RV�p�����ķ��������о�
ǰ�潨��RV�p������̓�M�әC(j��)ģ�͕r(sh��)�����O(sh��)�[��݆�c�݆�g�](m��i)���g϶���������ڌ�(sh��)�H�Ĕ[���݆�p�����л����������ڇ������g�γ���Ĥ���ޣ��a(b��)����������ğ���Û�������`��ֺʫ���ڔ[��݆����X�g��(y��ng)��һ�����X��(c��)�g϶��϶����t��ʹ����Ħ���pʧ����Ϧ���������X���g�a(ch��n)���z�ϵ����ס������c��(sh��)�H������r�Ǻ���̓�M�әC(j��)���g(sh��)��Ҫ���]�IJ��ࡣ��һ�������ڙC(j��)����Ҫ��ܸߵĶ�λ���Ⱥ;��܂���(d��ng)����ˌ�(du��)RV�p�����Ă���(d��ng)�`���c�ճ̽��`���Ҫ������֮������ͨ�������(d��ng)�`������Sֵ�H��1�����⣬�ҿճ̽��`��Ҳ�����^(gu��)1.5�䣬���[��݆������RV�p��������������ҪҲ���y�ĭh(hu��n)��(ji��)š�ƣ������η�ʽ�����������x��(du��)����(g��)�C(j��)��(g��u)����(d��ng)�`��ճ̽��`���Ӱ푷dz����䣬����ڱ�̓�M�әC(j��)�Ќ��[��݆���β���(du��)���M(j��n)�Ѓ�(y��u)�������O���Ҫ��
4.1 RV�p�����Д[��݆���X��������Փ
�[��݆���ξ��nj���(bi��o)��(zh��n)�X���M(j��n)�������輨��ʹ�[��݆�c��X�g�õ���(c��)϶���ҡ�����(j��)�[���݆���ǂ���(d��ng)�ć����c�ӹ�ԭ����Ŀǰ��(gu��)��(n��i)һ������������N���η���:
1.�ƾ����η�
ĥ���[��݆�X���r(sh��)�ʿ���ʹɰ݆����(du��)�����_(t��i)�Ƅ�(d��ng)һ��(g��)С�ľ��x��RzϪ�ƣ��@�Ӿ͵õ�һ�l�µĔ[���X�������������X��������ɰ݆�����_(t��i)���Ƅ�(d��ng)��Rz���������x�����ƾ����ξ�θ����֮��ؓ(f��)�ƾ����Ρ������@�N�����ӹ��[��݆�r(sh��)���ѣ�ƫ�ľ�eֻ����ɰ݆�X�ΰ돽r������(d��ng)�ȵȾ��ͼӹ���(bi��o)��(zh��n)�X���r(sh��)һ�����ӣ�ֻ����X���ĈA�돽׃?y��u)?SPAN lang=EN-US>Rzһ��Rz���衣��ˣ�ĥ���Ĕ[���X���Ķ̷�ϵ��(sh��)Kl��=eZb/(Rz-��Rz����������Փ�X���Ķ̷�ϵ��(sh��)K1��=eZb/Rz�ϰ㣬�@Ȼ�������̷�ϵ��(sh��)������ʹ�[��݆�ć������ܰl(f��)��׃����
2.�Ⱦ����η�
ĥ���[��݆�X���r(sh��)������C(j��)�����{(di��o)����ȫ�ͼӹ���(bi��o)��(zh��n)�X���r(sh��)һ�ӳ�Ȭ��ֻ�nj�ɰ݆�X�ΰ돽����(du��)�������r��pС��r���գ��@�ӵ����η����Q��Ⱦ����η����ʡ�ɰ݆�돽�����r�����Ⱦ����Σ���֮��ؓ(f��)�Ⱦ����������������@�N���η�ĥ���Ĕ[��݆�X���Ķ̷�ϵ��(sh��)Kl�](m��i)�и�׃��Լ�������X���c��(bi��o)��(zh��n)�X����ͬһ�l�̷���[���ĵȾ�����������r��С�IJ�ͬҲ��Ӱ푇������ܹ��֡�
3.�D(zhu��n)�����η�
�����@�N�����ӹ��[��݆�r(sh��)ĵ����ĥ�X�C(j��)���{(di��o)���ͼӹ���(bi��o)��(zh��n)�X���r(sh��)��ͬ������ֻ����ĥ����(bi��o)��(zh��n)�X���Ժ��Ͼͣ������X�C(j��)��(g��u)��ƫ�ęC(j��)��(g��u)��(li��n)ϵÓ�_(k��i)��Ȼ��܄�(d��ng)���X��݆�ϵ��X݆���У�ʹ�����_(t��i)�D(zhu��n)�^(gu��)һС�ĽǶȦ��������Ķ���׃�˔[��݆����һ��ĥ���r(sh��)�ij�ʼλ���ں����@������ĥ���͵õ�һ�l�c��(bi��o)��(zh��n)�X��������һ�ӵ��X���ݻͣ��H����(g��)݆�X׃��һЩվ���X�g׃��һЩ�������c(di��n)��ͬ�r(sh��)�����X��(sh��)�^��ݰ���[��݆���X픺��X���Aֱ��?j��ng)]��׃��Ϫ�裬ԓ̎�c��X�����ϕr(sh��)�](m��i)���g϶���ڣ���˲��܆Ϊ�(d��)ʹ���D(zhu��n)�����η��Ͽš�
�������N�X�����η����������D(zhu��n)�����η����H�C(j��)��(g��u)�{(di��o)���韩�����Ҳ��܆Ϊ�(d��)ʹ�÷��ͣ�Ȼ�������m��(d��ng)?sh��)��ƾ��������͵Ⱦ���������M�ϵķ�����ʹĥ�������X���c���D(zhu��n)�����η��õ����X����ӽ����ϣ�����ڂ���(d��ng)�п�ʹ����(du��)�Xͬ�r(sh��)���ϲ��̣��������X픺��X��̎�����g϶���ڣ������@�ӵ����η���ĥ���[��݆���D(zhu��n)�����η�����ö�������
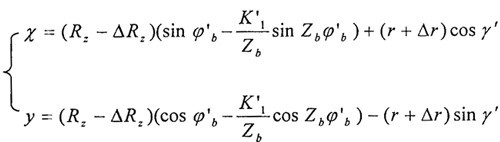
�[��݆���X����������Ӱ�RV�p��������(d��ng)���ܵ���Ҫ����(sh��)�����������轨��һ��(g��)����������ǰ�ɷN���η�����ͨ�Ô[��݆�X������ʽ������ֻҪ����(bi��o)��(zh��n)�X������ʽ��3-l���е�Rz�ԣ�Rz-��Rz�����潻����K1��K1��=e*zb/(Rz-��Rz�����棬r�ԣ�r����r�������Ϊ�����ɵõ�ͨ�Ô[��݆�X������ʽ�飺
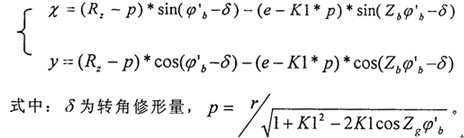
�mȻ��(sh��)�H���a(ch��n)�к���ʹ���D(zhu��n)�����η����ƣ����о��ƾ��������͵Ⱦ��������M�ϵķ����r(sh��)�����������X������Ҫ�c�D(zhu��n)�����ε��X���M(j��n)�б��^ѡ�룬����ڴ��轨���D(zhu��n)�����ε��X������ʽ��
4.2 ���ӳ���?q��)��F(xi��n)�p������(y��u)��
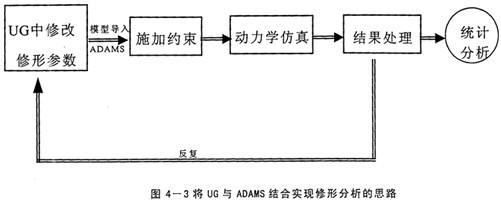
����UG�cADAMS֮�g���Ѓ�(n��i)��(li��n)�{(di��o)�Ĺ��ܣ���ADAMS�����(q��)��(d��ng)�κγߴ�Σ�ң�Ҫ���S�C(j��)���{(di��o)���������Ĵ�С��(l��i)�O(sh��)׃�[��݆�������ֵ����M(j��n)���õ���ѵĂ���(d��ng)�����������ADAMS�н����[��݆�С�Ȼ��ADAMS����[��݆�@�N��(f��)�s����������DZ��^���ģ�����x���ӳ���ķ�ʽ��(l��i)�����ź��
4.2.1 ADAMS��ʹ���ӳ���(ji��n)��
ADAMS/Solver��ADAMS�ز����ٵĺ����������հ�����Ԅ�(d��ng)�����\(y��n)��(d��ng)�W(xu��)���١�����(zh��n)���o�����Ρ���(d��ng)���W(xu��)�ľ��ԺͷǾ��Է��̣����cc++��Fortran�Y(ji��)�ϸ��ṩ�˟o(w��)���Ƶķ������g��ȵ���\(y��n)��ADAMS/Solver���ӳ����������:
���x��(bi��o)��(zh��n)��ģ�o(w��)����(sh��)�F(xi��n)��ģ�͆�Ԫ�Ż���
�����Լ���(j��ng)��ʹ�õ��Ñ��(k��)�Ķ��
ʹ��ADAMS�еIJ������ӷ��㡢����ļ顣
�����Ñ��ӳ�����朽ӵ�ADAMS�IJ��E���£�
l������(j��)��Ҫ�l(f��)�������������ADAMS�İ��bĿ����x��(du��)��(y��ng)���ӳ���ģ������������Ҫ�l(f��)��CURVE����t���x��CUESUB�ӳ���
2���Q������Ҫ���ӳ�����f�ą���(sh��)���Σ��@Щ����(sh��)�����S���ڃ�(y��u)�������Ќ�ʹ�õ��O(sh��)Ӌ(j��)׃�����ADAMSÿ���{(di��o)���ӳ���r(sh��)�����f��ͬ�ą���(sh��)��١�
3�������ӳ���ģ���ṩ�Ŀ���ŷ����ı�������ֱ���ھ��g���о����������{(di��o)ԇ�Լ��ij���
4����FORTRAN��VC++���g��������(j��)ADAMS�汾�x������(y��ng)�ľ��g���汾���о��g��ɵ��Ñ��ӳ����ͣ�����Ŀ��(bi��o)�ļ���*.obj�ļ����籱��
5���ڱ���ģʽ����������ʾģʽ�������գ�����һ����Ŀ��(bi��o)�ļ��cADAMS朽ӳ��������ɿɈ�(zh��)�е��Ñ��(k��)��*.dll��������
6)ADAMS�{(di��o)���Ñ��(k��)ա˵���a(ch��n)�������ģ�͆�Ԫ��
4.2.2�ӳ���(y��u)�������Č�(sh��)ʩ
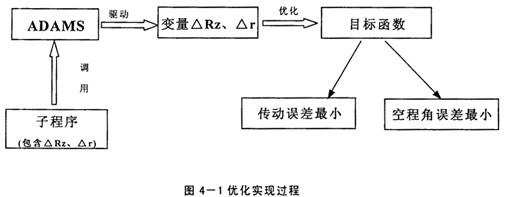
�����������룬�[��݆���η�ʽ�����������x��(du��)RV�p��������(d��ng)�`��ճ̽��`���Ӱ푺ܴ��������M(j��n)�Ѓ�(y��u)��������(y��ng)������(d��ng)�`��ճ̽��`������Ŀ��(bi��o)����(sh��)���ԣ������ƾ���������Rz���Ⱦ���������r�����O(sh��)Ӌ(j��)׃�����ҡ�Rz�c��r����·�ҡ�ؓ(f��)̖(h��o)���������η�ʽ���ȣ��ӳ������ǽ����[��݆��ͨ���X����������ͨ�^(gu��)ADAMS��(du��)�ӳ�����{(di��o)�����ǣ��Ϳɵõ��(y��u)�����νM�Ͻ��������w�Č�(sh��)�F(xi��n)�^(gu��)�����D��ʾ��
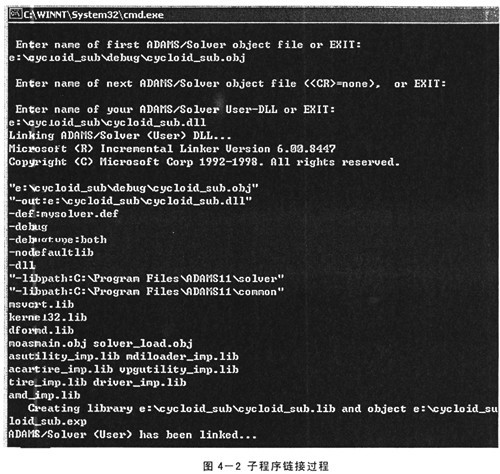
���ӳ����g�м��ѣ�FORTRAN�cVC++�ǃɷN���x�ľ��g��ΣϾ�����]��ADAMS����FORTRAN���Ƶ����棬��(du��)��������^�����⣬������x���˵�һ�N���g����⡣����(j��)������O(sh��)�뷮�������˾����˿Ɍ�(sh��)�F(xi��n)�[��݆����FORTRAN�ӳ���Χɻ��ͨ�^(gu��)���g������һ��(ji��)��朽Ӳ��E朽ӳ��ˣ�朽��^(gu��)��Ҋ(ji��n)�D4-2�����˷������M(j��n)һ�������о���ܣ���Փ�Č�������һ�N�������࣬����UG�cADAMS(li��n)������(l��i)�M(j��n)�����η������ߡ�
4.3UG�cADAMS(li��n)�{(di��o)�M(j��n)�������о�
ǰ���ѽ�(j��ng)�Ԕ[����ݔ���ą���(sh��)����ģ���������U����UG�ď�(qi��ng)��Ļ��������ą���(sh��)�����������Σ���Ȼ���ӳ���ķ�ʽ��(sh��)�F(xi��n)���˷��ǣ���UG��ԓ���ܼ��Գ������������Ҳ���Ԍ�(sh��)�F(xi��n)��(y��u)�����ε�Ŀ��ɼ�衣��(sh��)�F(xi��n)��;�����ڽ���[��݆�ı��_(d��)ʽ�п��]��������Rz�c��r���ޣ��@�Ӿͽ��������κ�Ĕ[��݆������ͬ�r(sh��)��Rz�c��r���S�C(j��)���{(di��o)��׃����������Եõ�����M�ϵ����η�ʽ�⾩������UG�Ĕ�(sh��)��(j��)�惦(ch��)���І�һ��(sh��)��(j��)��(k��)�����c(di��n)�ĵ�����D���ĺ��b��D�����̈Dȫ���Ԅ�(d��ng)������į�������˹�ȥ�M(f��i)�r(sh��)��֬�ۡ�Ȼ���������ٌ����b��ģ�͌�(d��o)�뵽ADAMS��ʩ�Ӽs���ּ�����(zh��)�з�����š��@�Ӿ͵õ���M���νM�ϵķ���Y(ji��)������(j��ng)�^(gu��)�y(t��ng)Ӌ(j��)�����Ϳɵõ���ѵ����νM���ͼӡ����w˼·���D��ʾ���ݡ�
4.3.1 ADAMS�������ļ���(ji��n)��
ADAMS���ļ���ʽ�ж�N�鵧���磮bin,.cmd,.adm,.req, .res��һЩ����ģ�ͽ��Q
��ʽSTEP,Parasolid,IGES�ȶ������ļ���ʽ��.cmd) ������һ��(g��)朗l��ѭ�h(hu��n)�^(gu��)���ṩ�˱�Ҫ���ϼ��ܡ�
ADAMS�����ļ��Á�(l��i)���xģ�͈�(zh��)��һ��(g��)��һϵ�����_�Ĺ��ܺ���(sh��)��ħ����������������ķ���(f��)���fͬ������ķ�����һ��(g��)�����ļ���ASCH��ʽ�惦(ch��)�������Ñ�����ݔ��һ��(g��)�����ļ���ADAMS��ADAMS��(zh��)���@Щ�����������ҿ���ݔ�������ļ�����m(x��)��(chu��ng)��ģ������(zh��n)�䣬����@���ڲ�ͬ��Ӌ(j��)��C(j��)ƽ�_(t��i)�ς��f��(sh��)��(j��)�ķ��㷽�����ࡣ����ʹ�������ļ���ע��ԓ�ļ�ֻ�ɰ���һ��(g��)ģ�͵Ĕ�(sh��)��(j��)�҃H����ģ��ԭ���c����Ի��壬�����������Y(ji��)���رң�����ļ��^С�տ���
�b�ڸ�ЧŪҵ������Ŀ��]���������n�}�ж�̎�õ������ļ��Ĺ���Ϯ�ȣ��^��Ҫ�����£�
1.���x�s���е��ȣ�ʩ����X�c�[��݆�Ľ��|���r(sh��)�緶������X�^�࣬�ʶ����|����(g��)��(sh��)�^��,����(g��)���x̫�M(f��i)������������ȶ��xһ��졢�ɂ�(g��)���|������ģ���ļ�ݔ����.cmd�ļ���ʽ����(du��)ԓ�ļ����������õ����x���н��|����.cmd�ļ�Ҽ�ᣬ�ڌ����ļ�ݔ�뵽ԭģ���Єt���x��������X�c�[��݆�Ľ��|��������
2.��(sh��)�F(xi��n)RV�p�����Ĕ[��݆��(y��u)�����Εr(sh��)��.cmd�ļ����������e���p�ص����ý������?y��n)�?SPAN lang=EN-US>UG�и�׃���΅���(sh��)��Ď�ģ���ٌ�(d��o)��ADAMS���������O(sh��)�íh(hu��n)�����ԡ����x�s��������@�ǘO�䷱�صĹ���ɢ��������(y��u)��Ҫ�M(j��n)�Ў�ʮ���װٴεķ������꣬����M(f��i)�r(sh��)�Ĺ����Dz�����Ҫ�����̡������ļ���Q�˴ˆ�(w��n)�}���٣�ֻҪ��һ��(g��)�ѽ�(j��ng)���x������ģ��ݔ����.cmd�ļ���������ͨ�^(gu��)����ȡ��Ҫ����Ϣ��h(hu��n)���O(sh��)���ɲ���׃�����x�������s�����x�ȼ�������һ��(g��)ͨ�õ��ļ����ԣ���(ji��n)����Ҋ(ji��n)�͌���Q��s�����x�ļ���Դ���Ժ�ÿһ��(g��)��UG��׃���΅���(sh��)��(d��o)��ADAMS���ļ�����ֱ��ʹ��ԓ�ļ�˲�r(sh��)�M(j��n)�����P(gu��n)�O(sh��)����ʻ���O�鷽�����ԡ�
4.3.2�����п��]�ļs���l��
����C(j��)�����õ�RV�p����ģ��������Ҫ������ָ��(bi��o)�DZ�횾��иߵ��\(y��n)��(d��ng)���Ⱥ�λ�þ��ȱ��ݣ��@�Ӳ���ʹ�C(j��)���˵Ĺ����C(j��)��(g��u)���_���_(d��)���A(y��)����λ��±�ʡ�����ֱң��鱣�C���\(y��n)��(d��ng)���ȼ�С�ճ̽��`��ʿ����Ҫ�_���������O(sh��)Ӌ(j��)׃�����ƾ��������c�Ⱦ�����������������RV����(d��ng)�����ĽY(ji��)��(g��u)���c(di��n)���l(f��)ǯ�������M(j��n)�Ѓ�(y��u)���r(sh��)Ҫ���]�ɂ�(g��)�s���l����
1.�̷�ϵ��(sh��)��ȡֵ�����гơ��̷�ϵ��(sh��)Kl�ڜp�����O(sh��)Ӌ(j��)�^(gu��)������һ��(g��)�^��Ҫ�ą���(sh��)��������(d��ng)O<Kl<1�r(sh��)�����γɶ̷���[����ܽ��������Փ���f(shu��)������Kl����0��l�ķ�����(n��i)��ȡ֮�ij�������(sh��)�`�c�����������ޣ�K1=0.5��0.75����ѷ������������κ�Kl=e*zb/(Rz-��Rz)���������n�}��e=0.9mm,zb=30ү�棬�����Εr(sh��)�茢Rz-��Rz������36��54 mm��(n��i)������
2.�������õĔ[��݆�c��X�M���鹲ܗ�X������Э����Ҫʹ˲�r(sh��)����(d��ng)�Ⱥ㶨ᣱ�\(y��n)��(d��ng)�`���^Сȫ�ң�Ҫ��(sh��)�F(xi��n)���X����ֶΰ��������d������Ť�D(zhu��n)����Ʋί����Ҫ��[��݆�c��X�X�λ��鹲݆���X���������ڃ�(y��u)���r(sh��)ֻҪ���C�M�����ε��X�ι������c�D(zhu��n)�����ε��X�α��^�Ǻ��о������ɝM�㹲ܗ�X�����ϡ��D�DZ��n�}�O(sh��)Ӌ(j��)��һ�N��(y��u)�����X�Σ�
4.3.3��(y��u)����(sh��)�(y��n)����
ͨ�^(gu��)�����ļ���(du��)�Ѹ�׃���΅���(sh��)��ģ���M(j��n)�����P(gu��n)���x�����M(j��n)�з��������ˢ��������l(f��)�F(xi��n)ؓ(f��)�ƾ������cؓ(f��)�Ⱦ����νM�ϲ����[��݆�c��X�g�a(ch��n)�������g϶���꣬����(du��)�e�����νM�ϼ�ؓ(f��)�ƾ࣫���Ⱦ�M�����ι��á����ƾ࣫ؓ(f��)�Ⱦ�M�����μ����ƾ࣫���Ⱦ�M�����Σ��ڿ��]�s���l����ǰ����ÿ�N��������(sh��)�(y��n)5���ı���
һԾǺ������(d��ng)�`�����
����(d��ng)�`����ָ���d��r��ݔ���S�D(zhu��n)��(d��ng)������Ƕȕr(sh��)������ݔ���S����Փ�D(zhu��n)���c��(sh��)�H�D(zhu��n)�ǵĽǶ��`����wӋ(j��)�㹫ʽ��

 ��4-1��
��4-1��
���У���erһһ�Ƕ��\(y��n)��(d��ng)�`����ϣ�һһ����r(sh��)��ݔ���S�D(zhu��n)�ǣ�iһһ����(d��ng)�ȸ��裬��outһһݔ���S�D(zhu��n)�Ǹ��ҡ����ڼӹ��`�݆�X���ε�ԭ������˲�r(sh��)����(d��ng)�ȵ�׃��Ч�ã���Ȼ���F(xi��n)����(d��ng)�`�����壬�a(ch��n)���\(y��n)��(d��ng)�IJ�ƽ��(w��n)�����硣��RV�p�����У��u�_(k��i)���X݆������ǰ��(j��)ױ������(j��)�ǔ[���݆����(d��ng)֤�ˣ����ں�(j��)�Ă���(d��ng)��һ��s��ǰ��(j��)��4��30����ǰ��(j��)�ĝu�_(k��i)���X݆�Ă���(d��ng)�`����sСͬ�ӵı���(sh��)��ݔ����룬���������(d��ng)�`���P(gu��n)�Iȡ�Q�ں�(j��)�Ĕ[���݆�ć����`���˨������(sh��)�H�����Д[��݆�����η�ʽ�����������x����Ӱ푔[���݆�ć����`��ܴ�����ػ���˱��n�}�ЃH�о���݆�X���Ό�(du��)����(d��ng)�`���Ӱ��罹�������õ��������Լ��õ��Ă���(d��ng)�`���С���4-1��ʾ������ƪ������(du��)��ؓ(f��)�ƾ࣫���Ⱦ����������ƾ࣫ؓ(f��)�Ⱦ�����ƾ࣫���Ⱦ�M�����εĂ���(d��ng)�`�����Y(ji��)��������ֻ�г�һ�M���D4-5��4-6ү�ϡ�4-7����
|
��(sh��)�(y��n)��(sh��) |
�ƾ���������mm�� |
�Ⱦ���������mm�� |
����(d��ng)�`��֣� |
�ճ̽��`��֣� |
|
1 |
-0.360 |
0.450 |
2.856 |
0.619 |
|
2 |
-.0225 |
0.375 |
4.894 |
0.643 |
|
3 |
-0.022 |
0.026 |
0.183 |
0.120 |
|
4 |
-0.250 |
0.260 |
0.196 |
0.576 |
|
5 |
-0.048 |
0.063 |
0.372 |
0.810 |
|
6 |
0.360 |
-0.120 |
0.426 |
0.586 |
|
7 |
0.430 |
-0.220 |
0.168 |
0.558 |
|
8 |
0.210 |
-0.160 |
0.353 |
0.080 |
|
9 |
0.008 |
-0.004 |
0.036 |
0.039 |
|
10 |
0.050 |
-0.035 |
0.039 |
0.062 |
|
11 |
0.360 |
0.220 |
15.588 |
1.03 |
|
12 |
0.055 |
0.051 |
1.680 |
0.546 |
|
13 |
0.180 |
0.170 |
0.436 |
0.756 |
|
14 |
0.330 |
0.220 |
1.20 |
0.96 |
|
15 |
0.042 |
0.027 |
0.310 |
0.24 |
��4-1���νY(ji��)��
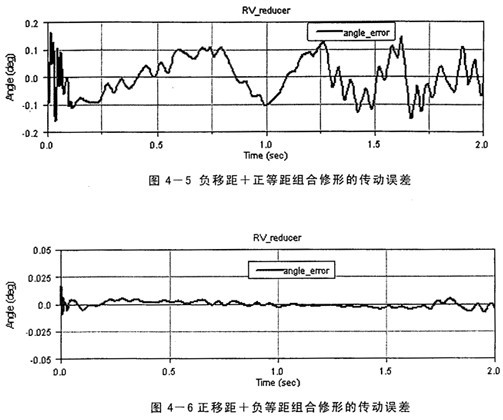
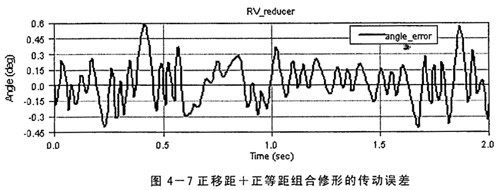
����4-l��15�M����Y(ji��)���M(j��n)�нy(t��ng)Ӌ(j��)�ɵ��������������ƾ࣫ؓ(f��)�Ⱦ�M�����εõ������C(j��)����(d��ng)�`��ͣ������ؓ(f��)�ƾ࣫���Ⱦ༰���ƾ࣫���Ⱦ�M�����εõ��Ă���(d��ng)�`��ҪС����(sh��)�H��(y��ng)���пɌ��˷N�M�����η�ʽ�����ƏV������
�������˽�RV�p�����Д[��݆�c�݆���ό�(sh��)�H�Ă���(d��ng)��B(t��i)�����������ķ�������Ч�Ը��ţ��ڴ��xȡ���B�F���W(xu��)Ժ���Ƶ�RV-25OA��p�������ձ������������о���RV�әC(j��)�Ă���(d��ng)�`���M(j��n)�Ќ�(du��)�����������B�F���W(xu��)Ժ�ڿ��]��(y��u)���M�����μ����(xi��ng)�����`���ǰ���«@�ØәC(j��)�Ă���(d��ng)�`���0.68�䣬�ձ�����������Ҳ���]���(xi��ng)�`����������ԇ�(y��n)�әC(j��)�Ă���(d��ng)�`���0.617�����������о����õ��Ă���(d��ng)�`��ķ���Y(ji��)������(sh��)����լ�����������ƾ࣫ؓ(f��)��ֺ�M�����εõ������C(j��)����(d��ng)�`��dz�С����С�����σɂ�(g��)�о��C(j��)��(g��u)�ĽY(ji��)����ѱ��ԭ�����ڷ����^(gu��)���О麆(ji��n)����Ҋ(ji��n)δ���]���N�����`���Ӱ푣������о��ķ��������ǜ�(zh��n)�_��Ч����Dz�������õĽY(ji��)�����ڌ�(sh��)�H���a(ch��n)�йܶ壬����Ч�ظ��M(j��n)RV�p�����Ă���(d��ng)���ܣ����Ƅ�(d��ng)ԓ�I(l��ng)��Ŀ��ٰl(f��)չ���ܡ�
�����ճ̽��`��ķ���
�ճ̽��`����Ҫָݔ���S�_(k��i)ʼ�D(zhu��n)��(d��ng)�r(sh��)��ģ��������X��(c��)�g϶���ڣ�ݔ���S������ݔ���Sһ��(g��)С�D(zhu��n)����ס����Ĵ��ڌ�Ӱ�ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)Ʒ�|(zh��)���ճ̽��`����о���(du��)�C(j��)�����õĸ߾���RV����(d��ng)�b�Á�(l��i)�f(shu��)�Ƿdz���Ҫ�ij���
RV�p�����ճ̽��`����ڵĸ���ԭ���ǵڶ���(j��)����(d��ng)�Д[��݆�c�݆�g�ć����g϶���²ַ裬�����˱��C����(d��ng)�������M(j��n)�У��[��݆�c�݆�g��횱��C��һ���ć����g϶��Ψ��Ҳ�����f(shu��)²��RV�p�����Ŀճ̽��`���Dz��ɱ���ģ�����Ҫ������ΜpС���Ϳǡ�Ӱ푔[��݆�c�݆�g�����g϶�����أ�Ҳ��Ӱ푿ճ̽��`���С�������Д[��݆�����κ͂���(d��ng)Ԫ���������`��ӷ������n�}�о��������O(sh��)Ӌ(j��)����(sh��)�ĵȾ���ƾ���������(du��)�ճ̽��`���Ӱ푡�
�����������������õ��Ŀճ̽��`��ֵҊ(ji��n)��4-1ף�أ��ɱ��еĽY(ji��)���y(t��ng)Ӌ(j��)�ĵó����ƾ�+ؓ(f��)�Ⱦ�M�����ε��`��ֵҪС�������ɷN�M�����ε�ֵ�����������_�õ؝M���O(sh��)Ӌ(j��)Ҫ��
�C����������Փ�ĵó��ڲ����]���N�����`����õ�����C�[��݆�c��X�鹲�ϵ�ǰ���£����ƾ�ʮؓ(f��)�Ⱦ�M�ϵ����η�ʽ�õ��Ă���(d��ng)�`��ճ̽��`��ֵ���^С���䡣��õ��½M���νM�����ƾ���������Rz=0.008��Ҵ���Ⱦ���������r=-0.004���˽M�õ��Ă���(d��ng)�`��ճ̽��`��ֵ����С��̣��
