŗĽ•◊ų”√ÜĖÓ}°£
6)Damped∑®ÕŅĶő£¨÷ų“™”√”ŕ◊ŤńŠ≤ĽŅ…ļŲ¬‘ĶńÜĖÓ}ņż»Á›S≥–ÜĖÓ}”—Ĺī°£
‘ŕīů∂ŗĒĶ(sh®ī)∑÷őŲŖ^(gu®į)≥Ő÷–ĆĘŖx”√Subspace∑®°ĘBlock Lanczos∑®°ĘReduced Householder∑®ĽÚPowerDynamics∑®Ķř…ľ£¨Unsymmetric∑®ļÕDamped∑®÷Ľ‘ŕŐō ‚«ť–őŌ¬≤ŇēĢ(hu®¨)”√ĶĹīł‘Í£¨“ÚīňĪĺ’nÓ}÷–∑÷Ąe≤…”√«įÉ…∑N∑Ĺ∑®ŖM(j®¨n)––Ńň«ůĹ‚,Ķ√ĶĹŌŗÕ¨ĶńĹY(ji®¶)ĻŻ°£
(2£©‘ŕń£–Õ…Ōľ”›dļ…ĽÚŌÍ°£‘ŕĶš–ÕĶńń£ĎB(t®§i)∑÷őŲ÷–ő®“Ľ”––ßĶń°į›dļ…°Ī «Ń„őĽ“∆ľs ÝŌĶ–Ŗ°£»ÁĻŻ‘ŕń≥āÄ(g®®)DOFŐé÷ł∂®Ńň“ĽāÄ(g®®)∑«Ń„őĽ“∆ľs Ý£¨≥Ő–Ú?q®Ī)Ę“‘Ń„őĽ“∆ľs ÝŐśīķ‘ŕ‘ďDOFŐéĶń‘O(sh®®)÷√į‘«Ŕ°£Ć¶(du®¨)”ŕ∆šňŁÓź–ÕĶńľs ÝĹ∑’Ů£¨»ÁѶ°ĘČļѶőŗ≥ň°Ęúō∂»Ňž”≠°Ęľ”ňŔ∂»Ķ»£¨Ņ…“‘‘ŕń£ĎB(t®§i)∑÷őŲ÷–÷ł∂®—°Ķų£¨Ķę‘ŕń£ĎB(t®§i)ŐŠ»°ēr(sh®™)ĆĘĪĽļŲ¬‘ľ–Ļ©°£
3.”^≤žĹY(ji®¶)ĻŻ£¨ĹY(ji®¶)ĻŻįŁņ®ĻŐ”–Ól¬ ļÕ’Ů–ÕŠęňŠ°£
5.3 RVúpňŔ∆ų”–Ōř‘™ń£–ÕĶńĹ®ŃĘľį∑÷őŲĹY(ji®¶)ĻŻ
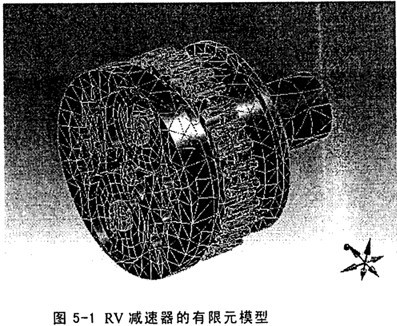
ĆĘUG÷–Ķńé◊ļőń£–ÕĆß(d®£o)»ŽĶĹANSYS÷–Ĺ‘ľŠ£¨ņŻ”√∆šAWEń£ČKŅ…◊‘Ą”(d®įng)ĶōĄĚ∑÷ĺW(w®£ng)łŮŃ◊∆Ų°Ę ©ľ”Ĺ””|Ī“’ŕ°£‘ŕƶ(du®¨)ôC(j®©)–ĶŌĶĹy(t®Įng)ŖM(j®¨n)––”–Ōř‘™∑÷őŲēr(sh®™)£¨ňýĹ®ŃĘĶńń£–Õ‘ŕŖ_(d®Ę)ĶĹňý“™«ů∑÷őŲĺę∂»Ķń«įŐŠŌ¬Ď™(y®©ng)‘ďĪMŃŅļÜ(ji®£n)ÜőŃ£…ĺ£¨Ŗ@ė”Ņ…“‘ĻĚ(ji®¶) °”č(j®¨)ň„ēr(sh®™)ťgűÔ”°£¨“ÚīňŅľĎ]ĶĹŠėżXö§ŇcôC(j®©)őÔĻŐĹY(ji®¶)£¨≤Ľ”įŪĎ∑÷őŲ∆®ő‹£¨Ĺ®ŃĘ”–Ōř‘™ń£–Õ«įĆĘŠėżXö§»•≥żňŮľů°£Ć¶(du®¨)”ŕRVúpňŔ∆ųŖx”√įňĻĚ(ji®¶)Łc(di®£n)Ńý√śůwĆć(sh®™)ůwÜő‘™ĀŪ(l®Ęi)ĄĚ∑÷ĺW(w®£ng)łŮ£¨Ļ≤ĄĚ∑÷ěť56139āÄ(g®®)Üő‘™ļÕ97246āÄ(g®®)ĻĚ(ji®¶)Łc(di®£n)łÝĽ›£¨ĄĚ∑÷ĺW(w®£ng)łŮļůĶń”–Ōř‘™ń£–Õ»ÁąD5-1ňý ĺ¬Ŕ∂ų°£Õ¨ēr(sh®™)AWEń£ČKłýďĢ(j®ī)ňý‘O(sh®®)∂®ĶńĹ””|ôzúy(c®®)ĶńťgŌ∂’`≤Ó£®īňŐé‘O(sh®®)ěť0£©£¨◊‘Ą”(d®įng)∂®ŃxĹ””|įŤ‘Ż£¨÷ģļů‘ŕ›Ē»Ž›S…Ō ©ľ”ĻŐ∂®ľs Ýĺ‹ĻŖ£¨ľīŅ…ŖM(j®¨n)––ń£ĎB(t®§i)«ůĹ‚°£ņŻ”√AWEń£ČKŖM(j®¨n)––ń£ĎB(t®§i)∑÷őŲĪ»āųĹy(t®Įng)ĶńANSYSŖM(j®¨n)––ń£ĎB(t®§i)∑÷őŲŖ^(gu®į)≥ŐļÜ(ji®£n)Üő≤≥‘Á°Ę∑ĹĪ„÷į≥Ķ°ĘňýĶ√ĹY(ji®¶)ĻŻ“≤∑«≥£ú (zh®≥n)ī_°£
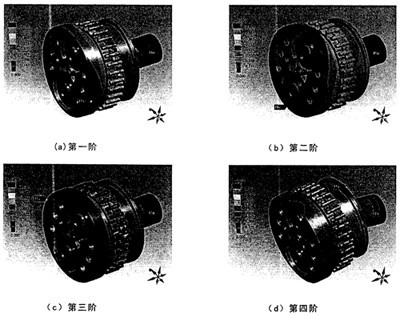
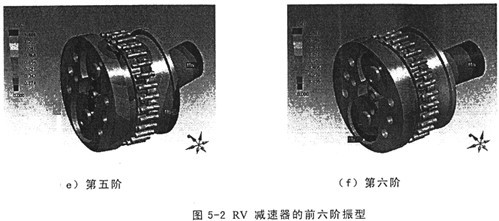
ƶ(du®¨)…ŌąD”–Ōř‘™ń£–ÕŖM(j®¨n)––ń£ĎB(t®§i)”č(j®¨)ň„ēr(sh®™)≤ĽĪō«ů≥Ų»ę≤ŅĶńĻŐ”–Ól¬ ļÕ’Ů–Õ»Ķ’»£¨‘Ĺ «ĶÕÉr(ji®§)ń£ĎB(t®§i)„≤Ńť£¨Ć¶(du®¨)’ŮĄ”(d®įng)”įŪĎ‘Ĺīů£¨Õ®≥£»°«į5°ę10ŽAń£ĎB(t®§i)¬ÓĪÕ£¨ĺę∂»ĺÕ“—◊„ČÚĽż¬ų°£Īĺ’nÓ}‘ŕ∑÷őŲ÷–«ůĹ‚Ńň«į11ŽAń£ĎB(t®§i)ī®ľ‚£¨Ŗ@–©ń£ĎB(t®§i)ĶńĻŐÓl¬ ļÕ’Ů–Õ«ťõr“äĪŪ5-1£¨ąD5-2ÉHĹo≥ŲúpňŔ∆ųĶń«į6ŽAĻŐ”–’Ů–Õ…ńŌ £¨Õ®Ŗ^(gu®į)’Ů–ÕąDļÕłųŽA’Ů–ÕĶńĄ”(d®įng)ģčÔ@ ĺŅ’—Š£¨Ņ…÷Ī”^Ķō∑÷őŲRVúpňŔ∆ųĶńĄ”(d®įng)ĎB(t®§i)Őō–‘°£
|
ń£ĎB(t®§i)ŽAīő |
ĻŐ”–Ól¬ £®Hz) |
’Ů–Õ |
|
1 |
836.42 |
›Ē»Ž›Sňģ∆ĹĒ[Ą”(d®įng) |
|
2 |
841.39 |
›Ē»Ž›SīĻ÷ĪĒ[Ą”(d®įng) |
|
3 |
1300.58 |
Ąā–‘ĪPļÕ›Ē≥ŲĪPҧřD(zhu®£n)£ęĒ[ĺÄ›ÜҧřD(zhu®£n) |
|
4 |
4164.25 |
›Ē»Ž›SīĻ÷ĪŹĚ«ķ |
|
5 |
4403.56 |
›Ē»Ž›Sňģ∆ĹŹĚ«ķ |
|
6 |
4882.55 |
›Ē»Ž›S›SŌÚ…žŅs |
|
7 |
8323.59 |
›Ē»Ž›SŇcĚuť_ĺÄżX›Üňģ∆ĹĒ[Ą”(d®įng) |
|
8 |
9240.31 |
Ěuť_ĺÄżX›Ü“Ý≥Í°Ę«ķĪķ›SľįĒ[ĺÄ›ÜҧřD(zhu®£n) |
|
9 |
9947.73 |
Ěuť_ĺÄżX›ÜŇc«ķĪķ›SĒ[Ą”(d®įng) |
|
10 |
10112.03 |
Ąā–‘ĪPŇc›Ē≥ŲĪPŇÚ√õ |
|
11 |
10159.04 |
Ěuť_ĺÄżX›ÜŇc«ķĪķ›SĒ[Ą”(d®įng) |
ĪŪ5-1 RVúpňŔ∆ųĶńĻŐ”–Ól¬ ľį’Ů–ÕĪŪ
‘ŕRVúpňŔ∆ųĶńōď(f®ī)›d◊ÉĽĮļÕ’`≤Ó›^–°Ķń«ťõrŌ¬≥įłŁ£¨∆šľ§ĄÓ(l®¨)ĺÕ «áßļŌĄā∂»Ķń◊ÉĽĮÓl¬ °£RVúpňŔ∆ųĶńáßļŌĄā∂»”…Ěuť_ĺÄżX›ÜāųĄ”(d®įng)áßļŌĄā∂»ļÕĒ[ĺÄŠė›ÜāųĄ”(d®įng)áßļŌĄā∂»ĹMļŌ∂Ý≥…ŅęĶ…£¨‘ďŌĶĹy(t®Įng)ĶńŖ\(y®īn)Ą”(d®įng)÷‹∆ŕĎ™(y®©ng) «ňýįŁļ¨ĶńÉ…∑NáßļŌĄā∂»◊ÉĽĮ÷‹∆ŕĶń◊Ó–°ĻęĪ∂ĒĶ(sh®ī)ł≥ŽŁ£¨”…”ŕŹń›Ē»ŽżX›Ü›SĶĹĒ[ĺÄ›ÜĶńúpňŔĪ»ļ‹īů£¨Ņ…“‘į—Ē[ĺÄŠė›ÜáßļŌĄā∂»◊ÉĽĮĶń÷‹∆ŕ◊ųěťŖ\(y®īn)Ą”(d®įng)÷‹∆ŕńĹĽ≥£¨∆š◊ÉĽĮĶńÓl¬ ěť
f2=n2°§£®Zb-1£©/60 £®5-7£©
Ĺ÷–ŌŖŅÝ£¨n2 «Ķŕ∂ĢľČ(j®™)úpňŔ≤Ņ∑÷Ķń›Ē»ŽřD(zhu®£n)ňŔ°£‘ŕÓ~∂®Ļ¶õrŌ¬≤Żľņ£¨›Ē»Ž›SřD(zhu®£n)ňŔěť1500r/minĪķÕĮ£¨Ątn2ľsěť435r/min£¨Ŗ@ė”Ķ√f2=210.25HzįŠĶ≤£¨”…5-1Ņ…“‘įl(f®°)¨F(xi®§n)Ľý ŚŖh(yu®£n)īů”ྦྷĄÓ(l®¨)Ól¬ √‚«ų£¨“ÚīňRVúpňŔ∆ųĶń’ŮĄ”(d®įng)ňģ∆Ĺļ‹ĶÕ£¨Ŗ@“≤ «RVúpňŔ∆ų‘ĹĀŪ(l®Ęi)‘ĹŹV∑ļĶōĎ™(y®©ng)”√”ŕôC(j®©)∆ų»ňĶń“ĽāÄ(g®®)∑«≥£÷ō“™Ķń‘≠“Ú űńī°£